


Что такое ПИД-регулятор? Его типы, работа и приложения
ПИД-регуляторы — что это такое и как они работают?
ПИД-регулятор является наиболее распространенным алгоритмом управления, используемым в промышленной автоматизации и приложениях, и более 95% промышленных контроллеров относятся к типу PID. ПИД-регуляторы используются для более точного и точного управления различными параметрами.
Чаще всего они используются для регулирования температуры, давления, скорости, расхода и других параметров процесса. Благодаря высокой производительности и функциональной простоте они были приняты в огромных промышленных приложениях, где более точное управление является первоочередным требованием. Давайте посмотрим, как работает ПИД-регулятор. ?
- Запись по теме:Что такое распределенная система управления (DCS)?

Что такое ПИД-регулятор?
Сочетание пропорциональных, интегральных и производных действий чаще называют действием PID, отсюда и название PID. (Пропорционально-интегрально-производная) контроллер . Эти три основных коэффициента варьируются в каждом ПИД-регуляторе для конкретного приложения, чтобы получить оптимальную реакцию.
Он получает входной параметр от датчика, который называется фактической переменной процесса. Он также принимает требуемый выходной сигнал привода, который называется установленной переменной, а затем вычисляет и объединяет пропорциональные, интегральные и производные характеристики для вычисления выходного сигнала привода.
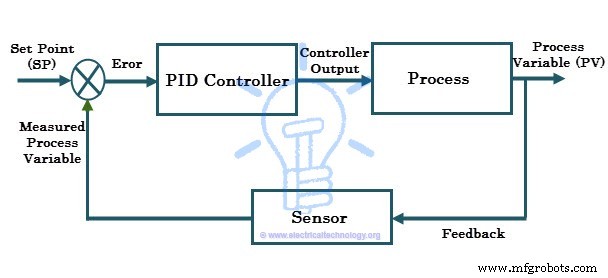
Рассмотрите типичную систему управления, показанную на рисунке выше, в которой переменная процесса должна поддерживаться на определенном уровне. Предположим, что переменной процесса является температура (в градусах Цельсия). Для измерения переменной процесса (например, температуры) используется датчик (скажем, термометр сопротивления).
Уставка – это желаемая реакция процесса. Предположим, что процесс должен поддерживаться при температуре 80 градусов по Цельсию, и тогда уставка равна 80 градусам по Цельсию. Предположим, что измеренная датчиком температура составляет 50 градусов по Цельсию (что является не чем иным, как переменной процесса), но уставка температуры составляет 80 градусов по Цельсию.
Это отклонение фактического значения от желаемого в алгоритме ПИД-регулирования приводит к тому, что выходной сигнал на привод (здесь это нагреватель) выдается в зависимости от комбинации пропорциональных, интегральных и производные ответы. Таким образом, ПИД-регулятор непрерывно изменяет выходной сигнал привода до тех пор, пока переменная процесса не установится на заданное значение. Это также называется системой управления с обратной связью с обратной связью .
Связанный пост:
- Что такое привод переменного тока? Работа и типы электрических приводов и ЧРП
- Что такое привод постоянного тока? Эксплуатация и классификация приводов постоянного тока
Работа ПИД-регулятора
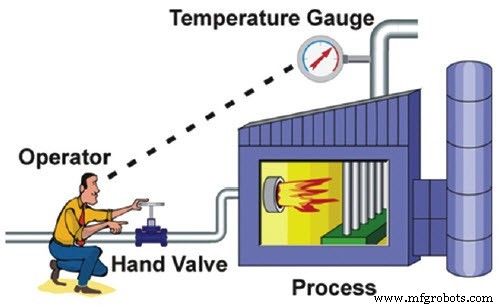
При ручном управлении оператор может периодически считывать переменную процесса (которая должна контролироваться, например, температуру, расход, скорость и т. д.) и настраивать переменную управления (которая которыми можно манипулировать, чтобы довести управляющую переменную до заданных пределов, таких как нагревательный элемент, проточные клапаны, мощность двигателя и т. д.). С другой стороны, при автоматическом управлении измерения и регулировка выполняются автоматически на постоянной основе.
Все современные промышленные контроллеры относятся к автоматическому типу (или контроллерам с замкнутым контуром), которые обычно предназначены для выполнения одного или нескольких управляющих воздействий. Эти управляющие действия включают
- Контроллер ON-OFF
- Пропорциональный контроллер
- Пропорционально-интегральный контроллер
- Пропорционально-дифференциальный контроллер
- Пропорционально-интегрально-дифференциальный контроллер
В случае контроллера ВКЛ-ВЫКЛ возможны два состояния для управления управляемой переменной, т. е. либо полностью ВКЛ (когда переменная процесса ниже заданного значения), либо полностью ВЫКЛ ( когда переменная процесса выше уставки). Таким образом, выход будет носить колебательный характер. Для достижения точного управления в большинстве отраслей используется ПИД-регулятор (или PI или PD). зависит от приложения). Давайте посмотрим на эти управляющие действия.
P-контроллер
Пропорциональный контроль или просто P-контроллер производит контрольный выход, пропорциональный текущей ошибке. Здесь ошибка — это разница между заданным значением и переменной процесса (т. е. e =SP — PV). Это значение ошибки, умноженное на пропорциональный коэффициент усиления (Kc), определяет выходной отклик, или, другими словами, пропорциональный коэффициент определяет отношение пропорционального выходного отклика к значению ошибки.
Например, величина ошибки равна 20, а Kc равна 4, тогда пропорциональный ответ будет равен 80. Если значение ошибки равно нулю, выходной сигнал или отклик контроллера будут равны нулю. Скорость реакции (переходная характеристика) увеличивается за счет увеличения значения пропорционального усиления Kc. Однако, если Kc увеличивается за пределами нормального диапазона, переменная процесса начинает колебаться с большей скоростью, что вызывает нестабильность системы. 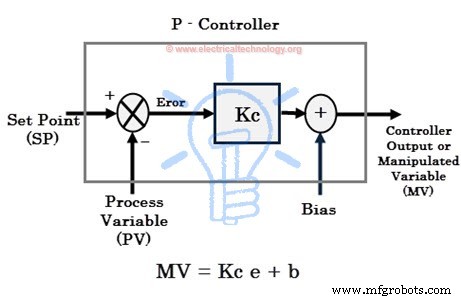
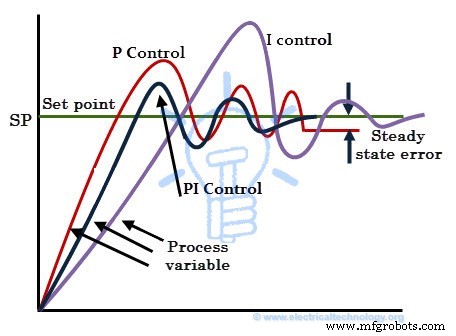
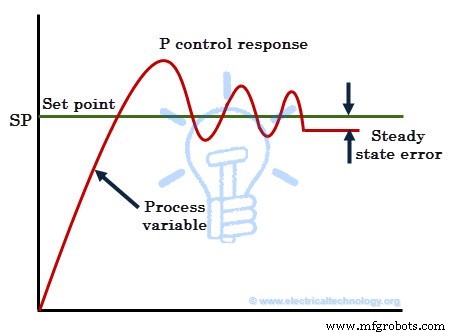 Хотя П-регулятор обеспечивает стабильность переменной процесса с хорошей скоростью отклика, всегда будет ошибка между уставка и фактическая переменная процесса. В большинстве случаев этот контроллер снабжен ручным сбросом или смещением, чтобы уменьшить ошибку при отдельном использовании. Однако этот контроллер не может обеспечить нулевое состояние ошибки. Следовательно, в отклике p-регулятора всегда будет устойчивая ошибка, как показано на рисунке.
Хотя П-регулятор обеспечивает стабильность переменной процесса с хорошей скоростью отклика, всегда будет ошибка между уставка и фактическая переменная процесса. В большинстве случаев этот контроллер снабжен ручным сбросом или смещением, чтобы уменьшить ошибку при отдельном использовании. Однако этот контроллер не может обеспечить нулевое состояние ошибки. Следовательно, в отклике p-регулятора всегда будет устойчивая ошибка, как показано на рисунке.
Похожие сообщения:
- Что такое промышленная автоматизация | Типы промышленной автоматизации
- Система автоматизации умного дома — схема и исходный код
Я-контроллер
- Встроенный контроллер или Я-контроллер в основном используется для уменьшения установившейся ошибки системы. Интегральная составляющая интегрирует член ошибки за период времени, пока ошибка не станет равной нулю. Это приводит к тому, что даже небольшое значение ошибки приводит к высокой интегральной характеристике. В состоянии нулевой ошибки он удерживает выход конечного устройства управления на последнем значении, чтобы поддерживать нулевую установившуюся ошибку, но в случае П-регулятора выход равен нулю, когда ошибка равна нулю.
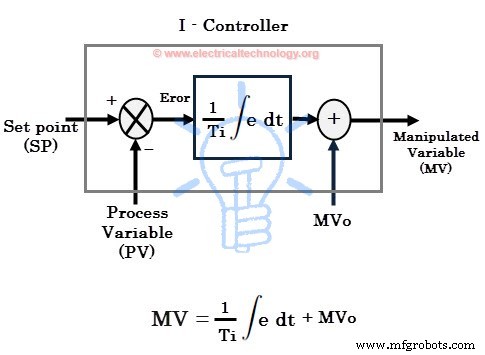
Если ошибка отрицательна, интегральный отклик или выходной сигнал будут уменьшены. Скорость реакции медленная (означает, что реакция медленная), когда используется только I-регулятор, но улучшает реакцию в установившемся режиме. Уменьшая интегральное усиление Ki, скорость отклика увеличивается.
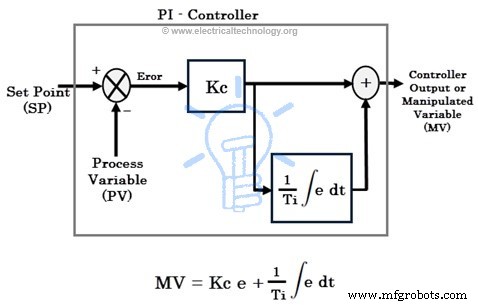
Для многих приложений пропорциональное и интегральное управление комбинируются для достижения хорошей скорости отклика (в случае П-регулятора) и лучшего отклика в установившемся режиме (в случае И-регулятора). Чаще всего ПИ-контроллеры используются в промышленной эксплуатации для улучшения переходных и установившихся характеристик. Ответы только I-контроля, только p-контроля и PI-контроля показаны на рисунке ниже .
Ответ D-контроллера
Производный контроллер ( или простоD-контроллер) видит, как быстро переменная процесса изменяется в единицу времени, и производит выходные данные, пропорциональные скорости изменения. Выходная производная равна скорости изменения ошибки, умноженной на константу производной. D-контроллер используется, когда переменная процессора начинает изменяться с высокой скоростью.
В таком случае D-контроллер перемещает окончательное управляющее устройство (например, регулирующие клапаны или двигатель) в таком направлении, чтобы противодействовать быстрому изменению переменной процесса. Следует отметить, что D-контроллер сам по себе не может использоваться ни для каких приложений управления. 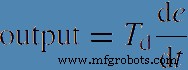
Действие по производной увеличивает скорость ответа, поскольку оно дает толчок выходным данным, таким образом предвосхищая поведение ошибки в будущем. Более быстро D-регулятор реагирует на изменения переменной процесса, если член производной велик (что достигается увеличением постоянной производной или времени Td).
В большинстве ПИД-регуляторов отклик D-регулятора зависит только от переменной процесса, а не от ошибки. Это позволяет избежать всплесков производительности (или резкого увеличения производительности) в случае внезапного изменения уставки оператором. Кроме того, в большинстве систем управления используется меньшее время производной td, поскольку отклик производной очень чувствителен к шуму в переменной процесса, что приводит к получению чрезвычайно высокого выходного сигнала даже при небольшом уровне шума. 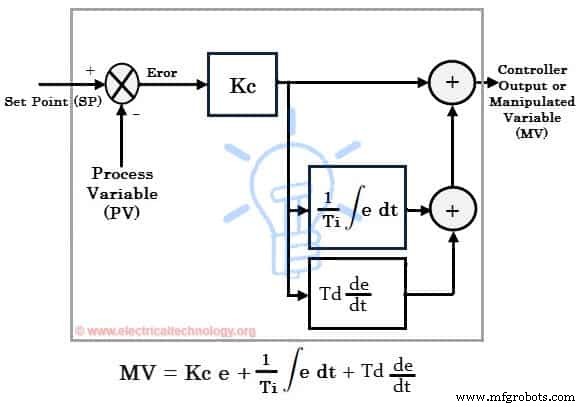
Поэтому путем объединения пропорциональных, интегральных и производных характеристик управления формируется ПИД-регулятор. ПИД-регулятор находит универсальное применение; однако необходимо знать настройки ПИД-регулятора и правильно настраивать его, чтобы получить желаемый выходной сигнал. Под настройкой понимается процесс получения идеального отклика ПИД-регулятора путем установки оптимальных коэффициентов усиления пропорциональных, интегральных и производных параметров. 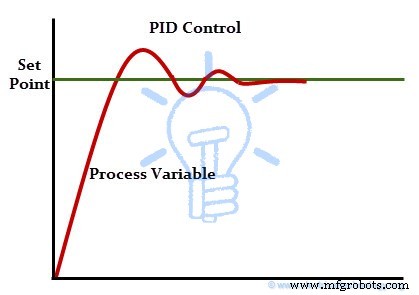
Существуют различные методы настройки ПИД-регулятора для получения желаемого отклика. Некоторые из этих методов включают метод проб и ошибок, метод кривой реакции процесса и метод Зейглера-Николса. Чаще всего используются методы Зейглера-Николса и методы проб и ошибок.
Это о ПИД-регуляторе и его работе. Благодаря простоте структуры регулятора ПИД-регуляторы применимы для множества процессов. А также его можно настроить на любой процесс, даже не зная подробной математической модели процесса. Некоторые из приложений включают управление скоростью двигателя на основе ПИД-регулятора, контроль температуры, контроль давления, контроль расхода, уровня жидкости и т. д.
ПИД-регуляторы реального времени
Сегодня на рынке доступны различные типы ПИД-регуляторов, которые можно использовать для любых промышленных задач управления, таких как уровень, расход, температура и давление. При принятии решения об управлении такими параметрами процесса с помощью ПИД-регулятора можно использовать либо ПЛК, либо автономный ПИД-регулятор.
Автономные ПИД-регуляторы используются там, где необходимо отслеживать и контролировать один или два контура или в ситуациях, когда к ним сложно получить доступ в более крупных системах. Эти специализированные устройства управления предлагают множество вариантов для одноконтурного и двухконтурного управления. Автономные ПИД-регуляторы предлагают несколько конфигураций уставок, а также генерируют несколько независимых аварийных сигналов. 
Некоторые из этих автономных контроллеров включают контроллеры температуры Yokogava, ПИД-регуляторы Honeywell, ПИД-регуляторы с автоматической настройкой OMEGA, ПИД-регуляторы ABB и ПИД-регуляторы Siemens.
В большинстве приложений управления ПЛК используются в качестве ПИД-регуляторов. Блоки PID встроены в PLC/PAC и предлагают расширенные возможности для точного управления. ПЛК более интеллектуальны и мощны, чем автономные контроллеры, и облегчают работу. Каждый ПЛК содержит блок PID в своем программном обеспечении для программирования, будь то ПЛК Siemens, ABB, AB, Delta, Emersion или Yokogava.
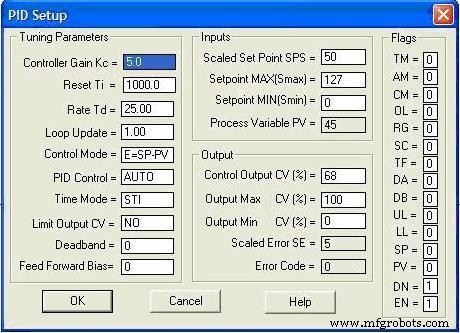
На рисунке ниже показан блок PID Allen Bradley (AB) и окно его настройки. 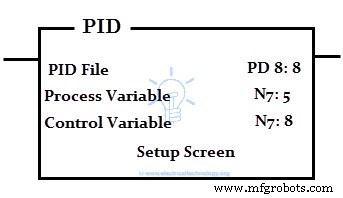
На рисунке ниже показан блок PID Siemens. . 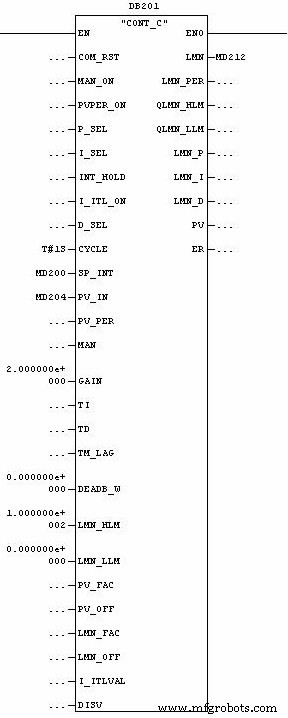
На рисунке ниже показан ПИД-регулятор. VI, предлагаемые набором инструментов LabVIEW PID. 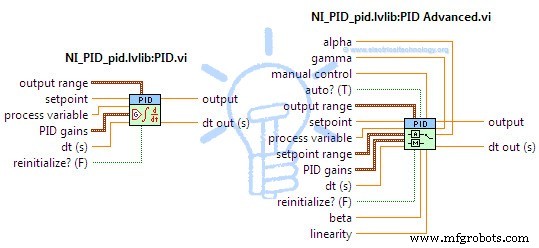
Промышленные технологии
- Как работает датчик расстояния и его применение
- Что такое 3D-печать? Принцип работы | Типы | Приложения
- Что такое обработка лазерным лучом? - Типы и работа
- Что такое быстрое прототипирование? Типы и работа
- Что такое аддитивное производство? - Типы и работа
- Что такое протяжка? - Процесс, работа и типы
- Что такое лазерная сварка? - Работа, виды и применение
- Что такое сварка сопротивлением? - Типы и работа
- Что такое координатно-сверлильный станок? - Типы и работа
- Что такое экструзия? - Работа, типы и применение