


Как работают датчики времени полета (ToF)? Взгляд на 3D-камеры ToF
Как датчики времени полета определяют расстояния? Узнайте больше о камерах ToF на примере 3D-камеры.
Как датчики времени полета определяют расстояния? Узнайте больше о камерах ToF на примере 3D-камеры.
За место в вашем мобильном телефоне и автомобиле соревнуются три ведущие технологии трехмерной визуализации. Эти технологии представляют собой стереоскопические изображения, структурированную световую проекцию и времяпролетные (или ToF) камеры. Данные, генерируемые этими устройствами, могут обеспечивать обнаружение пешеходов, аутентификацию пользователей на основе черт лица, обнаружение движения рук и передачу алгоритмов SLAM (одновременная локализация и отображение).
Двумя крупнейшими игроками в этой сфере являются компании AMS и Infineon. На момент написания AMS имеет по одному датчику каждого типа, а Infineon специализируется только на датчиках времени пролета.
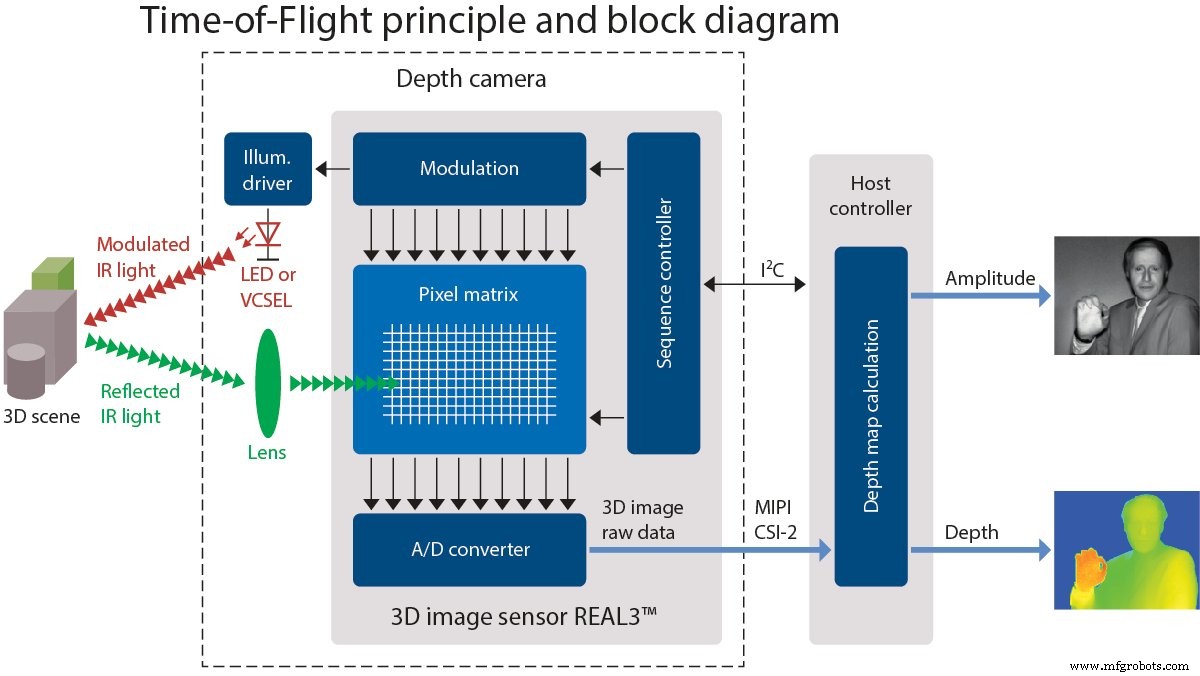
В этой статье описывается технология, лежащая в основе времяпролетных датчиков, с упором на комплект разработчика 3D-камеры «pico flexx» от pmdtechnologies. (Прежде чем вы спросите, и "pico flexx", и "pmdtechnologies" представлены на их веб-сайтах в нижнем регистре.)
Pico flexx построен на основе совместно разработанного датчика 3D изображения REAL3 от Infineon и pmd.
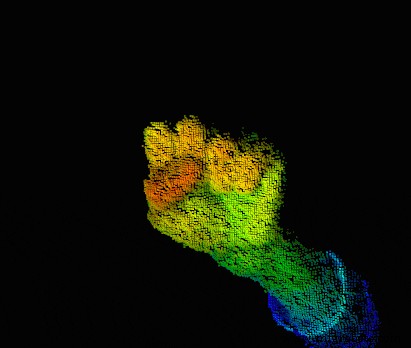
Трехмерное изображение руки в ложных цветах, полученное с сайта pmdtec.com 29 апреля 2019 г. Цвета отображаются на отдельные пиксели в зависимости от расстояния от датчика до руки. (красный - рядом, синий - далеко)
Обратите внимание, что pmd предоставила нам устройство для этой статьи.
Что такое датчик времени полета?
Датчики времени полета измеряют время, необходимое для того, чтобы что-то преодолело расстояние через среду. Как правило, это измерение времени, прошедшего между излучением волнового импульса, его отражением от объекта и его возвращением на датчик ToF. Времяпролетная камера - это устройство, которое использует измерение ToF для определения расстояний между камерой и объектами или окружающей средой, создавая изображения, генерируемые индивидуально измеренными точками.
Приложения ToF-камер включают системы визуализации LiDAR без лазерного сканера, обнаружение и отслеживание движения, обнаружение объектов для машинного зрения и автономного вождения, топографическое картографирование и многое другое.
Но как достигаются эти измерения?
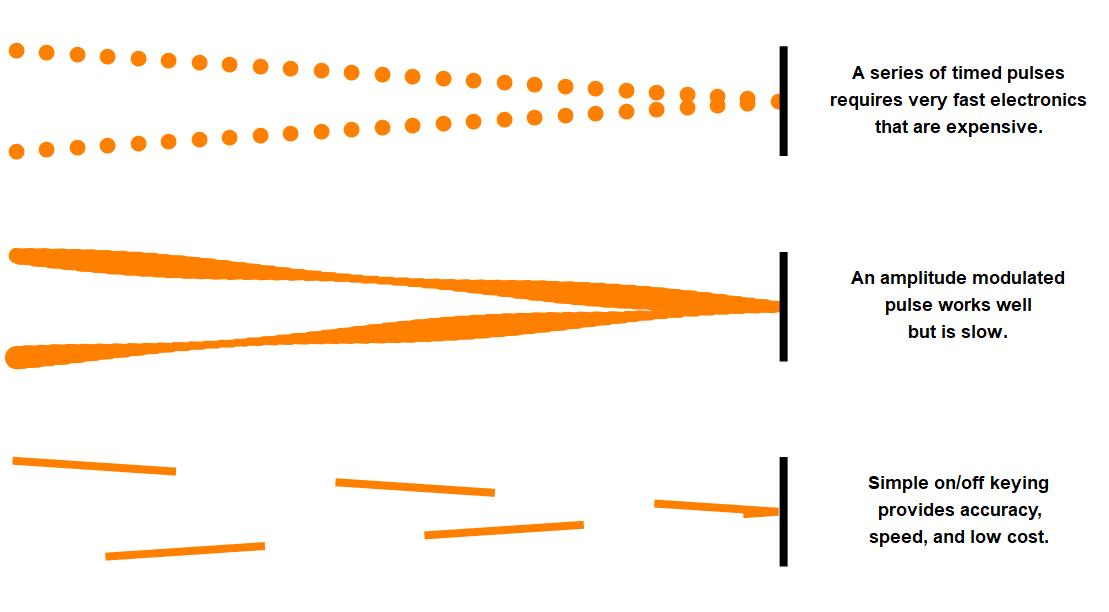
Ниже я представил три способа использования времени в пути для определения расстояния.
Методы использования времени в пути для определения расстояний
Вверху изображения вы можете увидеть первый метод, который заключается в отправке импульсов и измерении временного интервала, пока они не вернутся после отражения.
В середине изображения показан второй метод, при котором вы можете модулировать амплитуду источника света и записывать фазовый сдвиг отраженной волны.
Внизу изображения представлен третий метод:передача прямоугольных импульсов с коэффициентом заполнения 50% и запись количества возвращенного света, приходящего в определенный интервал.
ToF-камеры миллиметрового уровня
Свет и радиоволны распространяются со скоростью почти 300000000000 мм / с, что соответствует ~ 3,3 пс для волны, проходящей 1 мм (и еще 3,3 пс для возврата). Это означает, что если вам нужно устройство, которое может отображать все объекты в комнате, в которой вы находитесь, и вам нужно разрешение ~ 1 мм, вашей временной электронике потребуется пикосекундное разрешение. Это соответствует тактовой частоте в сотни ГГц.
Спроектировать электронные схемы, работающие на этих частотах, непросто и непросто, поэтому разработчикам пришлось придумать способ работы на более низких частотах, если они надеялись сделать устройства доступными для потребителей.
Существуют два распространенных метода достижения точности миллиметрового уровня при работе с разумными частотами ниже ГГц:
- Связь фазового сдвига синусоидально модулированной волны с расстоянием
- Использование фазового сдвига прямоугольной волны с коэффициентом заполнения 50% и дифференциального напряжения для определения расстояния.
В следующих разделах мы рассмотрим эти два метода более подробно.
Определение расстояния по фазовому сдвигу амплитудно-модулированной волны
Допустим, вы хотите построить небольшой офис или большую гостиную с максимальной длиной 15 м. Чтобы определить подходящую рабочую частоту для этой длины, используйте $$ c =\ lambda \ cdot f $$, где c - скорость света (c =3x10 8 м / с), λ - одна длина волны (λ =15 м), а ƒ - частота. В этом примере ƒ =20 МГц, с которой относительно легко работать.
Все начинается, когда выход яркого света модулируется синусоидальным сигналом 20 МГц. Световая волна в конечном итоге достигнет объекта или стены и будет отражаться в обратном направлении. Более диммерная версия исходного модулированного света вернется в приемник. Если объект не находится на расстоянии точно целое число, кратное 15 метрам, фаза будет сдвинута на некоторую величину.
Сдвиг фазы можно использовать для расчета расстояния, пройденного волной.
Если вы можете точно измерить фазовый угол, вы можете точно определить расстояние, на котором отражающий объект находится от датчика / приемника.
Как измерить фазовый угол синусоиды
Итак, как быстро измерить фазовый угол синусоиды? Это включает в себя измерение амплитуды принятого сигнала в четырех равноотстоящих точках (то есть на расстоянии 90 ° или 1/4 λ).
$$ \ varphi =ArcTan \ left (\ frac {A_1-A_3} {A_2-A_4} \ right) $$
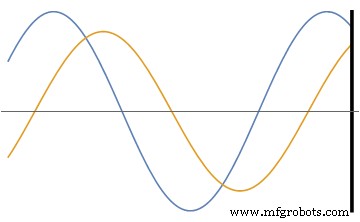
Я попытался проиллюстрировать связь между измерениями и фазовым углом ниже. Соотношение разницы между A 1 и A 3 и разница между A 2 и A 4 равен тангенсу фазового угла. ArcTan - это на самом деле функция арктангенса с двумя аргументами, которая отображает соответствующие квадранты и определяет, когда A 2 =A4 и A 1 > A 3 или A 3 > A 1 как 0 ° или 180 ° соответственно.
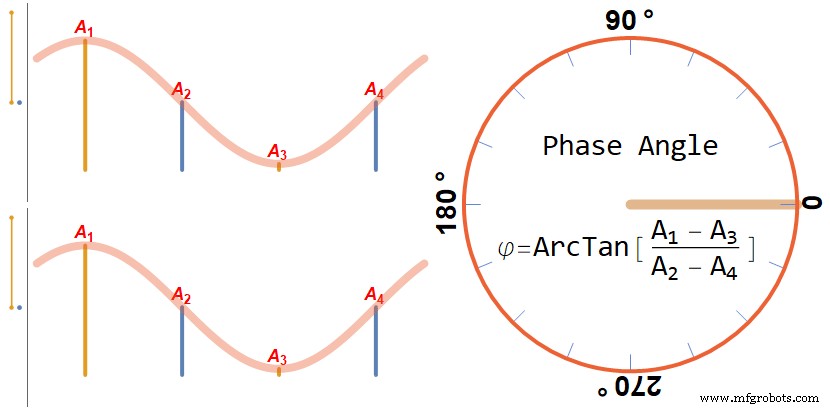
Щелкните диаграмму, чтобы увидеть более сложное изображение, иллюстрирующее различия переменных A 1 , A 2 , А 3 , и A 4 поместиться на единичный круг.
На приведенной выше иллюстрации в дальнем левом углу графика есть две вертикальные числовые линии, которые показывают результат вычитания A 1 и A 3 (представлен темно-желтым) и A 2 и A 4 (обозначено синим цветом). Измеренные значения отображаются в виде вертикальных линий на графиках синусоид посередине.
Обратите внимание, что этот рисунок не учитывает отражение (которое фактически сместило бы все на 180 °).
Определение рабочей частоты для заданного расстояния
Вернемся к нашему примеру, расстояние до цели определяется по формуле:
$$ d =\ frac {c \ cdot \ varphi} {4 \ pi \ cdot f} $$
Где c - скорость света, phi (φ) - фазовый угол (в радианах), а ƒ - частота модуляции.
Для измерения фактического времени пролета фотона требуется электроника с частотой 333 ГГц. Этот метод требует максимальной частоты модуляции в 4 раза, которая в данном случае составляет 4x20 МГц =80 МГц. Это феноменальное сокращение ресурсов. Но вы будете счастливы узнать, что некоторые умные инженеры нашли способ еще больше снизить максимальную частоту.
Определение фазового сдвига путем измерения дифференциального напряжения заряженных конденсаторов
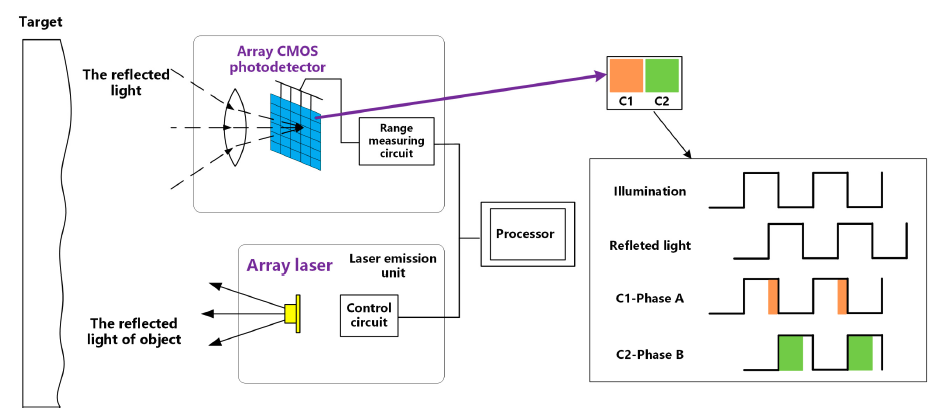
Следующая ситуация измерения включает стробоскопический источник света и датчик изображения CMOS с двумя конденсаторами на пиксель.
Источник тактовых импульсов генерирует прямоугольную волну с коэффициентом заполнения 50%, и эта прямоугольная волна управляет ярким стробирующим источником света, а также подключением к конденсаторам накопления заряда внутри каждого пикселя.
Пример такой системы представлен на изображении ниже:
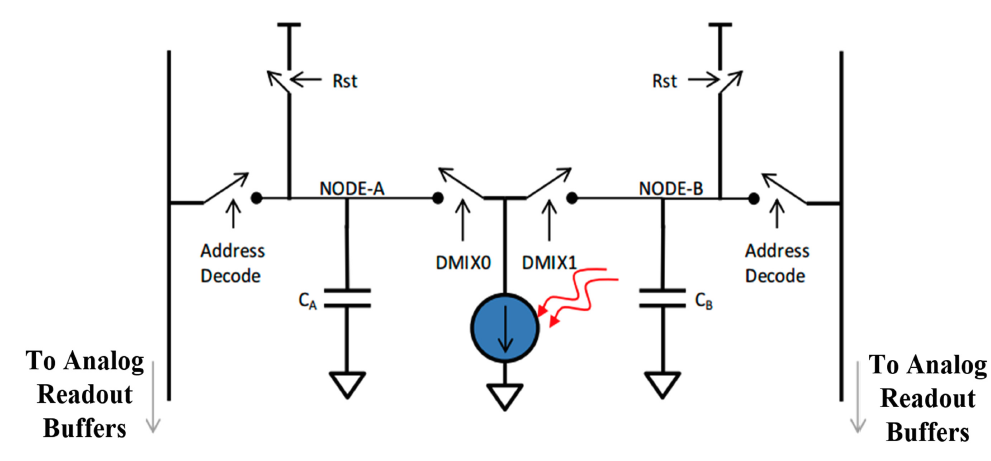
Изображение из «Метод быстрой калибровки твердотельных матричных LiDARS устройства фотонного микширования». Здесь показан пиксель CMOS с двумя конденсаторами для накопления заряда, которые поочередно подключаются для записи входящих свет.
Свет покидает источник, отражается от объекта и попадает в пиксель, где он будет записан как заряд в конденсаторе C A или C B показано выше. Конденсаторы поочередно подключаются к пикселю на той же частоте, что и источник освещения, с использованием того же источника синхронизации.
Эта хитроумная компоновка означает, что дифференциальный заряд конденсаторов напрямую связан с фазовым сдвигом. А фаза определяется длиной волны и расстоянием до цели и обратно.
Изображение из «Метод быстрой калибровки твердотельных матричных LiDARS для фотонного смесителя»
Объект можно освещать столько раз, сколько необходимо для заполнения конденсаторов. Пока расстояние остается постоянным, пропорции заряда остаются прежними
Датчики времени полета в действии
Насколько хорошо работает этот метод? Лучше, чем вы могли ожидать.
Датчик, предоставленный для AAC, в сочетании с сопутствующим программным обеспечением может записывать до 45 кадров в секунду. При более низкой частоте обновления система может легко отобразить морщины на рубашке.

На изображении выше показано расположение вершин (x, y, z) каждого пикселя, захваченного камерой pico flexx pmd.
Данные только о глубине трудно визуализировать сами по себе. Таким образом, изображение глубины часто сочетается с фотографией или отображается с использованием ложных цветов, чтобы облегчить визуализацию сцены.
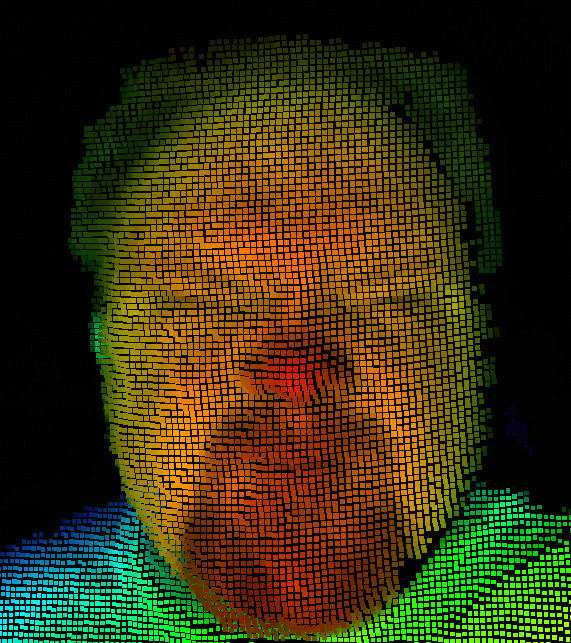
Наложение глубины ложного цвета на изображение с низким разрешением упрощает интерпретацию сцены. Изображение автора goober снято с помощью программного обеспечения PMD Royal Viewer и комплекта разработчика CamBoard pico flexx 3D.
<час />
Датчики времени полета могут использоваться в различных приложениях, включая создание трехмерной карты окружающей среды при сочетании умной физики и инженерии.
Вы когда-нибудь использовали 3D-камеры в своей работе? Что вы можете сказать нам о конструктивных ограничениях использования датчиков времени полета? Поделитесь своим опытом в комментариях ниже.
Промышленные технологии
- Что такое звонки по WiFi? Как это работает?
- Проблемы с людьми:как вы справляетесь?
- Как работают системы SCADA?
- Как работает обнаружение частичного разряда в распределительных устройствах?
- Рабочее оборудование:пришло ли время для обновления?
- Как работает щеточный двигатель постоянного тока
- Как работают датчики уровня Biz4Intellia — их производительность и срок службы
- Как сократить время переналадки с помощью SMED и стандартной работы
- Как работают осушители воздуха?
- Время полета по сравнению с системами FMCW LiDAR