


Магнитный дизайн на эффекте Холла:конфигурации лобового и скользящего направления
Узнайте, как эффект Холла используется в приложениях определения положения.
Определение положения - одно из наиболее важных применений датчиков Холла. Устройство на эффекте Холла определяет силу приложенного магнитного поля. Чтобы определить положение объекта, мы можем прикрепить к нему небольшой постоянный магнит. Когда объект перемещает магнит по отношению к устройству Холла, сила магнитного поля изменяется. Эти изменения могут быть обработаны системой для определения положения объекта.
Существует несколько различных конфигураций сенсора и магнита, которые можно использовать в приложениях определения положения на основе эффекта Холла. В каждой конфигурации сенсор-магнит магнит перемещается по отношению к сенсору по-разному. Это влияет на магнитное поле, воспринимаемое устройством Холла, и изменяет характеристики системы.
В этой статье мы рассмотрим некоторые из основных магнитных конфигураций, которые используются в определении положения на основе эффекта Холла, и обсудим их преимущества и недостатки.
Прямая конфигурация
Самая простая магнитная конфигурация - это лобовое зондирование, показанное на Рисунке 1.
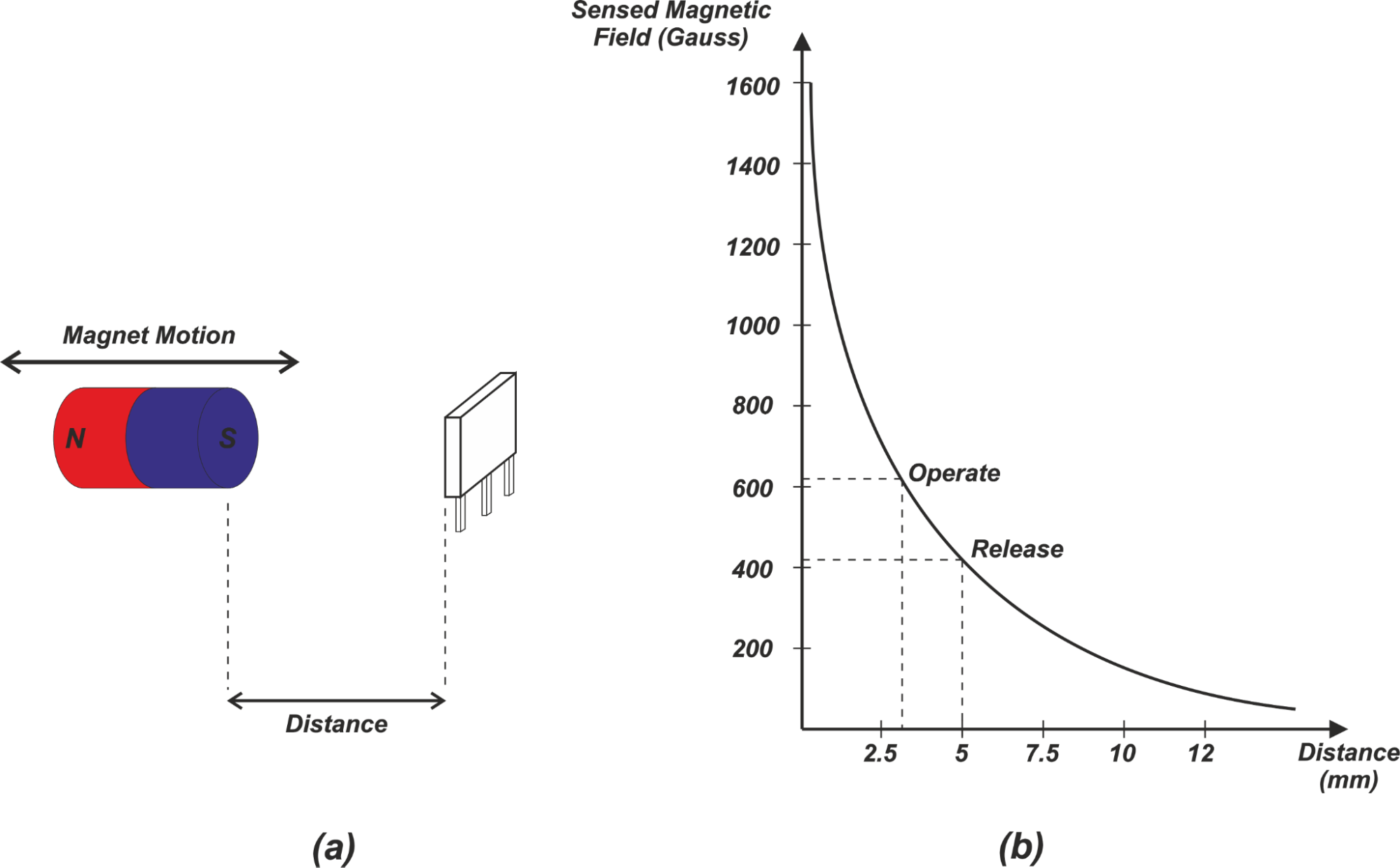
Рисунок 1.
В этом случае южный полюс магнита перемещается прямо к датчику или от него. Когда магнит находится очень близко к датчику, большее количество магнитных линий потока проходит через чувствительную поверхность датчика. Однако по мере того как южный полюс магнита удаляется от датчика, напряженность магнитного поля быстро уменьшается, как показано на Рисунке 1 (b).
Обратите внимание, что кривую зависимости Гаусса от расстояния иногда называют картой потока структуры. Плотность магнитного потока лобовой конфигурации обратно пропорциональна квадрату расстояния между магнитом и датчиком. Значения магнитного потока, приведенные на рисунке 1 (b), могут быть получены с помощью магнита длиной примерно 30 мм и диаметром примерно 6 мм.
Приложение:обнаружение наличия объекта
Конфигурация лобового обзора может использоваться с цифровым (ВКЛ / ВЫКЛ) датчиком Холла для обнаружения присутствия объекта. Предположим, что магнитные точки срабатывания и срабатывания датчика такие, как показано на рисунке 1 (b). Точка срабатывания магнитного поля указывает уровень усиления магнитного поля, при котором включается устройство Холла. Точка магнитного срабатывания соответствует ослаблению магнитного поля, при котором устройство Холла выключается.
По мере приближения магнита к датчику напряженность магнитного поля становится все больше. На расстоянии около 3,1 мм измеренное магнитное поле равно точке срабатывания магнитного поля (около 620 Гаусс в нашем примере), которая включает датчик. Приближение магнита к датчику приводит к еще большему магнитному полю и сохраняет датчик включенным. Когда датчик удаляется от магнита, магнитное поле уменьшается.
Однако, пока магнитное поле не меньше точки срабатывания (около 420 Гаусс в нашем примере), датчик остается включенным. Только когда магнитное поле упадет ниже точки срабатывания, устройство выключится. Таким образом, мы можем обнаружить присутствие объекта.
Ограничения лобового зондирования
Эта конфигурация менее точна, особенно с точки зрения расстояния, на котором датчик отключается. Это связано с тем, что наклон карты потока (кривая зависимости Гаусса от расстояния) меньше вокруг точки выброса. Данное изменение значения точки магнитного срабатывания может привести к относительно большому изменению значения расстояния, на котором датчик отключается. Такое же изменение магнитной точки срабатывания приводит к меньшему изменению расстояния. Это показано на рисунке 2.
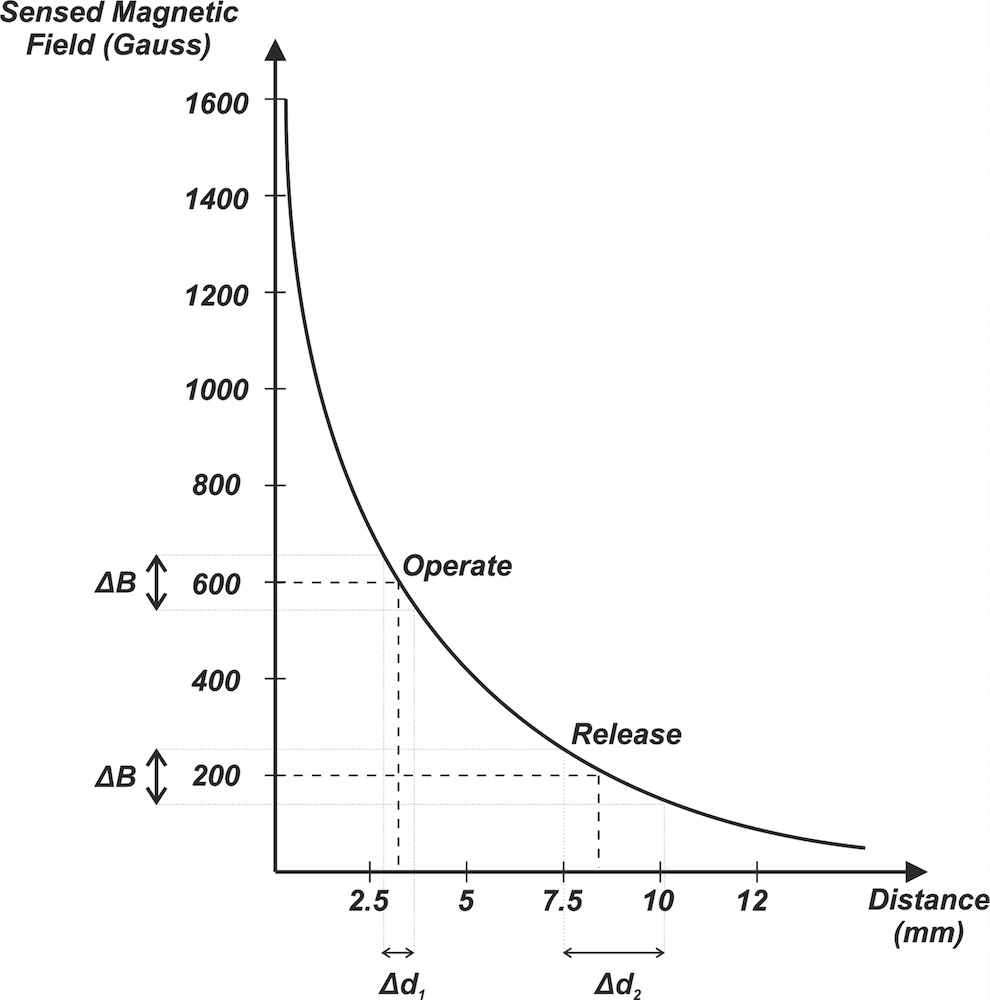
Рисунок 2
Предположим, что изменение точек срабатывания и срабатывания от устройства к устройству составляет ΔB для гипотетического датчика, как показано на рисунке 2. Поскольку кривая имеет больший наклон в точке срабатывания магнитного поля, Δd 1 намного меньше Δd 2 . Следовательно, расстояние, соответствующее точке срабатывания магнитного поля, будет более постоянным между разными платами.
Другой недостаток заключается в том, что зондирование в лоб нельзя использовать для обнаружения больших диапазонов смещения, поскольку силовые линии магнитного поля очень быстро затухают. Кроме того, при прямой конфигурации связь между воспринимаемым полем и расстоянием нелинейна. Это затрудняет обнаружение перемещения с длинным ходом, когда требуется измерение линейного положения. Из-за этих ограничений лобовое зондирование обычно используется в качестве датчика приближения в приложениях, где требования к точности не очень высоки.
Униполярное скользящее зондирование
В этой конструкции единственный полюс магнита перемещается вбок мимо чувствительной поверхности датчика. Это показано на Рисунке 3 (а).
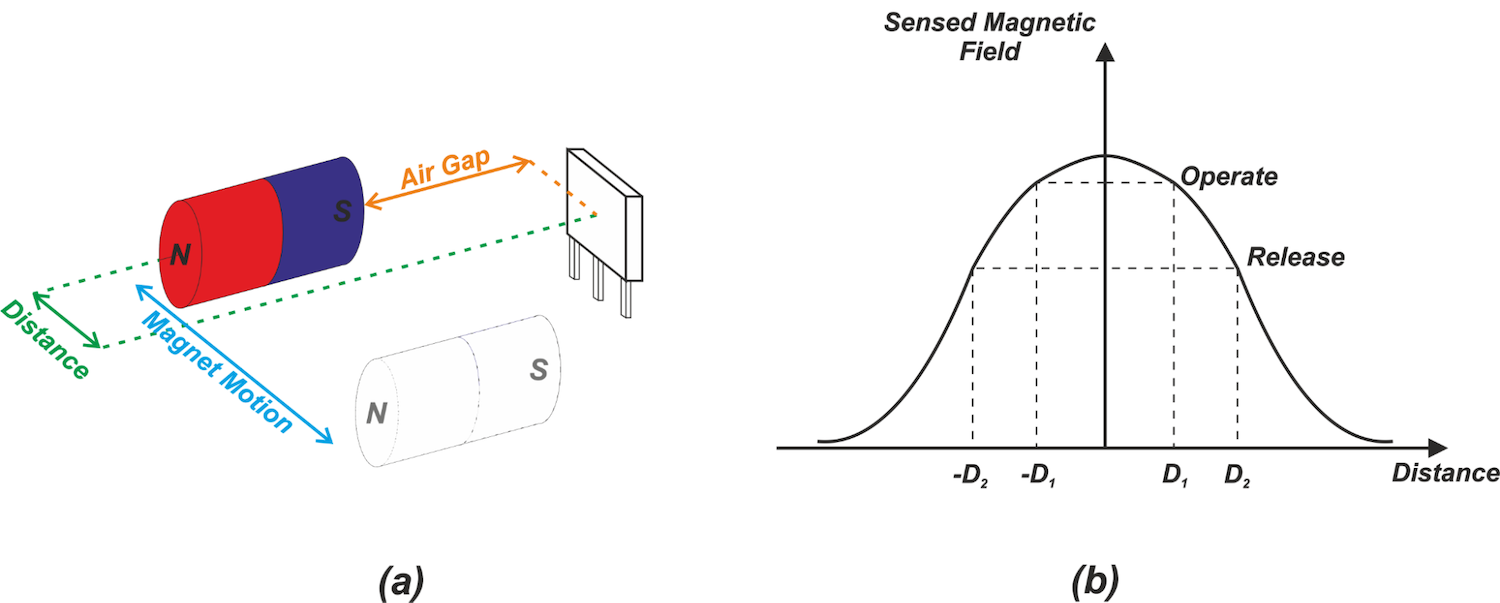
Рисунок 3
Полюс магнита находится на постоянном перпендикулярном расстоянии (показано «воздушным зазором» на рисунке), когда он проходит мимо датчика. В центральном положении (расстояние =0) измеренное магнитное поле максимально. По мере удаления магнита от датчика магнитное поле уменьшается. Поскольку магнитное поле, создаваемое магнитом, является симметричным, карта магнитного потока симметрична относительно начала координат, как показано на рисунке 3 (b).
Пиковое значение карты потока изменяется со значением «воздушного зазора», как показано на Рисунке 4.
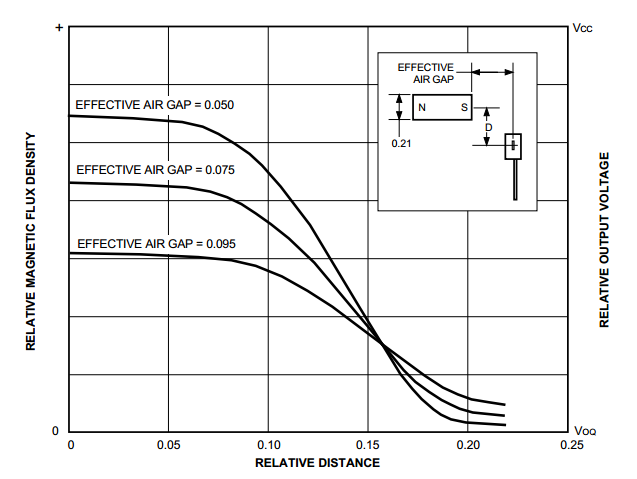
Рисунок 4. Изображение предоставлено Allegro.
Конфигурация "в лоб" или "по экрану"?
Важно отметить, что выбор магнитной конфигурации зависит от типа обнаруживаемого движения. Каждая система может иметь свой набор механических ограничений и функций. Например, при лобовой конфигурации объект не может пройти мимо датчика. Такое расположение подходит для приложений, в которых обнаруживаемый объект имеет определенную конечную позицию, и мы заинтересованы в обнаружении наличия / отсутствия объекта в этой конечной точке.
Например, лобовое зондирование может быть хорошим выбором для определения того, открыта или закрыта крышка крышки смартфона. У скользящего зондирования этого ограничения нет; его можно использовать независимо от того, проходит ли объект мимо датчика или нет.
Одна интересная особенность конструкции Slide-by - ее симметрия. Поскольку кривая зависимости Гаусса от расстояния для этой структуры симметрична относительно начала координат, точки срабатывания и срабатывания не зависят от того, движемся ли мы к датчику или от него. Это может быть полезно при обнаружении отклонения от центральной линии.
Обратите внимание на то, что существуют и другие скользящие конфигурации, некоторые из которых не обеспечивают симметричный отклик. В следующей статье мы рассмотрим более сложные магнитные конфигурации, которые обычно используются в приложениях для определения положения на основе эффекта Холла.
Чтобы увидеть полный список моих статей, посетите эту страницу.
Датчик
- Датчик артериального давления - работа и его приложения
- Работа датчика напряжения и его применение
- Датчик RVG - принцип работы и его приложения
- Лямбда-датчик - работа и его применение
- Работа датчика изображения и его приложения
- Датчик цвета - работа и приложения
- Датчик Arduino - типы и приложения
- Датчик компаса - работа и приложения
- Работа датчика тока ACS712 и приложения
- Понимание датчика Холла