


Гибкий датчик магнитного поля на основе AgNW и MNs-PDMS
Аннотация
В данной статье представлен новый гибкий датчик магнитного поля на основе нанопроволок Ag и магнитных наночастиц, легированных полидиметилсилоксаном (AgNWs &MNs-PDMS), с сэндвич-структурой. В этой работе MN действуют как чувствительный элемент для измерения магнитного поля. Кроме того, токопроводящие сети образуются из AgNW во время деформации. Магнитострикция приводит к изменению сопротивления датчиков AgNWs и MNs-PDMS. Кроме того, MN увеличивают токопроводящие пути для электронов, что приводит к более низкому начальному сопротивлению и более высокой чувствительности результирующего датчика во время деформации. Следует подчеркнуть, что взаимодействие AgNW и MN играет незаменимую роль в измерении магнитного поля, поэтому было исследовано изменение сопротивления при растяжении и сжатии. Гибкий датчик магнитного поля, основанный на соотношении масс MN и AgNW 1:5, показал наивысшую чувствительность 24,14 Ом / Тл в эксперименте по измерению магнитного поля. Наконец, была создана модель магнитострикционного и пьезорезистивного зондирования для изучения механизма датчика.
Фон
Гибкие электронные устройства в последнее время привлекают огромное внимание из-за их легкого взаимодействия с возможностями долгосрочного мониторинга [1,2,3,4,5]. Они стали одними из самых перспективных электрических датчиков благодаря таким преимуществам, как легкий вес, портативность, отличные электрические свойства и высокая степень интеграции [6,7,8,9,10,11]. Несомненно, наноматериалы играют незаменимую роль в гибких сенсорах благодаря своим выдающимся свойствам, например небольшим размерам, поверхностному эффекту и эффекту квантового туннелирования [12,13,14]. Основываясь на резонансном туннельном эффекте наноматериалов, многие исследования сосредоточены на пьезорезистивных датчиках деформации, сопротивление которых изменяется при деформации [15,16,17]. Одним из ключевых применений мягких тензодатчиков является гибкая электронная оболочка, поэтому модификация датчиков является тенденцией развития. В некоторых отчетах заявлено о добавлении модулей измерения температуры [18, 19] и влажности [20, 21] в матрицы датчиков деформации.
Помимо возможностей измерения напряжения, температуры и влажности, электронные матрицы датчиков кожи остро нуждаются в некоторых новых функциях. Другими словами, чем больше функций, тем умнее электронный скин. Среди новых функций новое приложение - определение магнитного поля. Следует отметить, что только датчик магнитно-мягкого поля может использоваться в качестве модуля для электронной кожи в будущем. Благодаря своей гибкости и эластичности датчики магнитно-мягкого поля могут использоваться в более сложных областях, некоторые исследователи работают в этой области [22,23,24,25,26]. Chlaihawi et al. подготовил гибкий тонкопленочный сенсор ME для H ac сенсорные приложения [27]. Jogschies et al. исследовали тонкие слои полиимида NiFe 81/19 для измерения магнитного поля [28]. Tekgül et al. применили магнитные мультислои CoFe / Cu на датчиках GMR [29]. Melzer et al. сообщили о гибких датчиках магнитного поля, основанных на эффекте Холла [30]. Также был исследован ряд гибких оптических датчиков магнитного поля [31,32,33,34]. По сравнению с традиционными детекторами магнитного поля, гибкие сенсоры магнитного поля более удобны в применении, они меньше по размеру и больше подходят для обнаружения в сложных условиях. Тем не менее, насколько нам известно, об исследованиях сенсора мягкого магнитного поля, обращенного к многофункциональной электронной коже, редко сообщалось.
Благодаря отличным электронным и магнитным свойствам Ag ННК [35,36,37] и MN (Ni-Fe) [38, 39] соответственно, в этой статье предлагается разработка и измерение гибких датчиков магнитного поля AgNW и MNs-PDMS. с многослойной структурой на основе магнитострикционного и пьезорезистивного эффектов. МН были введены в качестве чувствительных к магнитному полю единиц в пьезорезистивном датчике деформации на основе AgNW. Различная магнитострикционная деформация датчика на основе AgNW и MNs-PDMS вызывает различные вариации сопротивления. После определения характеристик наноматериалов для изготовления гибких датчиков магнитного поля были использованы три различных соотношения масс MN и AgNW (AgNW и MN; 1:1, 1:2, 1:5). Перед тем, как были исследованы свойства датчиков чувствовать магнитное поле, была изучена взаимосвязь между изменениями сопротивления и растяжением или втягиванием, чтобы сделать вывод о взаимодействии MN и AgNW. По результатам характеризации датчик магнитного поля, полученный в данной работе, может быть применен в многофункциональной электронике в будущем.
Методы
Подготовка гибких датчиков
МН были синтезированы методом латексного компаундирования [24, 25]. Диаметр и длина AgNW (которые были приобретены у Changsha Weixi New Material Technology Corporation, Китай, в длину) составляют 50 нм и 20 мкм соответственно. Различные соотношения MN и AgNW были выбраны для исследования необходимого количества наноматериалов. Таким образом, МН и AgNW в массовом соотношении 0:1, 1:5, 1:2 и 1:1 были диспергированы ультразвуком в абсолютном этаноле. На рисунке 1 показана схема процесса изготовления датчика. Эластомер ПДМС и сшивающий агент в массовом соотношении 10:1 наносили каплями на подложку с приклеенной прямоугольной лентой. После нагревания при 70 ° C в течение 2 ч ПДМС с канавкой отклеился и нарезал нужную форму, размер канавки 30 мм × 5 мм. Четыре образца AgNW и MN в различных соотношениях были заполнены в выемках пленок PDMS соответственно. С обеих сторон были установлены два мягких медных электрода, а затем ПДМС был опущен сверху, чтобы зафиксировать электроды и наноматериалы. После нагревания при 70 ° C в течение 2 часов датчики были получены.
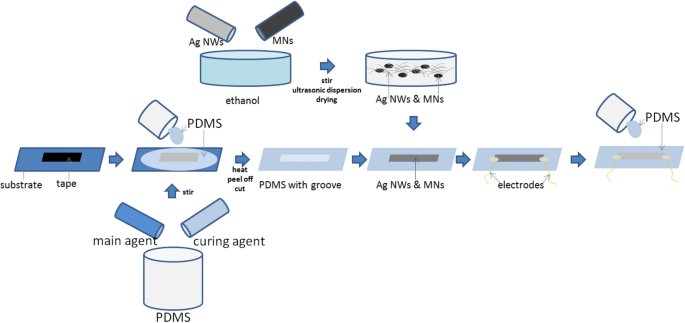
Схема структурного проектирования и технологическая схема изготовления датчика
Характеристика
AgNW и MN с различными соотношениями смешивания были охарактеризованы с помощью сканирующего электронного микроскопа (SEM, S4700 SEM Hitachi Corporation, Токио, Япония). Компоненты AgNW и MN в различных соотношениях масс были охарактеризованы с помощью XRD-измерений (Buker D8 Advance) с использованием CuK-излучения с длиной волны 1,5406 Å.
Вольт-амперные характеристики измеряли с помощью измерителя источника Keithley 2400 при комнатной температуре (комнатная температура составляла 25 ° C). Эксперименты по растяжению проводили на платформе для растяжения (Zolix TSM25-1A и Zolix TSMV60-1 s, Zolix Corporation, Пекин, Китай), а сопротивление датчиков измеряли с помощью Keithley 2400 Source Meterat. Были проведены эксперименты по обнаружению магнитного поля, когда гибкий датчик был зафиксирован в другом магнитном поле. Напряженность магнитного поля начинается с 0 Тл и увеличивается на 0,1 Тл.
Результаты и обсуждение
Спектр XRD MN показан на рис. 2. Характерные пики предполагают, что MN состоят из FeCo, FeNi и Co (OH) 2 . Результат демонстрирует, что все эти композиции являются магнитными материалами.
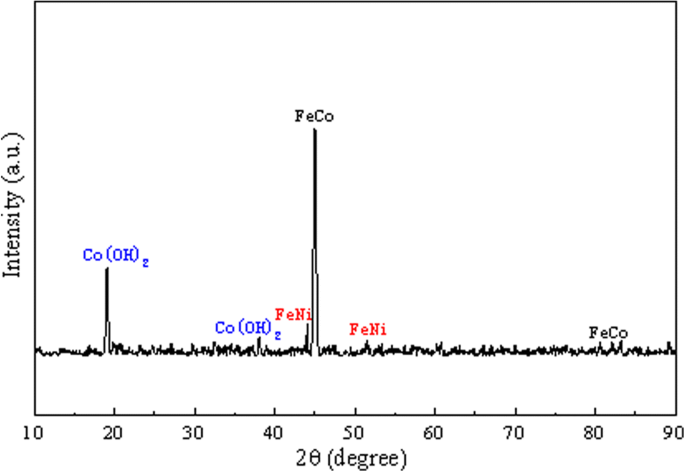
Спектр XRD МН
СЭМ-изображения AgNW и MN показаны на рис. 3. ННК из чистого Ag с длиной 20 мкм и диаметром 50 нм образуют линейную сеть, которую можно наблюдать на рис. 3a. Морфология AgNW и MN в массовом соотношении 5:1, 2:1 и 1:1 показана на рис. 3b – d. Небольшие количества МН среди Ag ННК можно наблюдать на рис. 3б. Очевидно, что сети на рис. 3в более разреженные, чем на рис. 3а, б. Более того, изгиб AgNW и других MN можно увидеть на рис. 3d. Проводящие сети, которые построены AgNW, и количество MN увеличивается, очевидно, на рис. 3a – d. Равномерное перемешивание ННК и МН Ag, которые показаны на рис. 3a – d, играют связующую роль в повышении чувствительности датчиков при растяжении или сжатии. Роли, которые играли AgNW и MN, можно объяснить результатами на рис. 3.
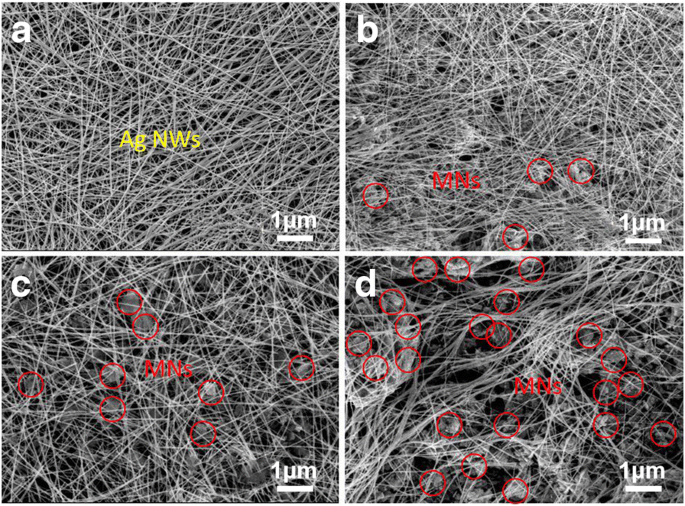
а AgNW и MN в массовом соотношении 1:0, b 5:1, c 2:1 и d 1:1
ВАХ датчиков на основе AgNW и MN в соотношении масс 1:0, 5:1, 2:1 и 1:1 показаны на рис. 4. Все четыре кривые представляют собой плавные прямые линии, которые представляют собой четыре датчика показывают значительные омические характеристики. Он заявляет, что эти датчики являются токопроводящими и стабильными без деформации.
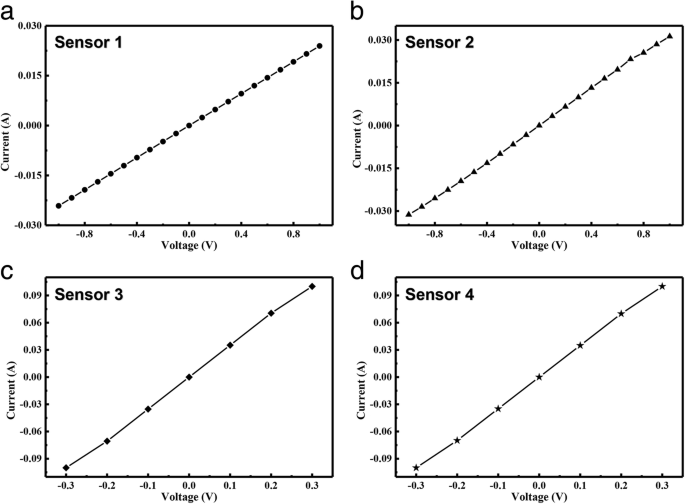
ВАХ датчиков на основе AgNW и MN при массовом соотношении a 1:0, b 5:1, c 2:1 и d 1:1
Из рис. 4а можно рассчитать, что сопротивление датчика составляет 41,58 Ом, когда чувствительным элементом являются чистые AgNW. Сопротивления датчиков на основе AgNW и MN в соотношении масс 1:0, 5:1, 2:1 и 1:1 составляют 30,2 Ом, 5,04 Ом и 2,87 Ом, как показано на рис. 4b – d. Он показывает тенденцию к снижению сопротивления при введении MN в чувствительные клетки. Сравнивая сопротивления четырех датчиков, можно сделать вывод, что сопротивления гибких датчиков магнитного поля уменьшаются с увеличением доли MN, а минимальное сопротивление возникает у датчика с AgNW и MN в массовом соотношении 1:1. Это также может доказать, что смешивание AgNW и MN в определенной пропорции помогает снизить сопротивление, потому что проводящие компоненты MN вели более проводящие пути в сетях.
Взаимосвязь между изменениями сопротивления и растяжением или сокращением были изучены, чтобы сделать вывод о взаимодействии между MN и AgNW во время деформации. Относительные изменения сопротивления датчиков на основе AgNW и MN с удлинением при комнатной температуре показаны на рис. 5a – d. Изменение сопротивления в процессе растяжения представлено черными кривыми, а изменение сопротивления в процессе высвобождения показано красными кривыми. Δ R и R 0 представляют собой изменение относительного сопротивления при деформации и начальное сопротивление датчика, а L 0 и Δ L представляют собой начальную длину и относительное удлинение осевого образца датчика. Калибровочный коэффициент датчиков может быть рассчитан с помощью уравнения калибровочного коэффициента (GF) =Δ R / R 0 :Δ L / L 0 . Рисунок 5a показывает, что датчик на основе AgNW является проводящим в процессе растяжения и восстановления, когда длина растяжения находится в пределах 7,12% от исходной длины, а его GF составляет 129,6. Сопротивление увеличивается при растяжении. Это может быть связано с увеличением расстояния между AgNW в датчике во время деформации, туннельными каналами и уменьшением проводящего пути. Обратный процесс вызвал уменьшение сопротивления при втягивании. Когда MN были введены в чувствительный блок, характеристики чувствительности гибкого устройства также изменяются. Сопротивление датчика на основе AgNW и MN в массовом соотношении 5:1 изменяется почти линейно, когда диапазон растяжения находится в пределах 4,4% от исходной длины на рис. 5b. Когда длина растяжения составляет более 3,9% от исходной длины, происходит более сильное увеличение сопротивления. GF датчика увеличивается до 257, что означает, что чувствительность датчика увеличена по сравнению с датчиком на основе чистых AgNW. Однако диапазон деформации не улучшается за счет участия МН в соотношении масс 5:1, что можно наблюдать на рис. 5а, б. Рисунок 5c демонстрирует, что сопротивление датчика на основе AgNW и MN при массовом соотношении 2:1 изменяется линейно, когда диапазон растяжения находится в пределах 8,7% от исходной длины, а GF датчика составляет 264,4, что выше, чем у датчика. датчики на основе AgNW и MN в массовом соотношении 1:0 и 5:1. На рис. 5d сопротивление датчика на основе AgNW и MN в массовом соотношении 1:1 изменяется линейно, когда диапазон растяжения находится в пределах 9% от исходной длины. Когда длина растяжения составляет более 9% от исходной длины, сопротивление существенно изменяется, и GF составляет 222,2. Таким образом, гибкий датчик магнитного поля, основанный на AgNW и MN в соотношении масс 2:1, показывает наибольшее значение GF, равное 264,4, и имеет относительно большой диапазон растяжения. Более того, этот датчик реагирует более чувствительно на возрастание напряжения, изменение сопротивления также имеет лучшую линейную зависимость. Основным ингредиентом MN является FeCo, который представляет собой проводящий сплав. Сравнивая эти четыре типа датчиков, можно увидеть, что чем больше MN участвует, тем больше проводящих путей в чувствительных элементах во время растяжения. Однако более высокое соотношение MN в Ag ННК и MN одинакового качества означает меньшее количество присутствующих Ag ННК, что вредно для стабильности проводящей сети во время деформации. Отсюда и падение относительного сопротивления при смещении 9%. Следовательно, AgNW и MN в соотношении масс 1:1 - это максимальное количество MN, которое мы разработали в этой работе, а датчик, основанный на AgNW и MN в соотношении масс менее 1:1, является непроводящим при растяжении. Результаты на рис. 5 демонстрируют, что синергетические эффекты AgNW и MN в определенных соотношениях увеличивают чувствительность и диапазон деформации.
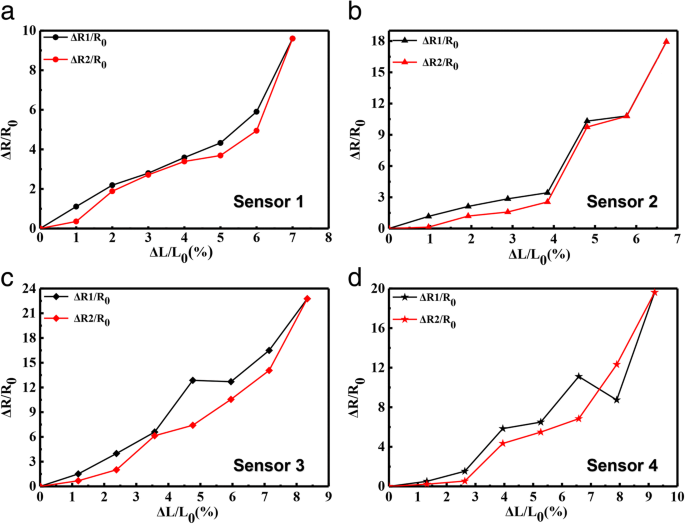
Относительные изменения сопротивления датчиков на основе AgNW и MN при массовом соотношении a 1:0, b 5:1, c 2:1 и d 1:1 с деформацией
МН могут приближаться под действием магнитного поля, поэтому магнитострикция может привести к усадке датчиков. Чтобы охарактеризовать взаимодействие AgNW и MN в датчиках во время сжатия, мы измерили изменение сопротивления во время сжатия, и экспериментальные результаты показаны на рис. 6. Рисунок 6a показывает, что датчик на основе AgNW является проводящим в процессе сжатия. усадка и восстановление, когда длина сокращения находится в пределах 1,6% от исходной длины, а ее максимальное значение GF составляет 13,75; AgNW, встроенные в PDMS, контактируют друг с другом в процессе усадки, что приводит к увеличению проводящих путей. Следовательно, сопротивление уменьшается по мере увеличения сократительной силы. Уменьшение расстояния между AgNW в датчике, все больше и больше нанопроволок перекрываются, что приводит к снижению сопротивления датчика. Когда мы вводили MN в AgNW, рис. 6b показывает, что характеристики усадки гибкого устройства на основе AgNW и MN при массовом соотношении 5:1. Сопротивление датчика изменяется с диапазоном усадки 2,5% от исходной длины, а максимальное значение GF составляет 24. По сути, такое же изменение сопротивления также применяется к датчикам на основе AgNW и MN с массовым соотношением 2:1 и 1:1, что показано на рис. 6в, г. При увеличении отношения масс MN в чувствительном блоке сопротивление датчика на основе AgNW и MN в соотношении масс 2:1 изменяется, когда диапазон усадки находится в пределах 1,6% от исходной длины, а его GF составляет 21,875. В то же время сопротивление датчиков на основе AgNW и MN в массовом соотношении 1:1 также уменьшалось, когда диапазон усадки находится в пределах 2,8% от исходной длины, а его GF составляет 20,35. Можно сделать вывод, что изменение сопротивления датчика на основе AgNW и MN в соотношении масс 5:1 с усадкой больше, чем у трех других датчиков, а чувствительность самая большая. В отличие от процесса растяжения, сопротивление всех датчиков уменьшается с увеличением длины сжатия. Когда массовое соотношение AgNW и MN составляет 5:1, датчик имеет самый высокий коэффициент чувствительности во время процесса сжатия, самый высокий GF которого равен 24. Сравнивая рис. 6a – d, меньшее количество MN соединяет проводящие пути легче, потому что их больше пространство для материалов, движущихся при усадке, что противоречит результатам на рис. 5. Соответственно, GF датчика на основе AgNW и MN при массовом соотношении 5:1 является самым высоким при усадке. Результаты на рис. 6 демонстрируют, что синергетический эффект возникает, когда соотношение AgNW и MN больше.
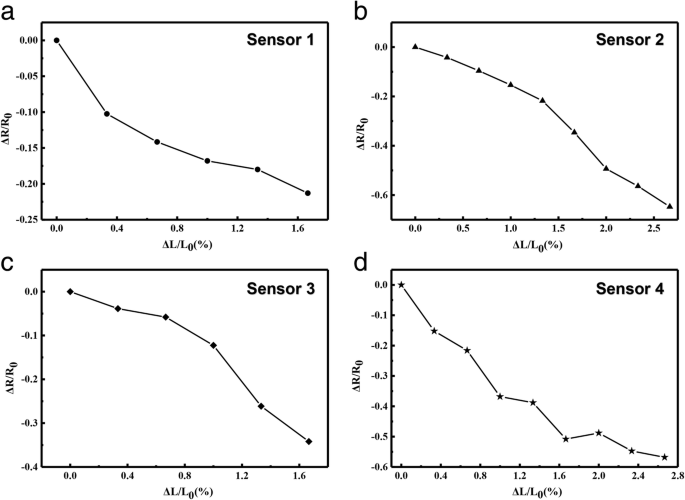
Относительные изменения сопротивления датчиков на основе AgNW и MN при массовом соотношении a 1:0, b 5:1, c 2:1 и d 1:1 с усадкой
В разных магнитных полях различные изменения сопротивления гибкого магнитного датчика показаны на рис. 7. Сопротивление датчика на основе AgNW составляет 41,58 Ом. Как показано на рис. 7a, мы помещаем датчик на основе чистых AgNW в постепенно увеличивающееся магнитное поле, и сопротивление датчика изменяется при соответствующей вибрации. Из-за магнитострикционного эффекта металлических материалов сопротивление датчика немного изменяется. Максимальная скорость изменения сопротивления составляет 0,037 при напряженности магнитного поля 0,4 Тл. Сопротивление датчика на основе AgNW и MN в соотношении масс 5:1 также уменьшается с увеличением напряженности магнитного поля, как показано на рис. 7b. По сравнению с датчиком без MN, изменение сопротивления датчика на основе AgNW и MN в соотношении масс 5:1 при изменении магнитного поля более очевидно. Когда напряженность магнитного поля составляет 0,4 Тл, максимальная скорость изменения сопротивления составляет 0,28. На рис. 7c, d то же самое приложение к датчикам на основе AgNW и MN в соотношении масс 2:1 и 1:1, и изменения сопротивления составляют 0,14 и 0,19 при увеличении магнитного поля соответственно. Чувствительность датчика на основе AgNW и MN в соотношении масс 5:1 является наивысшей, а непрерывное изменение сопротивления с магнитным полем показано на рис. 8. Сравнение параметров тензодатчиков на основе различных соотношений MN и AgNW представлена в таблице 1.
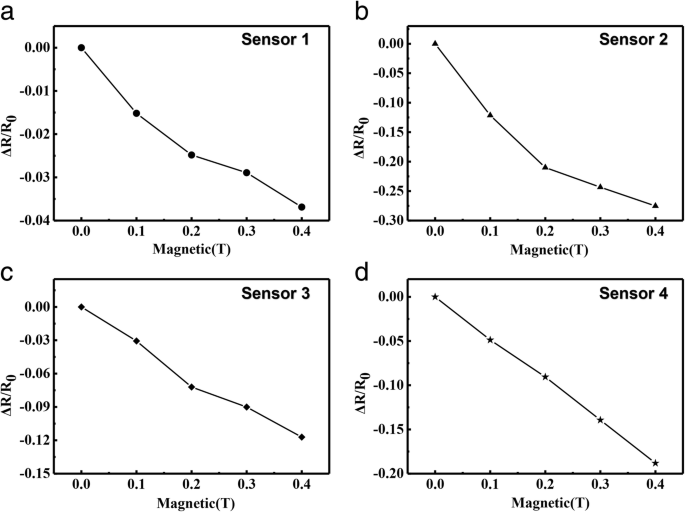
Изменение сопротивления в разных магнитных полях
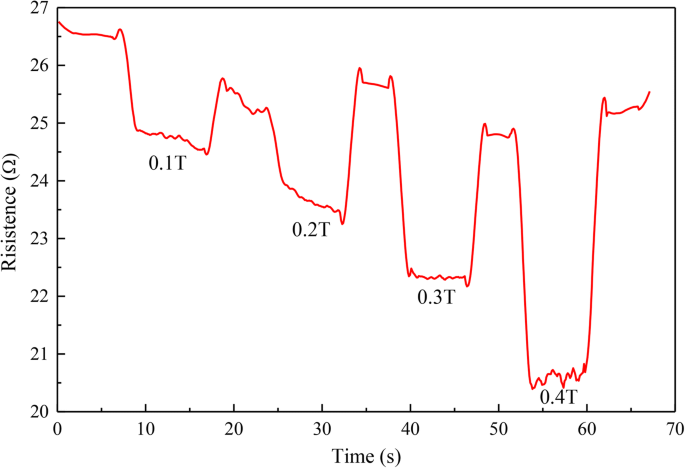
Связь между сопротивлением и различными магнитными полями
Можно рассчитать, что чувствительность датчика магнитного поля составляет 24,14 Ом / Тл. В заключение, когда соотношение масс MN и AgNW составляет 1:5, реакция датчика на изменение магнитного поля наиболее чувствительна с чувствительностью 24,14 Ом / Тл. Полученный в данной работе гибкий датчик магнитного поля может быть в дальнейшем применен для определения напряженности магнитного поля. Результаты тестирования этого приложения соответствуют процессу усадки датчика при сравнении результатов на рис. 7 и 8. Это означает, что наноматериалы в датчиках перемещаются вместе, когда они находятся в магнитном поле. Анализ механизма подробно заявляет следующее.
Чтобы понять изменения сопротивления датчиков при различной напряженности магнитного поля, мы предлагаем простую модель для описания принципа работы датчика, как показано на рис. 9. Многочисленные AgNW и MN в PDMS образуют проводящую сеть. Проводящие пути, образованные AgNW и MN без магнитного поля, показаны красными линиями на рис. 9a. МН имеют тенденцию к равномерному расположению в магнитном поле, что показано на рис. 9b. Однако существует крошечное пространство для изменения положения MN, поэтому только направления MN меняются вместе с силовыми линиями магнитного поля. Более высокая напряженность магнитного поля означает большую силу МНС, которая может преодолеть сетевые ограничения AgNW. Направление движения МН заставляет ННК Ag собираться вместе, что является причиной увеличения числа проводящих путей. Чем больше проводящие пути, тем больше переносится электронов, что приводит к более низкому сопротивлению, сопротивление уменьшается с увеличением напряженности магнитного поля, таким образом.
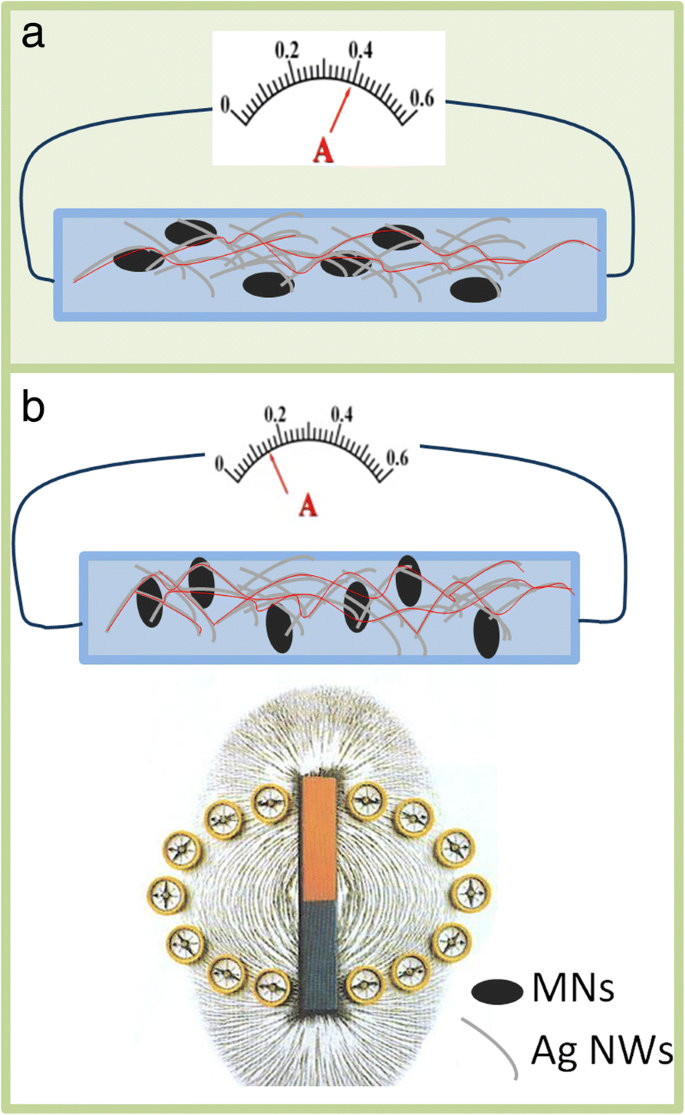
Схематическая модель датчика магнитного поля на основе AgNW и MNs-PDMS
Выводы
Устройство, разработанное в этой статье, соответствует тенденции развития гибкой электроники. В данной работе исследовался гибкий датчик магнитного поля на основе AgNW и MNs-PDMS с многослойной структурой. На основе характеристик SEM и XRD были определены компоненты и морфология различных соотношений наноматериалов. Затем были измерены вольт-амперные характеристики и изменения сопротивления датчиков на основе AgNW и MN в соотношении масс 1:0, 5:1, 2:1 и 1:1 с растяжением и усадкой соответственно. Взаимодействие между AgNW и MN во время деформации было установлено на основе результатов характеризации. Затем датчики, основанные на различном соотношении масс MN и AgNW, были исследованы на предмет чувствительности к магнитному полю. Когда массовое соотношение AgNW и MN составляет 5:1, датчик в исходном состоянии показывает наивысшую чувствительность 24,14 Ом / Тл. Результаты экспериментов показывают, что сенсор сжимается с увеличением напряженности магнитного поля. Кроме того, были созданы модели магнитострикционного и пьезорезистивного зондирования для изучения механизма этого сенсора.
Сокращения
- AgNWs:
-
Ag Nanowires
- GF:
-
Измерительный коэффициент
- MNs:
-
Магнитные наночастицы
- PDMS:
-
Полидиметилсилоксан
- SEM:
-
Сканирующий электронный микроскоп
- XRD:
-
Рентгеновская дифракция
Наноматериалы
- Электромагнетизм
- Магнитные единицы измерения
- Магнитные поля и индуктивность
- Датчик компаса - работа и приложения
- Работа магнитного датчика и его применение
- Основы цифровых магнитных датчиков
- Проект Интернета вещей на основе Raspberry PI Подключение датчика DHT11
- Новый гибкий и высоконадежный датчик
- Обнаружение магнитных полей
- Что такое магнитное экранирование?