


Регистры сдвига:преобразование последовательного входа и параллельного выхода (SIPO)
Регистр сдвига с последовательным входом и параллельным выходом аналогичен регистру сдвига с последовательным входом и выходом в том смысле, что он сдвигает данные во внутренние элементы памяти и смещает данные на последовательном выходе, выходе данных, контакте.
Он отличается тем, что делает все внутренние этапы доступными в качестве выходов. Следовательно, регистр сдвига с последовательным входом и параллельным выходом преобразует данные из последовательного формата в параллельный формат.
Пример использования регистров сдвига с последовательным входом и параллельным выходом
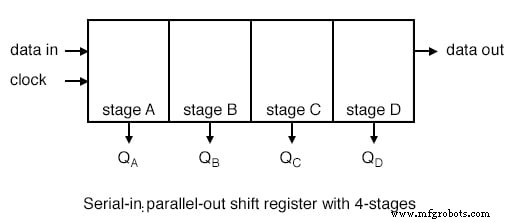
Если четыре бита данных сдвигаются на четыре тактовых импульса по одному проводу при вводе данных, как показано ниже, данные становятся доступными одновременно на четырех выходах Q A кому:Q D после четвертого тактового импульса.
Практическое применение регистра сдвига с последовательным входом и параллельным выходом заключается в преобразовании данных из последовательного формата по одному проводу в параллельный формат по нескольким проводам.
Зажигаем четыре светодиода (светоизлучающие диоды) с четырьмя выходами ( Q A Q B Q C Q D ).
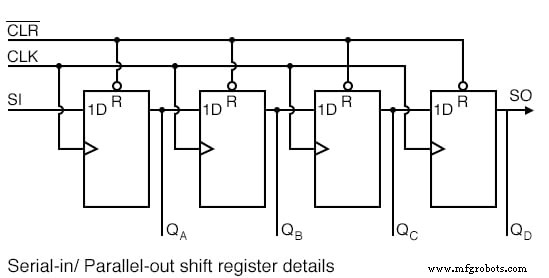
Приведенные выше детали регистра сдвига с последовательным входом и параллельным выходом довольно просты. Он выглядит как регистр сдвига с последовательным входом и выходом с отводами, добавленными к каждому выходу каскада.
Последовательные данные переходят в SI (Последовательный ввод). После количества тактов, равного количеству стадий, первый бит данных появляется в SO (Q D ) на рисунке выше.
В общем, пина SO нет. Последний этап (Q D выше) служит SO и каскадно передается следующему пакету, если он существует.
Сдвиговый регистр последовательного входа, параллельного выхода и последовательного входа и выхода
Если регистр сдвига с последовательным входом и параллельным выходом так похож на регистр сдвига с последовательным входом и выходом, почему производители предлагают оба типа?
Почему бы просто не предложить регистр сдвига с последовательным входом и параллельным выходом?
Ответ заключается в том, что на самом деле они предлагают только регистр сдвига с последовательным входом и параллельным выходом, если он имеет не более 8 бит.
Обратите внимание, что регистры сдвига с последовательным входом и выходом имеют длину более 8 бит, от 18 до 64 бит.
Непрактично предлагать 64-битный регистр сдвига с последовательным входом и параллельным выходом, требующий такого количества выходных контактов. См. Приведенные ниже формы сигналов для вышеуказанного регистра сдвига.
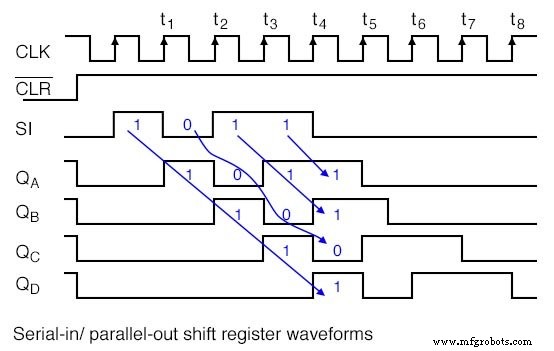
Регистр сдвига был очищен перед любыми данными с помощью CLR ’ , активный низкий сигнал, который очищает все триггеры типа D в регистре сдвига.
Обратите внимание на серийные данные 1011 шаблон представлен в SI Вход. Эти данные синхронизируются с часами CLK . .
Это было бы так, если бы он был сдвинут из чего-то вроде другого сдвигового регистра, например, сдвигового регистра с параллельным входом и последовательным выходом (здесь не показан).
В первые часы в t1 , данные 1 в SI сдвигается с D на Q первого каскада регистра сдвига. После t2 этот первый бит данных находится в Q B .
После t3 это в Q C . После t4 это в Q D . Четыре тактовых импульса полностью сдвинули первый бит данных до последней ступени Q D .
Второй бит данных - 0 находится в Q C после 4-х часов. Третий бит данных - 1 находится в Q B . Четвертые данные бит другого 1 находится в Q A .
Таким образом, шаблон последовательного ввода данных 1011 содержится в ( Q D Q C Q B Q A ). Теперь он доступен на четырех выходах.
Он будет доступен на четырех выходах сразу после часов t 4 как раз перед t 5 .
Эти параллельные данные должны использоваться или сохраняться между этими двумя моментами времени, иначе они будут потеряны из-за смещения Q D stage на следующих часах t 5 до t 8 как показано выше.
Устройства с последовательным входом и параллельным выходом
Давайте подробнее рассмотрим регистры сдвига с последовательным входом и параллельным выходом, доступные в виде интегральных схем, любезно предоставленные Texas Instruments.
Чтобы ознакомиться с полными техническими характеристиками устройства, перейдите по ссылкам.
- SN74ALS164A 8-битный регистр сдвига с последовательным входом / параллельным выходом
- SN74AHC594 8-битный регистр сдвига с последовательным входом / параллельным выходом и выходным регистром
- SN74AHC595 8-битный регистр сдвига с последовательным входом / параллельным выходом и выходным регистром
- CD4094 8-разрядный регистр сдвига с последовательным входом / параллельным выходом и выходным регистром.
74ALS164A почти идентичен нашей предыдущей схеме, за исключением двух последовательных входов A . и B .
Неиспользуемый вход следует подтянуть высоко, чтобы включить другой вход. Мы не показываем все вышеперечисленные этапы.
Однако все выходы показаны ниже на символе ANSI вместе с номерами контактов.
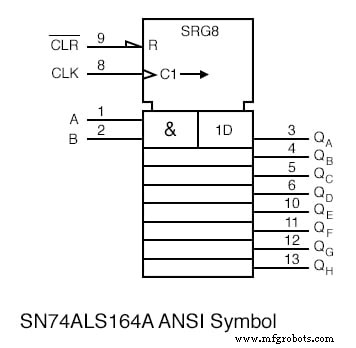
CLK вход в секцию управления вышеуказанного символа ANSI имеет две внутренние функции C1 , управление чем угодно с префиксом 1 .
Это будет учет данных в 1D . Вторая функция, стрелка после косой черты (/), - это сдвиг вправо (вниз) данных в регистре сдвига.
Восемь выходов доступны справа от восьми регистров под секцией управления. Первая ступень шире остальных, чтобы разместить A&B ввод.
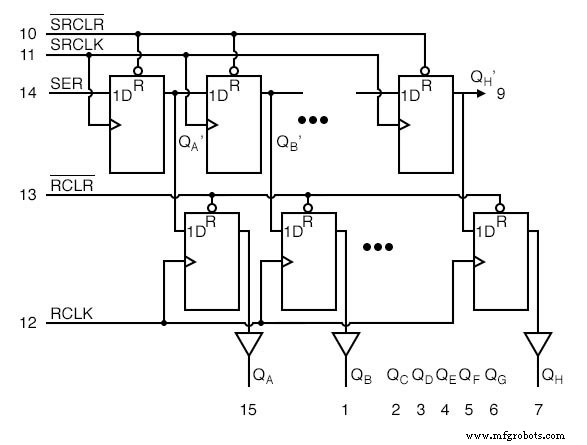
Приведенная выше внутренняя логическая схема адаптирована из таблицы данных TI (Texas Instruments) для 74AHC594. FF типа «D» в верхнем ряду содержат регистр сдвига с последовательным входом и параллельным выходом.
Этот раздел работает аналогично описанным ранее устройствам. Выходы ( Q A ’Q B ’ в Q H ’ ) половины регистра сдвига устройства параллельно подают ФФ типа «D» в нижнюю половину. Q H ’ (вывод 9) перемещается в любой дополнительный каскадный пакет устройств.
Один положительный фронт тактовой частоты на RCLK передает данные из D . на Q нижних ФФ. Все 8-битные данные передаются параллельно выходному регистру (набор элементов хранения).
Назначение выходного регистра - поддерживать постоянный вывод данных, пока новые данные перемещаются в верхнюю секцию регистра сдвига.
Это необходимо, если выходы управляют реле, клапанами, двигателями, соленоидами, звуковыми сигналами или зуммером. Эта функция может не понадобиться при включении светодиодов, если мерцание при переключении передач не является проблемой.
Обратите внимание, что 74AHC594 имеет отдельные часы для регистра сдвига ( SRCLK ) и выходной регистр ( RCLK ). Кроме того, переключатель можно сбросить с помощью SRCLR . а выходной регистр - RCLR .
Желательно перевести выходы в известное состояние при включении питания, в частности, если приводятся в действие реле, двигатели и т. Д. Формы сигналов ниже иллюстрируют смещение и фиксацию данных.
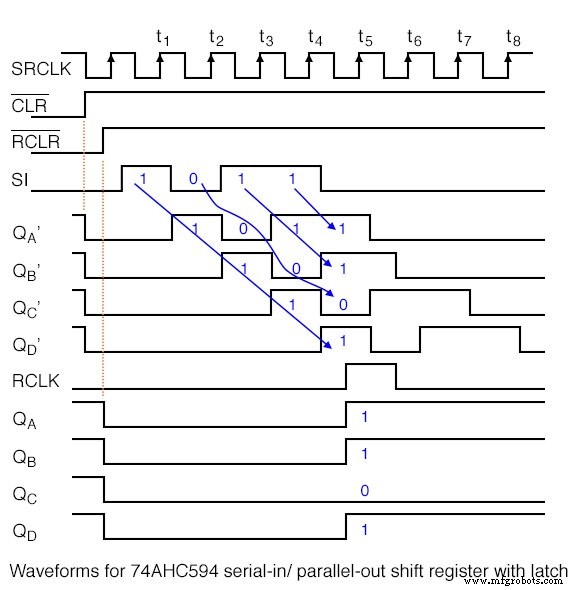
Приведенные выше осциллограммы показывают сдвиг 4-битных данных в первые четыре каскада 74AHC594, а затем параллельную передачу в выходной регистр.
На самом деле 74AHC594 представляет собой 8-битный регистр сдвига, и для сдвига 8-битных данных потребуется 8 тактов, что было бы нормальным режимом работы.
Однако показанные нами 4 бита экономят место и адекватно иллюстрируют работу.
Мы очищаем регистр сдвига за пол-такта до t 0 с SRCLR ’=0 . SRCLR ’ перед переключением необходимо отпустить обратно вверх.
Непосредственно перед t 0 выходной регистр очищается с помощью RCLR ’=0 . Он тоже выпущен ( RCLR ’=1 ).
Серийные данные 1011 отображается на выводе SI между тактами t 0 и t 4 . Сдвигается на часы t 1 t 2 t 3 t 4 появляющиеся на этапах внутренней смены Q A ’Q B ’Q C ’Q D ’ .
Эти данные присутствуют на этих этапах между t 4 и t 5 . После t 5 желаемые данные ( 1011 ) будет недоступен на этих ступенях внутреннего переключателя.
Между t 4 и t 5 мы применяем положительное действие RCLK передача данных 1011 для регистрации выходов Q A Q B Q C Q D .
Эти данные будут заморожены здесь как другие ( 0 s) смещается во время следующего SRCLK s ( t 5 до t 8 ). Здесь данные не будут изменены до следующего RCLK . применяется.
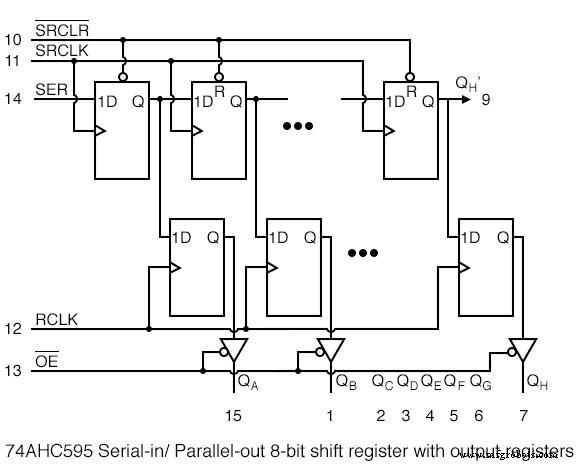
74AHC595 идентичен ‘594, за исключением того, что RCLR’ заменяется на OE ’ включение буфера с тремя состояниями на выходе каждого из восьми битов выходного регистра.
Хотя выходной регистр не может быть очищен, выходы могут быть отключены при OE ’=1 .
Это позволит внешним подтягивающим или понижающим резисторам переводить любые реле, соленоиды или приводы клапанов в известное состояние во время включения системы.
После того, как система включена и, скажем, микропроцессор сдвинул и зафиксировал данные в «595», можно было бы подтвердить разрешение вывода ( OE ’=0 ) для управления реле, соленоидами и клапанами с действительными данными, но не ранее этого времени.
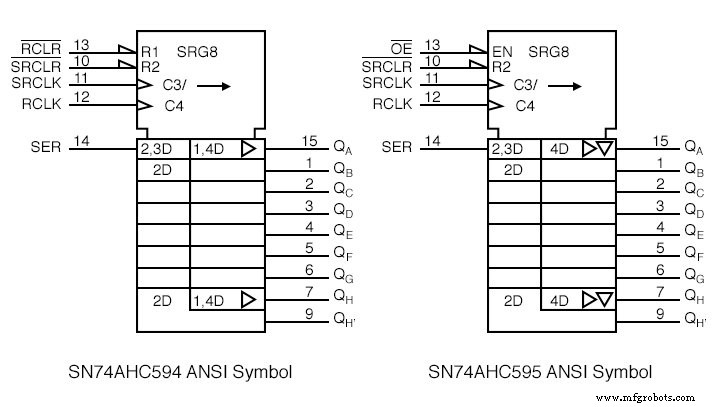
Выше представлены предлагаемые символы ANSI для этих устройств. C3 синхронизирует данные с последовательным входом (внешний SER ), как указано в 3 префикс 2,3D .
Стрелка после C3 / указывает сдвиг вправо (вниз) регистра сдвига, 8 ступеней слева от символа «595» под секцией управления.
2 префикс 2,3D и 2D указывает, что эти этапы можно сбросить с помощью R2 (внешний SRCLR ’ ).
1 префикс 1,4D на ‘594 указывает, что R1 (внешний RCLR ’ ) может сбросить выходной регистр, который находится справа от секции регистра сдвига.
‘595 , у которого есть EN у внешнего OE ’ не может сбросить выходной регистр. Но EN включает буферы вывода с тремя состояниями (перевернутый треугольник).
Правый указывающий треугольник обеих кнопок ‘594 и ‘595 указывает на внутреннюю буферизацию. И ‘594 и ‘595 выходные регистры синхронизируются C4, как показано 4 из 1,4D и 4D соответственно.
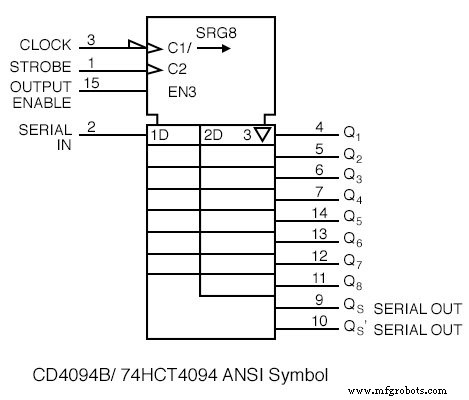
CD4094B - это напряжение от 3 до 15 В DC с возможностью фиксации сдвигового регистра, альтернатива предыдущим устройствам 74AHC594.
ЧАСЫ , C 1, сдвигает данные в SERIAL IN как подразумевается в 1 префикс 1D .
Это также часы правого сдвигового регистра сдвига (левая половина тела символа), как обозначено / (стрелка вправо) в C1 . / (стрелка) у ЧАСЫ ввод.
СТРОБ , C2 это часы для 8-битного выходного регистра справа от тела символа. 2 из 2D указывает, что C2 это часы для выходного регистра.
Перевернутый треугольник на защелке выхода указывает на то, что выход установлен в трехкратный режим и включен с помощью EN3 . .
3 перед перевернутым треугольником и 3 из EN3 часто опускаются, так как любые разрешающие ( EN ) понимается для управления выходами с тремя состояниями. Q S и Q S ’ являются 2-тактными выходами каскада сдвигового регистра.
Q S можно каскадировать на SERIAL IN следующего устройства.
Практическое применение
В реальной жизни регистр сдвига с последовательным входом и параллельным выходом предназначен для вывода данных с микропроцессора на индикатор удаленной панели.
Или другое удаленное устройство вывода, которое принимает данные в последовательном формате.
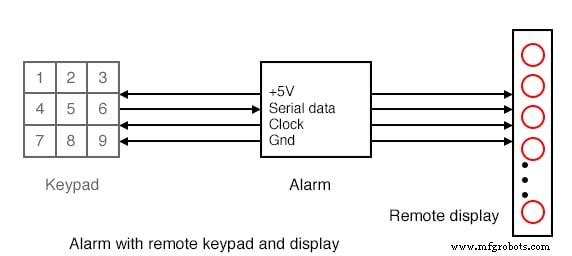
Рисунок «Тревога с удаленной клавиатурой» повторяется здесь из секции параллельного входа и последовательного выхода с добавлением удаленного дисплея.
Таким образом, мы можем отображать, например, состояние шлейфов сигнализации, подключенных к основному блоку сигнализации.
Если аварийный сигнал обнаруживает открытое окно, он может отправить последовательные данные на удаленный дисплей, чтобы сообщить нам об этом.
И клавиатура, и дисплей, скорее всего, будут находиться в одном удаленном корпусе, отдельно от основного блока сигнализации. Однако в этом разделе мы рассмотрим только панель дисплея.
Если бы дисплей находился на той же плате, что и сигнализация, мы могли бы просто проложить восемь проводов к восьми светодиодам, а также два провода для питания и заземления.
Эти восемь проводов гораздо менее желательны при длительной работе с удаленной панелью. Используя регистры сдвига, нам нужно запустить только пять проводов:часы, последовательные данные, стробоскоп, питание и заземление.
Если бы панель находилась всего в нескольких дюймах от основной платы, было бы желательно сократить количество проводов в соединительном кабеле для повышения надежности.
Кроме того, мы иногда используем большую часть доступных контактов микропроцессора, и нам необходимо использовать последовательные методы для увеличения количества выходов.
Некоторые устройства вывода на интегральных схемах, такие как цифро-аналоговые преобразователи, содержат регистры сдвига с последовательным входом и параллельным выходом для приема данных от микропроцессоров.
Проиллюстрированные здесь методы применимы к этим частям.
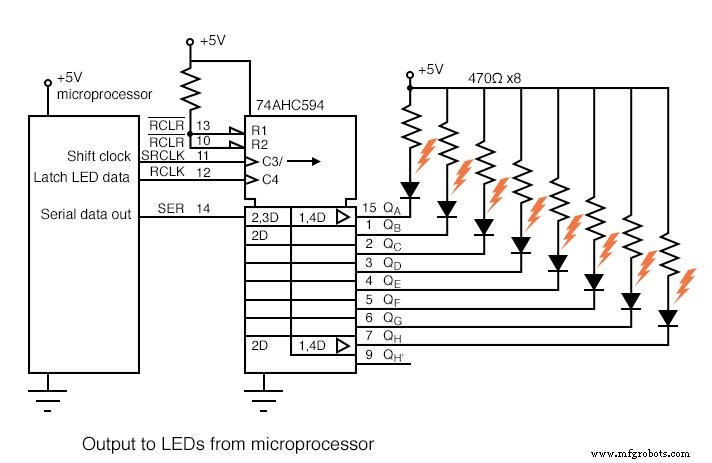
Мы выбрали регистр сдвига с последовательным входом и параллельным выходом 74AHC594 с выходным регистром; однако для этого требуется дополнительный вывод RCLK для параллельной загрузки сдвинутых данных на выходные контакты.
Этот дополнительный вывод предотвращает изменение выходных сигналов во время передачи данных. Это не проблема для светодиодов. Но это будет проблемой, если приводные реле, клапаны, двигатели и т. Д.
Код, выполняемый в микропроцессоре, будет начинаться с 8-битных данных, которые должны быть выведены. Один бит будет выводиться на вывод «Serial data out», управляя SER пульта 74AHC594.
Затем микропроцессор генерирует переход от низкого уровня к высокому на «Shift clock», управляя SRCLK сдвигового регистра '595
Эти положительные часы сдвигают бит данных на SER . от «D» до «Q» первого каскада регистра сдвига.
Это не влияет на Q A Светодиод в это время из-за внутреннего 8-битного выходного регистра между регистром сдвига и выходными контактами ( Q A в Q H ).
Наконец, микропроцессор понижает значение «Shift Clock». На этом сдвиг одного бита в «595» завершен.
Вышеупомянутая процедура повторяется еще семь раз, чтобы завершить сдвиг 8-битных данных из микропроцессора в регистр сдвига с последовательным входом и параллельным выходом 74AHC594.
Для передачи 8-битных данных из внутреннего регистра сдвига 595 на выход требуется, чтобы микропроцессор генерировал переход от низкого уровня к высокому на RCLK . , часы выходного регистра.
Это применяет новые данные к светодиодам. RCLK необходимо вернуть низкий уровень в ожидании следующей 8-битной передачи данных.
Данные, представленные на выходе «595», останутся до тех пор, пока процесс, описанный в двух вышеупомянутых абзацах, не будет повторен для новых 8-битных данных.
В частности, новые данные могут быть сдвинуты во внутренний сдвиговый регистр 595, не затрагивая светодиоды. Светодиоды будут обновляться новыми данными только с применением RCLK . передний край.
Что делать, если нам нужно управлять более чем восемью светодиодами? Просто каскадируйте еще один 74AHC594 SER закрепить на Q H ’ существующего переключателя.
Параллельно с SRCLK и RCLK булавки. Микропроцессор должен будет передать 16-битные данные с 16-тактовой частотой, прежде чем генерировать RCLK . питание обоих устройств.
Дискретные светодиодные индикаторы, которые мы показываем, могут быть 7-сегментными светодиодами. Однако существуют устройства LSI (крупномасштабная интеграция), способные обрабатывать несколько семисегментных цифр.
Это устройство принимает данные от микропроцессора в последовательном формате, управляя большим количеством светодиодных сегментов, чем имеет контактов, за счет мультиплексирования светодиодов.
СВЯЗАННЫЕ РАБОЧИЕ ТАБЛИЦЫ:
- Таблица регистров сдвига
Промышленные технологии
- Фазовый сдвиг
- Восьмеричное и шестнадцатеричное преобразование в десятичное
- Преобразование из десятичной нумерации
- Введение в регистры сдвига
- Преобразование типов С#
- Пандемия ускоряет переход к трехмерной печати
- С# — преобразование типов
- Химическое пленочное конверсионное покрытие для листового металла
- Преобразование звезды в дельту и дельты в звезду. Преобразование Y-Δ
- Что такое пассивирующее и конверсионное покрытие | CNCLATHING Услуги по отделке поверхностей