


Двигатель сопротивления
электродвигатель с переменным сопротивлением основан на том принципе, что неограниченный кусок железа будет двигаться, чтобы завершить путь магнитного потока с минимальным сопротивлением , магнитный аналог электрического сопротивления.
Синхронное сопротивление
Если вращающееся поле большого синхронного двигателя с явными полюсами обесточено, он все равно будет развивать 10 или 15% синхронного крутящего момента. Это связано с переменным сопротивлением во время оборота ротора. Большой синхронный реактивный двигатель не имеет практического применения. Однако он практичен в небольших размерах.
Если в безпроводном роторе асинхронного двигателя прорезаны пазы, соответствующие пазам статора, синхронный реактивный двигатель результаты.
Он запускается как асинхронный двигатель, но работает с небольшим синхронным крутящим моментом. Синхронный крутящий момент возникает из-за изменения магнитного сопротивления магнитного пути от статора через ротор по мере совмещения пазов.
Этот двигатель является недорогим средством развития умеренного синхронного крутящего момента. Низкий коэффициент мощности, низкий крутящий момент и низкий КПД являются характеристиками электродвигателя с регулируемым магнитным сопротивлением с прямым приводом от линии электропередачи. Таково было состояние электродвигателя с регулируемым сопротивлением за столетие до развития полупроводникового регулятора мощности.
Переключаемое сопротивление
Если железный ротор с полюсами, но без каких-либо проводов, установлен на многофазный статор, реактивный электродвигатель , способный синхронизироваться с полем статора, результаты. Когда пара полюсов обмотки статора находится под напряжением, ротор перемещается по пути с наименьшим магнитным сопротивлением (рисунок ниже).
Импульсный реактивный двигатель также известен как реактивный электродвигатель с регулируемым сопротивлением. Сопротивление ротора потоку потока статора зависит от его положения.
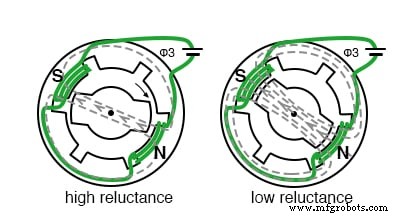
Сопротивление - это функция положения ротора в двигателе с переменным сопротивлением
Последовательное переключение (рисунок ниже) фаз статора перемещает ротор из одного положения в другое. Магнитный поток ищет путь наименьшего сопротивления. Ниже приведен упрощенный ротор и кривые, иллюстрирующие его работу.
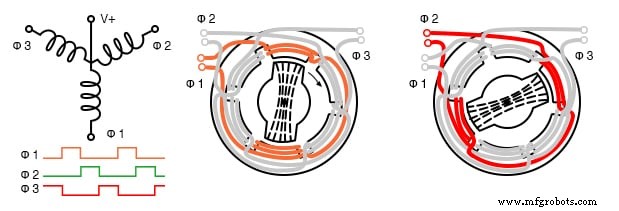
Электродвигатель с регулируемым сопротивлением, чрезмерно упрощенное управление
Если один конец каждой трехфазной обмотки вентильного реактивного электродвигателя выведен через общий подводящий провод, мы можем объяснить работу так, как если бы это был шаговый электродвигатель (рисунок выше). Остальные соединения катушек последовательно замыкаются на землю, по очереди, в волновом двигателе . шаблон. Это притягивает ротор к вращающемуся по часовой стрелке магнитному полю под углом 60 ° . приращения.
Электродвигатели с переменным сопротивлением могут работать с различными формами сигналов (рисунок ниже). Волновой привод (а) прост, требует только однополярный однополярный переключатель. Это тот, который переключается только в одном направлении. Биполярный привод (b) обеспечивает больший крутящий момент, но требует биполярного переключателя.
Драйвер питания должен тянуть попеременно высокий и низкий. Формы сигналов (a и b) применимы к версии шагового двигателя переменного реактивного сопротивления. Для плавной работы без вибраций желательно и легко сгенерировать 6-ступенчатое приближение синусоидальной волны (c).
Привод синусоидальной волны (d) может генерироваться широтно-импульсным модулятором (ШИМ) или выводиться из линии электропередачи.
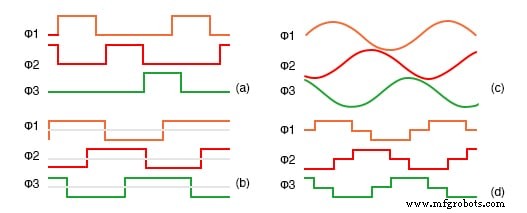
Формы сигналов привода электродвигателя с переменным сопротивлением:(a) однополярный волновой привод, (b) биполярный полный шаг (c) синусоида (d) биполярный 6-ступенчатый сигнал
Удвоение количества полюсов статора снижает скорость вращения и увеличивает крутящий момент. Это может исключить редукторный привод. Двигатель с переменным сопротивлением, предназначенный для дискретного движения, остановки и пуска, представляет собой шаговый двигатель с переменным сопротивлением .
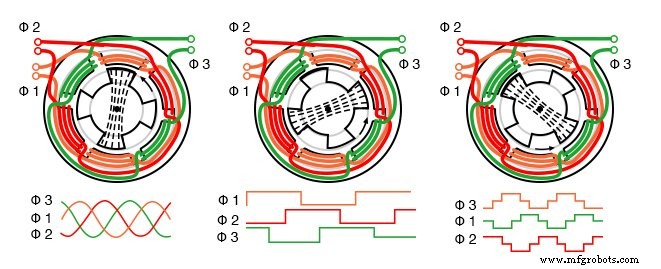
Если целью является плавное вращение, существует версия реактивного реактивного двигателя с электронным приводом. В электродвигателях с регулируемым сопротивлением или шаговых двигателях на самом деле используются роторы, подобные показанным на рисунке ниже.
Электродвигатель с регулируемым сопротивлением и электронным управлением
Электродвигатели с регулируемым сопротивлением плохо работают, когда приводится в действие прямая линия электропередачи. Однако микропроцессоры и твердотельный привод делают этот двигатель экономичным и высокопроизводительным решением для некоторых приложений с большими объемами.
Хотя этот мотор трудно контролировать, его легко вращать. Последовательное переключение катушек возбуждения создает вращающееся магнитное поле, которое увлекает за собой ротор неправильной формы, ища путь с наименьшим магнитным сопротивлением.
Взаимосвязь между крутящим моментом и током статора очень нелинейна, и ее трудно контролировать.
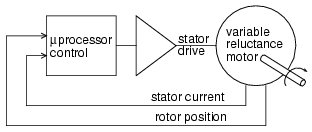
Электродвигатель с регулируемым сопротивлением с электронным управлением
Электродвигатель с регулируемым магнитным сопротивлением с электронным приводом (рисунок ниже) напоминает бесщеточный электродвигатель постоянного тока без ротора с постоянными магнитами. Это делает мотор простым и недорогим. Однако это компенсируется стоимостью электронного управления, которое не так просто, как для бесщеточного двигателя постоянного тока.
Хотя электродвигатель с регулируемым сопротивлением является более простым, чем асинхронный электродвигатель, его трудно контролировать. Электронное управление решает эту проблему и позволяет приводить двигатель в действие значительно выше и ниже частоты сети. Электродвигатель с регулируемым сопротивлением, приводимый в действие сервоприводом . , электронная система обратной связи, контролирует крутящий момент и скорость, сводя к минимуму пульсации крутящего момента.
Электродвигатель с регулируемым сопротивлением с электронным управлением
Это противоположно высокому крутящему моменту пульсации, необходимому для шаговых двигателей. Вместо шагового двигателя двигатель с регулируемым сопротивлением оптимизирован для непрерывного высокоскоростного вращения с минимальным крутящим моментом пульсаций.
Необходимо измерить положение ротора с помощью датчика положения вращения, такого как оптический или магнитный энкодер, или получить это, отслеживая обратную ЭДС статора. Микропроцессор выполняет сложные вычисления для своевременного переключения обмоток с помощью твердотельных устройств.
Это необходимо делать точно, чтобы свести к минимуму слышимый шум и пульсацию крутящего момента. Для минимального пульсационного момента необходимо контролировать и контролировать ток обмотки.
Строгие требования к приводам делают этот двигатель практичным только для приложений с большими объемами, таких как энергоэффективные двигатели пылесосов, двигатели вентиляторов или двигатели насосов. В одном из таких пылесосов используется компактный высокоэффективный вентиляторный двигатель с электронным приводом на 100 000 об / мин.
Простота двигателя компенсирует стоимость приводной электроники. Отсутствие щеток, коммутатора, обмоток ротора и постоянных магнитов упрощает производство двигателей.
КПД этого двигателя с электронным приводом может быть высоким. Но это требует значительной оптимизации с использованием специальных методов проектирования, что оправдано только для больших объемов производства.
Преимущества
- Простая конструкция - без щеток, коммутатора, постоянных магнитов, без меди или алюминия в роторе.
- Высокая эффективность и надежность по сравнению с обычными двигателями переменного или постоянного тока.
- Высокий пусковой крутящий момент.
- Рентабельность по сравнению с бесщеточным двигателем постоянного тока в больших объемах.
- Возможность адаптации к очень высокой температуре окружающей среды.
- Недорогое точное регулирование скорости возможно при достаточно высоком уровне громкости.
Недостатки
- Зависимость тока от крутящего момента очень нелинейна.
- Фазовое переключение должно быть точным, чтобы минимизировать пульсации крутящего момента.
- Фазный ток необходимо контролировать, чтобы минимизировать пульсации крутящего момента.
- Акустический и электрический шум.
- Неприменимо к небольшим объемам из-за сложных проблем управления.
Промышленные технологии
- Потенциометр как реостат
- Однофазные асинхронные двигатели
- Коллекторные двигатели переменного тока
- для ремонта двигателя постоянного тока с ЧПУ
- Прототип Raspoulette
- Расчет двигателя и приводной системы
- Как проверить двигатель постоянного тока
- Что такое линейный двигатель?
- Что такое серводвигатель?
- Интеграция бескаркасного двигателя