


Контур управления:открытый и закрытый
 Контур управления с обратной связью, вероятно, является наиболее инновационным и надежным инструментом в области техники управления. Петли управления в целом эффективны инструменты для определения проблем и проблем в системе, достижения заданных значений в процессах и поддержания стабильности системы. Существует три основных типа систем контура управления:замкнутый контур, разомкнутый контур и комбинированный разомкнутый и замкнутый контур. Замкнутый цикл в большей степени зависит от обратной связи, а разомкнутый — нет. Комбинированный использует как обратную связь, так и прямую связь для стабилизации процесса.
Контур управления с обратной связью, вероятно, является наиболее инновационным и надежным инструментом в области техники управления. Петли управления в целом эффективны инструменты для определения проблем и проблем в системе, достижения заданных значений в процессах и поддержания стабильности системы. Существует три основных типа систем контура управления:замкнутый контур, разомкнутый контур и комбинированный разомкнутый и замкнутый контур. Замкнутый цикл в большей степени зависит от обратной связи, а разомкнутый — нет. Комбинированный использует как обратную связь, так и прямую связь для стабилизации процесса.
Следующая диаграмма иллюстрирует весь цикл управления с обратной связью:
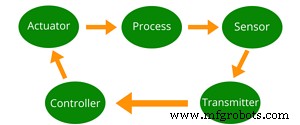
Разделив это, мы получим:
- Процесс, который необходимо контролировать
- Датчик, измеряющий физический параметр процесса
- Передатчик, преобразующий сенсорную информацию в электронные сигналы.
- Контроллер, сравнивающий сигнал и заданное значение
- Привод, выполняющий корректирующие действия в ответ на сигнал, отправленный контроллером
В замкнутой системе управления последовательность повторяется до тех пор, пока не будет достигнуто заданное значение. Некоторыми распространенными примерами являются термостат температуры печи или круиз-контроль в автомобиле. Но это не означает, что для правильной работы всех автоматических операций требуется обратная связь. Конфигурации без обратной связи, которые предполагают, что последовательность требуется только один раз, могут обслуживать несколько операций без необходимости постоянного подтверждения через обратную связь.
Типы управления с обратной связью
Непрерывное управление с обратной связью
Не все замкнутые процессы одинаковы. Для непрерывного процесса управления контур обратной связи поддерживает значение управляющей переменной, установленное пользователем, также называемое уставкой. Контроллер выполняет простое вычитание последнего сенсорного измерения из уставки. Величина результата определяет корректирующее усилие, которое будет приложено контроллером через исполнительный механизм.
Например, автомобиль с включенным круиз-контролем будет использовать спидометр в качестве датчика для измерения скорости. Если скорость ниже установленного значения, то контроллер разгоняет автомобиль, подавая больше топлива. Если автомобиль движется слишком быстро, подача топлива пропорционально уменьшается. Этот процесс измерения-решения-приведения в действие продолжается до тех пор, пока скорость автомобиля не достигнет заданного значения.
Дискретное управление с обратной связью
При непрерывном управлении с обратной связью интересующая переменная измеряется постоянно, но в дискретных системах управления инициирующее событие приводит к последовательности измерения-принятия-приведения в действие. Например, люди используют свои глаза, чтобы определить состояние окружающего освещения снаружи перед тем, как начать движение, и определить, следует ли включать фары. Никаких дополнительных корректировок не требуется до тех пор, пока не произойдет инициирующее событие, такое как плотный облачный покров или начало следующего рейса.
Дискретные контуры обратной связи намного проще, чем непрерывные, потому что они не связаны с непрерывным мониторингом или такими проблемами, как резкие выбросы. Мгновенные результаты получаются при включении фар по сравнению с постепенными результатами при использовании круиз-контроля.
Управление без обратной связи
Как упоминалось ранее, контроллеры с разомкнутым контуром предполагают, что уставка будет достигнута за один раз, и применяют одно усилие управления при срабатывании триггера. Этим контролерам также может быть предоставлена возможность измерять результаты. Например, двигатель запустился или остановился? Эти измерения в основном предназначены для соображений безопасности и не являются частью последовательности действий.
Иногда контроллер с обратной связью может работать как контроллер без обратной связи из-за отказа датчика или ручного переключения оператором. Оператор должен вмешиваться, когда контроллер с обратной связью не может поддерживать свою стабильность. Например, принудительный регулятор давления может быть не в состоянии должным образом компенсировать падение давления в линии, что приводит к частым выбросам и колебаниям. В этих случаях оператор должен вручную взять на себя управление, чтобы стабилизировать систему.
Есть также несколько процессов, для которых стабильные элементы управления слишком сложны в настройке, что требует очень частого участия опытных операторов. Операторы могут использовать свой опыт, чтобы манипулировать входными данными процесса и поддерживать требуемое заданное значение намного быстрее, чем контроллер. Но это не идеальная ситуация с использованием контуров управления. Так что же произойдет, если объединить и открытое, и замкнутое управление?
Сочетание открытых и закрытых элементов управления
Управление без обратной связи несет в себе недостаток неточности, так как удаление части обратной связи также лишает гарантии того, что усилие управления создает необходимое усилие управления. Управление с разомкнутым и замкнутым контуром могут быть объединены для формирования стратегии прямой связи, если скорость и точность требуются одновременно.
Упреждающий регулятор строится на математической модели процесса таким образом, чтобы все усилия по управлению были аналогичны действиям опытного инженера, работающего в ручном режиме. Он измеряет результаты начальных усилий разомкнутого контура и применяет дальнейшие корректировки для устранения ошибок и достижения заданного значения. Этот тип контроллера удобен, когда нужные датчики доступны для измерения множества критериев. Если ее будущий эффект можно предсказать, то контроллер может предпринять упреждающие шаги, чтобы гарантировать устранение ошибки в кратчайшие сроки.
Например, если автомобиль оснащен радаром, а также круиз-контролем, он может увидеть приближающийся холм и ускориться, чтобы компенсировать дополнительную силу, необходимую для подъема на холм. Без предварительного уведомления круиз-контроль никогда не узнает, что ему нужно ускориться, что приводит к тому, что замкнутый контур применяет корректирующие усилия до тех пор, пока снова не будет достигнуто заданное значение.
Каждый тип контура управления имеет свое применение. Управление без обратной связи лучше всего подходит для ситуаций, когда уставка достижима за один раз. Регуляторы с обратной связью лучше всего подходят для ситуаций, требующих проб и ошибок для достижения заданного значения. А комбинированное управление с разомкнутым и замкнутым контуром требует математических моделей, а иногда и датчиков для правильного функционирования. Набор опций позволяет операторам правильно выбрать правильный контур управления для своих нужд.
Система управления автоматикой
- Циклы с фазовой синхронизацией
- Цепи управления
- Знак Neon A Shop Open / Closed Makerspace на Raspberry Pi 2 (Эль-Пасо, Техас)
- Робот для открытия резюме
- Лучшие способы устранения неполадок в контурах автоматизации и управления процессами
- Преимущества конвергенции промышленного управления
- Рост рынка управления низким напряжением
- Переживание проекта миграции системы управления
- Общие сведения о промышленных панелях управления
- Основы дизайна панели управления