


Selsyn (Synchro) Motors
Обычно обмотки ротора асинхронного двигателя с фазным ротором закорачиваются после запуска. Во время пуска сопротивление может быть включено последовательно с обмотками ротора для ограничения пускового тока. Если эти обмотки подключены к общему пусковому сопротивлению, два ротора будут синхронизированы во время пуска.
Это полезно для печатных машин и подъемных мостов, где два двигателя необходимо синхронизировать во время запуска. После запуска и закорачивания роторов синхронизирующий момент отсутствует. Чем выше сопротивление при пуске, тем выше синхронизирующий момент для пары двигателей.
Если пусковые резисторы удалены, но роторы по-прежнему включены параллельно, пусковой момент отсутствует. Однако существует значительный синхронизирующий момент. Это называется сельсин . , что является аббревиатурой от «самосинхронный».
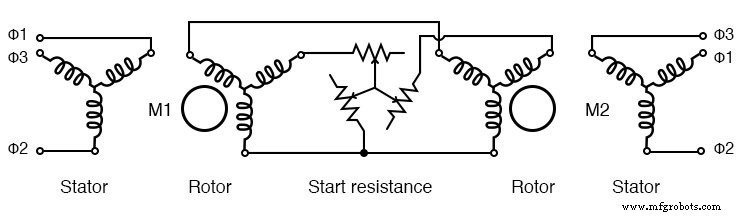
Запуск асинхронных двигателей с ротором от обычных резисторов
Роторы могут быть неподвижными. Если один ротор перемещается на угол θ, вал другого сельсина перемещается на угол θ. Если к одному сельсину приложено сопротивление, это будет ощущаться при попытке повернуть другой вал.
Несмотря на то, что существуют сельсины мощностью в несколько лошадиных сил (несколько киловатт), их основное применение - небольшие блоки мощностью в несколько ватт для измерительных приложений - дистанционная индикация положения.
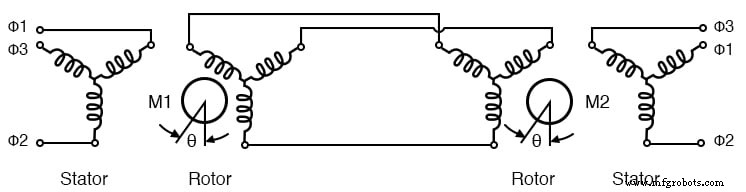
Сельсины без начального сопротивления
В приборных сельсинах не используются пусковые резисторы (рисунок выше). Они не предназначены для самовращения. Поскольку роторы не закорочены и не нагружены резистором, пусковой крутящий момент не создается.
Однако ручное вращение одного вала приведет к дисбалансу токов ротора до тех пор, пока вал параллельного блока не последует за ним. Обратите внимание, что на оба статора подается общий источник трехфазного питания. Хотя выше мы показываем трехфазные роторы, достаточно ротора с однофазным питанием, как показано на рисунке ниже.
Передатчик - Приемник
Малые инструментальные сельсины, также известные как синхронизаторы , использует однофазные параллельные роторы, питаемые переменным током, сохраняя 3-фазные параллельные статоры, которые не имеют внешнего питания. Ниже показаны функции синхронизаторов как вращающихся трансформаторов.
Если роторы обоих преобразователей крутящего момента (TX) и приемник крутящего момента (RX) находятся под одинаковым углом, фазы индуцированных напряжений статора будут одинаковыми для обоих, и ток не будет течь.
Если один ротор смещен относительно другого, фазные напряжения статора будут различаться между передатчиком и приемником. Ток статора будет течь, развивая крутящий момент. Вал приемника электрически подчинен валу передатчика. Вал передатчика или приемника можно повернуть, чтобы повернуть противоположный блок.
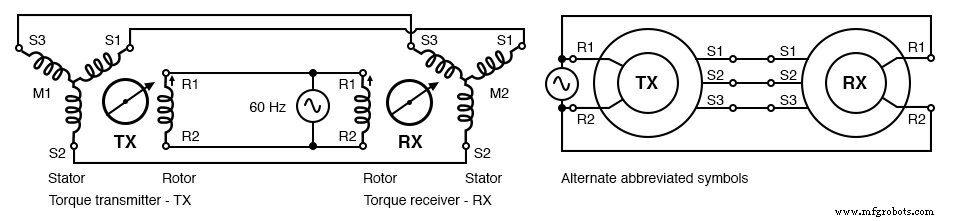
Синхро-синхронизаторы имеют роторы с однофазным приводом
Синхростаторы намотаны с 3-фазными обмотками, выведенными на внешние клеммы. Однороторная обмотка передатчика или приемника крутящего момента выводится с помощью шлифованных контактных колец. Синхронные передатчики и приемники электрически идентичны.
Однако синхронный приемник имеет встроенное инерционное демпфирование. Датчик крутящего момента может быть заменен приемником крутящего момента.
Дистанционное определение положения является основным приложением синхронизатора. Например, синхронный передатчик, соединенный с антенной радара, указывает положение антенны на индикаторе в диспетчерской.
Синхронный передатчик, соединенный с флюгером, показывает направление ветра на удаленной консоли. Доступны синхронизаторы для использования с питанием 240 В переменного тока 50 Гц, 115 В переменного тока 60 Гц, 115 В переменного тока 400 Гц и 26 В переменного тока 400 Гц.
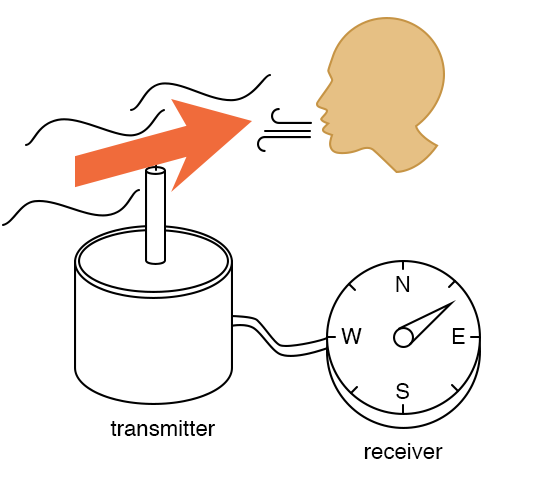
Приложение Synchro:дистанционная индикация положения
Дифференциальный приемопередатчик
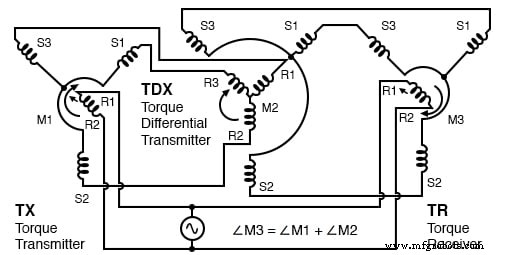
синхронно-дифференциальный передатчик (TDX) имеет как трехфазный ротор, так и статор. Синхро-дифференциальный преобразователь добавляет входной угол вала к входному электрическому углу на входах ротора, выводя сумму на выходах статора.
Этот электрический угол статора можно отобразить, отправив его на приемник. Например, синхронный приемник отображает положение антенны радара относительно носа корабля. Добавление направления судового компаса с помощью синхронно-дифференциального передатчика отображает положение антенны на приемнике относительно истинного севера, независимо от курса судна.
Если поменять местами пару выводов статора S1-S3 между TX и TDX, вычитаются угловые положения.
Датчик дифференциала крутящего момента (TDX)
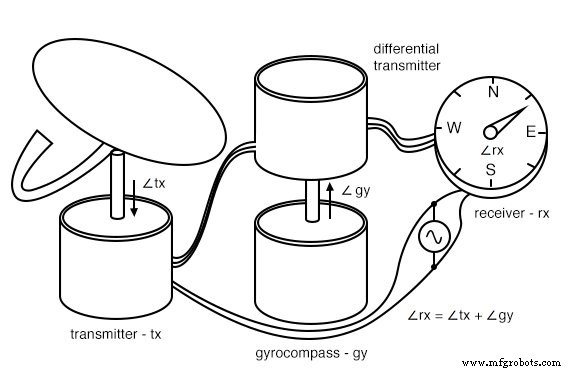
Антенна судового радара, соединенная с синхронным передатчиком, кодирует угол антенны относительно носа судна (рисунок ниже). Желательно отображать положение антенны относительно истинного севера.
Нам нужно добавить корабли, идущие от гирокомпаса, к положению антенны по отношению к носу, чтобы отобразить угол антенны относительно истинного севера (антенна + ∠гироскоп).
Применение датчика дифференциала крутящего момента:сложение углов
∠antenna-N =∠antenna + ∠gyro ∠rx =∠tx + ∠gy
Например, курс судна ∠30 °, положение антенны относительно носа судна 0 °, antenna-N:
∠rx =∠tx + ∠gy ∠30 ° =∠30 ° + ∠0 °
Пример:курс судна 30 °, положение антенны относительно носа судна 15 °, antenna-N:
∠45 ° =∠30 ° + ∠15 °
Сложение против вычитания
Для справки мы показываем электрические схемы для вычитания и сложения углов вала с использованием как TDX (передатчик дифференциала крутящего момента), так и TDR (приемника дифференциала крутящего момента). TDX имеет входной угол крутящего момента на валу, электрический угловой вход на трех соединениях статора и электрический угловой выход на трехроторных соединениях.
TDR имеет электрические угловые входы как на статоре, так и на роторе. Выходной угол - это крутящий момент на валу TDR. Разница между TDX и TDR заключается в том, что TDX является датчиком крутящего момента, а TDR - приемником крутящего момента.
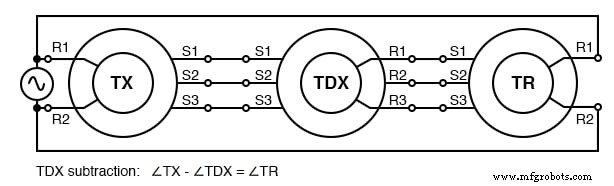
Вычитание TDX
Входы крутящего момента - TX и TDX. Угловая разница крутящего момента на выходе составляет TR.
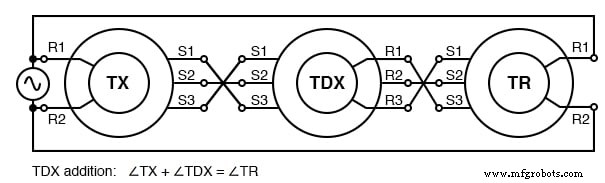
Добавление TDX
Входы крутящего момента - TX и TDX. Угловая сумма выходного крутящего момента равна TR.
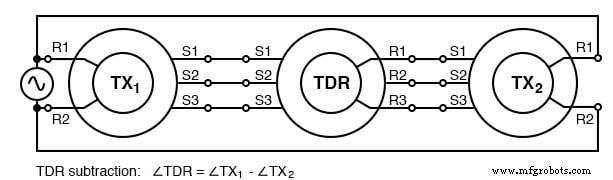
Вычитание TDR
Входы крутящего момента:TX 1 и TX 2 . Угловая разница выходного крутящего момента - TDR.
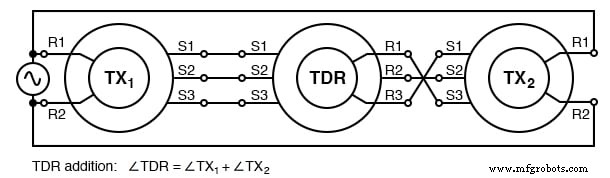
Добавление TDR
Входы крутящего момента - TX 1 и TX 2 . Угловая сумма выходного крутящего момента равна TDR.
Управляющий трансформатор
Разновидностью синхронного передатчика является управляющий трансформатор . . Он имеет три равноотстоящих обмотки статора, как и TX. Его ротор намотан с большим числом оборотов, чем передатчик или приемник, чтобы сделать его более чувствительным при обнаружении нуля при вращении, обычно с помощью сервопривода . система.
Выход ротора CT (управляющий трансформатор) равен нулю, когда он ориентирован под прямым углом к вектору магнитного поля статора. В отличие от TX или RX, CT не передает и не принимает крутящий момент. Это просто чувствительный датчик углового положения.
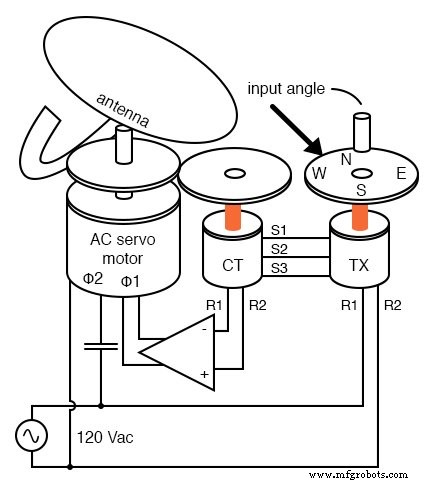
Управляющий трансформатор (CT) обнаруживает нулевой серво
На рисунке выше вал передатчика установлен в желаемое положение антенны радара. Сервосистема заставит серводвигатель привести антенну в заданное положение. CT сравнивает заданное положение с фактическим положением и подает сигнал сервоусилителю, чтобы он приводил двигатель в действие, пока не будет достигнут заданный угол.
Сервопривод использует CT для определения нулевого положения антенны
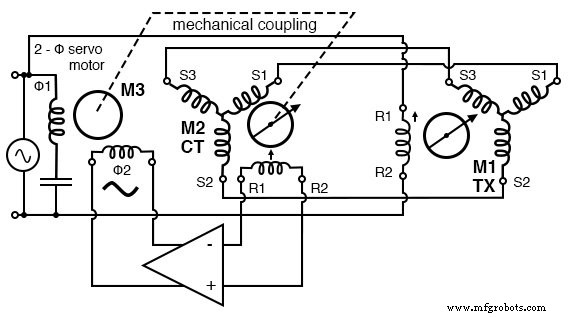
Когда ротор управляющего трансформатора обнаруживает ноль при 90 ° к оси поля статора выход ротора отсутствует. Любое смещение ротора вызывает ошибку переменного напряжения, пропорциональную смещению.
серво стремится минимизировать ошибку между заданной и измеряемой переменной из-за отрицательной обратной связи. Управляющий трансформатор сравнивает угол вала с углом магнитного поля статора, передаваемым статором TX.
Когда он измеряет минимум или ноль, сервопривод приводит антенну и ротор управляющего трансформатора в заданное положение. Нет ошибки между измеренным и заданным положением, нет выхода CT для усиления.
серводвигатель , двухфазный двигатель, перестает вращаться. Однако любая обнаруженная ошибка CT приводит в действие усилитель, который приводит в действие двигатель, пока ошибка не будет минимизирована. Это соответствует сервосистеме, в которой ТТ с антенной связью приводится в действие в соответствии с углом, заданным передатчиком.
Серводвигатель может приводить в движение редукторную передачу и быть большим по сравнению с синхронизаторами TX и CT. Однако низкий КПД серводвигателей переменного тока ограничивает их работу с меньшими нагрузками. Их также трудно контролировать, поскольку они представляют собой устройства с постоянной скоростью.
Однако ими можно до некоторой степени управлять, изменяя напряжение на одной фазе с линейным напряжением на другой фазе. Большие нагрузки более эффективно приводятся в движение большими серводвигателями постоянного тока.
В бортовых приложениях используются компоненты с частотой 400 Гц - TX, CT и серводвигатель. Размер и вес магнитных компонентов переменного тока обратно пропорциональны частоте. Таким образом, использование компонентов с частотой 400 Гц для авиационных приложений, таких как движущиеся поверхности управления, позволяет сэкономить на размере и весе.
Резолвер
преобразователь (рисунок ниже) имеет две обмотки статора, расположенные под углом 90 ° друг к другу, и одна обмотка ротора, управляемая переменным током. Резольвер используется для преобразования полярных значений в прямоугольные. Угловой ввод на валу ротора создает прямоугольные координаты sinθ и cosθ, пропорциональные напряжениям на обмотках статора.
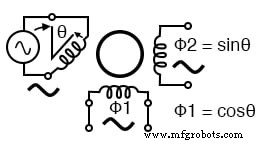
Resolver преобразует угол вала в синус и косинус угла
Например, черный ящик в радаре кодирует расстояние до цели как напряжение V, пропорциональное синусоиде, а угол пеленга - как угол вала. Преобразовать в координаты X и Y. Синусоидальная волна подается на ротор резольвера. Угловой вал с подшипником соединен с валом резольвера. Координаты (X, Y) доступны на обмотках статора резольвера:
X =V (cos (подшипник)) Y =V (sin (подшипник))
Декартовы координаты (X, Y) могут быть нанесены на карту. TX (датчик крутящего момента) может быть адаптирован для работы в качестве резольвера.

Скотт-Т преобразует 3-φ в 2-φ, позволяя TX выполнять функцию преобразователя
Можно получить квадратурные угловые компоненты, подобные резольверу, из синхронного передатчика с помощью Scott-T трансформатор. Три выхода TX, 3 фазы, обрабатываются Scott-T преобразователь в пару квадратурных составляющих. Существует также линейная версия резольвера, известная как индуктосин. Поворотная версия индуктосина имеет более высокое разрешение, чем преобразователь.
Резюме:Selsyn (синхронные) двигатели
- синхронно , также известный как сельсин , представляет собой вращающийся трансформатор, используемый для передачи крутящего момента на валу.
- TX, датчик крутящего момента , принимает крутящий момент на своем валу для передачи на трехфазные электрические выходы.
- RX, приемник крутящего момента , принимает трехфазное электрическое представление углового входа для преобразования в выходной крутящий момент на его валу. Таким образом, TX передает крутящий момент от входного вала на удаленный выходной вал RX.
- TDX, датчик перепада крутящего момента , суммирует входной электрический угол с входным углом вала, создавая выходной электрический угол.
- TDR, дифференциальный приемник крутящего момента, суммирует два входных электрического угла, производя выходной угол вала.
- ТТ, управляющий трансформатор , обнаруживает ноль, когда ротор расположен под прямым углом к входному углу статора. ТТ обычно является компонентом серво-системы обратной связи.
- распознаватель выводит квадратурное представление sin (θ) и cos (θ) входного угла вала вместо трехфазного выхода.
- Трехфазный выход TX преобразуется в выходной сигнал в стиле резольвера с помощью трансформатора Скотта-Т .
Промышленные технологии
- Однофазные асинхронные двигатели
- Коллекторные двигатели переменного тока
- Технический совет:двигатели
- Приводы и двигатели в автомобильных испытательных стендах
- Преимущества двигателей с жидкостным охлаждением
- Угольные щетки в двигателях постоянного тока:использование, распространенные неисправности и многое другое…
- Безопасность электродвигателя:различные фазы и меры безопасности
- 7 шагов к улучшению технического обслуживания электродвигателей
- 4 основных вида отказов обмотки в электродвигателях переменного тока
- Электродвигатели постоянного и переменного тока:в чем их отличия?