


Беспроводное управление роботом с помощью команд Bluetooth. Тезисный доклад | Проект "Сделай сам"
Робот определяется как механическая конструкция, способная выполнять человеческие задачи или вести себя как человек. Создание робота требует опыта и сложного программирования. Речь идет о создании систем и сборке двигателей, датчиков сонара и проводов, среди других важных компонентов | Выпускной проект для студентов факультета электроники и связи eng | Электротехника.
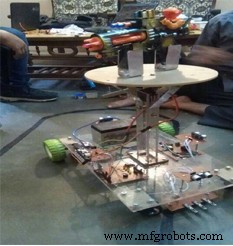 В этом документе рассказывается о конструкции и конструкции робота, способного чувствовать врага. Этот робот реализует следующие понятия:датчик окружающей среды, пропорциональное управление двигателем. Этот робот обрабатывает информацию от своих различных датчиков и ключевых аппаратных элементов через микроконтроллер (Arduino mega). Он использует гидроакустические датчики для обнаружения пожара. Робот, способный чувствовать врага и стрелять в него. Датчики сонара будут использоваться для первоначального обнаружения. Как только враг обнаружен, робот автоматически включает зуммер в течение нескольких секунд, робот активируется и начинает стрелять по врагу. Проект помогает генерировать интересы, а также инновации в области робототехники, работая над практическим и доступным решением для спасения жизней и снижения риска материального ущерба.
В этом документе рассказывается о конструкции и конструкции робота, способного чувствовать врага. Этот робот реализует следующие понятия:датчик окружающей среды, пропорциональное управление двигателем. Этот робот обрабатывает информацию от своих различных датчиков и ключевых аппаратных элементов через микроконтроллер (Arduino mega). Он использует гидроакустические датчики для обнаружения пожара. Робот, способный чувствовать врага и стрелять в него. Датчики сонара будут использоваться для первоначального обнаружения. Как только враг обнаружен, робот автоматически включает зуммер в течение нескольких секунд, робот активируется и начинает стрелять по врагу. Проект помогает генерировать интересы, а также инновации в области робототехники, работая над практическим и доступным решением для спасения жизней и снижения риска материального ущерба. 1.1 Обзор
Проект включает в себя беспроводную иерархию робота, поскольку он управляется с помощью команд устройства Bluetooth, которое управляет движением робота. Робот является полностью удаленным и обеспечивает полный обзор области, которую необходимо контролировать.1.2 Цели и задачи:
Основная цель проекта — обеспечить безопасность территории, неподконтрольной вооруженным силам. Следовательно, этот робот может проникнуть в эти места благодаря своим размерам и простоте управления.Цели: • Обеспечить удаленный мониторинг и контроль приложения для анализа. • Разрешить пользователю манипулировать противником с помощью манипулятора. • Обеспечить визуальную обратную связь для места под охраной. • Предоставить очень удобное управляющее приложение. 1.3 Системное описание области действия :Робот использует управляющее приложение на стороне пользователя для удаленного управления роботом с помощью беспроводной технологии. Входные данные от пользователя последовательно передаются через устройство Bluetooth на робота, где они принимаются, идентифицируются и передаются в соответствующий модуль.· Входные данные для системы поступают от пользователя для движения робота. · Этот ввод сначала обрабатывается управляющим приложением и последовательно передается по каналу Bluetooth. Этот ввод затем принимается роботом и снова обрабатывается. · Выходом системы является обработанный сигнал на соответствующий модуль. Этот модуль может быть двигателем базы робота.
Основные входные и выходные данные:
· Входные сигналы · Движение манипулятора · Движение робота. Мы разработали его как робота-помощника для службы безопасности, но есть ряд других применений этого робота. Его могут использовать: • Полиция:захват заложников • Военные:для разведывательных миссий • Авиабазы:будет использоваться для работы с опасными или радиоактивными материалами.1.4 Теоретические основы и организация
Диссертация состоит из пяти глав. Здесь представлено краткое объяснение: Глава 1:ВведениеВ этой главе обсуждается вопрос, касающийся предыстории задач диссертации и структуры исследования
. Глава 2. Обзор литературы В этой главе в основном обсуждаются устройства Bluetooth. Некоторая литература по этой теме диссертации также включена в эту главу. Глава 3. Инструменты и методы В этой главе обсуждаются все инструменты и программное обеспечение, используемые для создания проекта Глава 4:Методологии В главе 4 основное внимание будет уделено процедуре, методу и реализации теории путем имитационного моделирования предлагаемого робота-обнаружителя врагов, связанного с темой диссертации. Глава 5:Результаты и анализРобот практически протестирован и проверен. Тесты включают эффективность системы датчиков робота и ее производительность.
Глава 6. Заключение В заключении делается вывод о полученных результатах. Это также включает в себя новинки в работе и предложения для будущей работы.Мы надеемся, что эта статья поможет студентам университетов, которые получают степень бакалавра или магистра в электроника и связь .Пожалуйста, свяжитесь с нами для получения полного тезисного отчета
Промышленные технологии
- Будущее робототехники
- Робот Raspberry Pi, управляемый через Bluetooth
- Как сделать вашу первую интеграцию робота успешной
- Управление бытовой техникой через Интернет или мобильное устройство
- Arduino с Bluetooth для управления светодиодом!
- Рука робота, управляемая через Ethernet
- Робот-следящий за линией управления ПИД
- Робот для предотвращения препятствий, контролируемый Bluetooth
- Переживание проекта миграции системы управления
- ПИД-управление захватом робота в Matlab / Simulink