


Эталонный дизайн упрощает управление двигателем промышленного робота
Новый эталонный дизайн ускоряет разработку инструментов на конце руки для промышленная робототехника с использованием одноосного сервоконтроллера / модуля драйвера со встроенным управлением движением.
Trinamic, теперь входящая в состав Maxim Integrated, продемонстрировала ряд передовых решений для управления мощностью в APEC, в том числе свои новейшие решения, которые упрощают разработку инструментария на конце руки (EoAT) для промышленной робототехники и одноосного сервоконтроллера. драйвер со встроенным контролем движения. В интервью Power Electronics Джефф ДеАнджелис, вице-президент по промышленным коммуникациям в Maxim Integrated, а также Йонас Прогер, директор по управлению бизнесом, и Стефан Кубиш, директор по определению продуктов в Trinamic, рассказали об этих последних решениях, которые ускоряют время разработки. различные приложения для промышленной автоматизации.
Эталонный дизайн с открытым исходным кодом TMCM-1617-GRIP-REF объединяет аппаратный полевой контроллер (FOC) и три коммуникационных порта. Он включает в себя микросхему промышленного класса MAX22000 от Maxim Integrated, трансивер MAX22515 IO-Link, высокоточный аналоговый ввод / вывод с программной конфигурацией и MAX14906, четырехканальный цифровой ввод / вывод, используемый для настройки рабочего режима одноканального входа / выхода. сервопривод оси.
Новый модуль сервоконтроллера / драйвера TMCM-1321 предназначен для оптимизации производительности двухфазных биполярных шаговых двигателей за счет оптимизации скорости оси и синхронизации, а также снижения потерь мощности. Maxim Integrated отметил, что устройство объединяет магнитный кодировщик и цифровые входы для оптических кодировщиков, чтобы упростить сервоуправление с помощью расширенной обратной связи и диагностики.
Платформа с открытым исходным кодом
«Преимущество эталонного дизайна TMCM-1617-GRIP-REF заключается в его способности интегрировать несколько схем на одной плате, которая обычно распределяется по нескольким платам или компонентам на конце манипулятора. Этот компактный размер сочетает в себе упрощенный интерфейс шины связи, который снижает нагрузку на жгут проводов и обеспечивает упрощенный способ передачи данных и питания по одной или двум парам проводов, а также возможность правильно ввести инструмент в эксплуатацию. Этот компактный размер и упрощенный интерфейс шины для обмена данными и конфигурирования в сочетании с нашей средой разработки программного обеспечения TMCL-IDE делает его очень универсальным эталонным дизайном для инструментов на конце руки », - сказал ДеАнгелис. Он добавил:«Помимо компактных размеров, еще одним важным фактором является очень легкий вес этого модуля в 24 грамма».
Как описал Прегер, блок-схема на рис. 1 показывает датчик нагрузки для определения силы, исходящей от руки, захвата или датчика приближения. TMCM-1617-GRIP-REF поддерживает промышленные протоколы связи EtherCAT, IO-Link и RS-485, а также предоставляет аналоговый сигнал и программно программируемые цифровые входы / выходы и может быть настроен с помощью интегрированной среды разработки Trinamic Motion Control Language (TMCL- IDE). «Мы предоставляем возможность связи RS-485 со скоростью 100 мегабит в секунду, которая по-прежнему популярна. Преимущество состоит в том, что это все еще традиционные высокоскоростные кабели, отвечающие требованиям этого приложения. "Это очень гибкий продукт с точки зрения коммуникации, поскольку это более традиционный подход к управлению двигателем", - сказал Прегер.
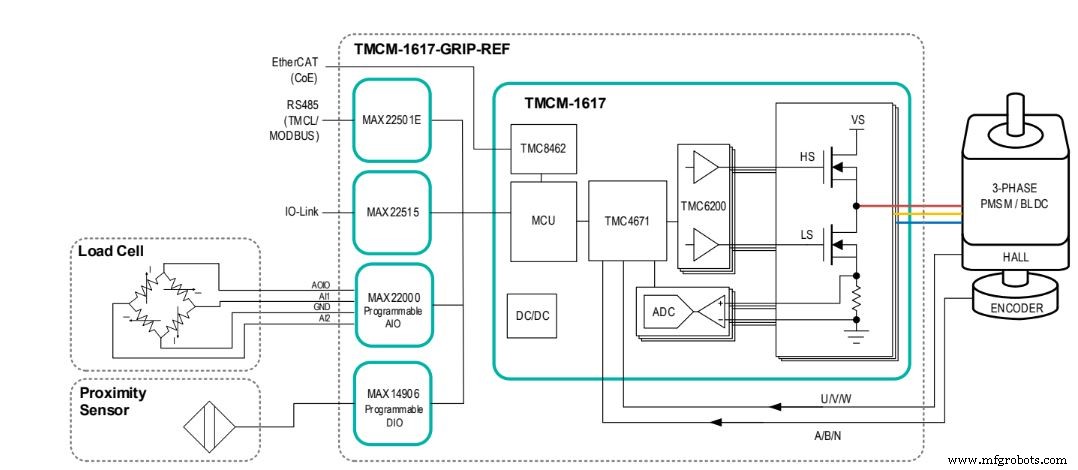
Рис. 1. Блок-схема TMCM-1617-GRIP-REF (Источник:Maxim Integrated)
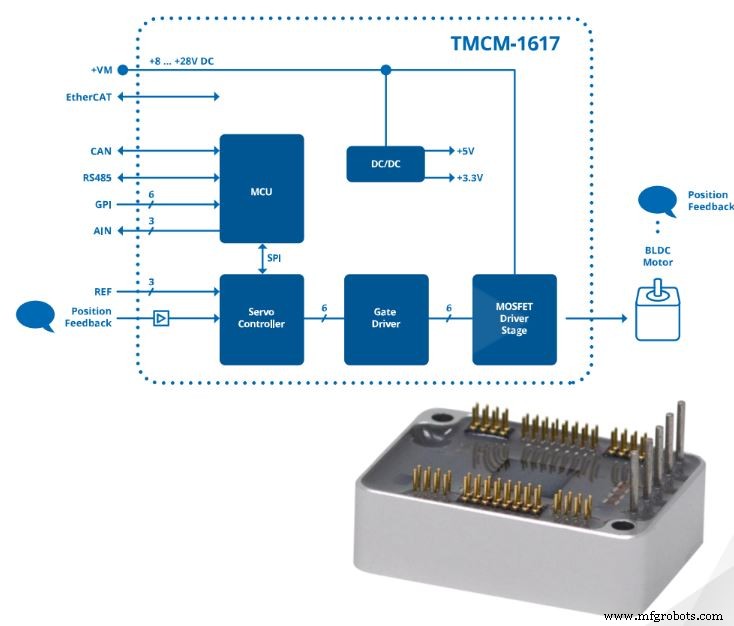
Рисунок 2:TMCM-1617 - наименьший сервоконтроллер (Источник:Maxim Integrated)
«Мы предоставляем все необходимые шины питания для поддержки внешних периферийных устройств и датчиков, не требуя дополнительного источника питания», - сказал Кубиш. Он добавил:«Безупречный контроль тока имеет наибольшее влияние на общую эффективность системы».
Maxim Integrated считает, что эталонный дизайн может повысить производительность в производственном цехе и вывести искусственный интеллект на передний план, благодаря современной архитектуре шины в сочетании с интегрированным управлением и диагностикой в едином решении. Например, встроенные функции MAX22515, такие как обширная интегрированная защита, обеспечивают надежную связь в суровых промышленных условиях. Все контакты линейного интерфейса IO-Link (V24, C / Q, DI и GND) защищены от обратного напряжения, короткого замыкания, горячего подключения и имеют встроенную защиту от перенапряжения ± 1,2 кВ / 500 Ом.
Что касается будущего управления двигателями и движением, возрастающая сложность в связи с требованием максимальной надежности приведет к большей интеллектуальности системы - и это должно быть периферийным, децентрализованным. Решения необходимо принимать в режиме реального времени, данные должны собираться в источнике и совместно использоваться в облаке.
Сервоконтроллер / драйвер TMCM-1321
TMCM-1321 - это одноосный контроллер / драйвер для 2-фазных биполярных шаговых двигателей со встроенным магнитным кодировщиком и цифровыми входами, предлагающий логику управления с обратной связью для оптимизации управления двигателем.
В Maxim Integrated отметили, что форм-фактор должен быть значительно меньше, чем у других решений, а плата поддерживает 256-кратное микрошаговое переключение при бесшумной работе. Встроенный магнитный энкодер можно использовать, когда к оси двигателя прикреплен подходящий магнит, что позволяет работать в замкнутом контуре. В качестве альтернативы можно подключить оптический кодировщик через цифровые входы ABN. Могут быть выбраны различные формы рампы. В дополнение к линейному нарастанию и линейному нарастанию Trinamic SixPoint ™, в модуле TMCM-1321 реализован S-образный наклон, который может ускорить фактическое время передачи.
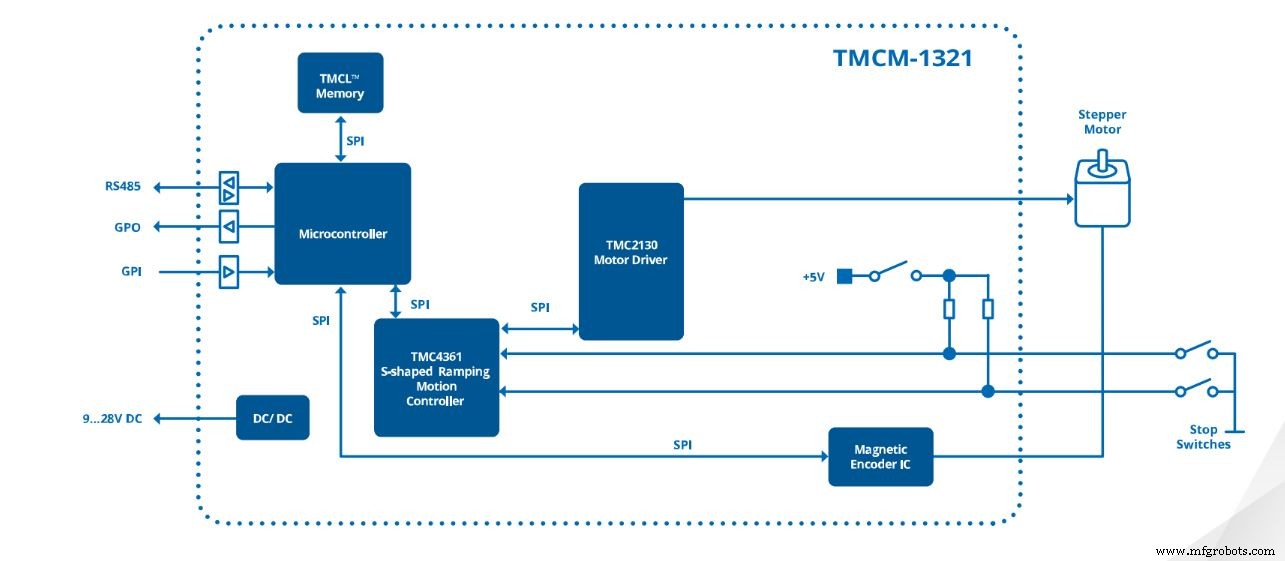
Рисунок 3:Блок-схема TMCM-1321 (Источник:Maxim Integrated)

Рисунок 4:Плата TMCM-1321 (Источник:Maxim Integrated)
TMCM-1321 был разработан для токов катушки до 0,7 A RMS и напряжения питания 24 В постоянного тока. Три цифровых входа могут использоваться как входы концевого выключателя и исходного выключателя или как входы общего назначения.
Управление двигателями и приводы имеют основополагающее значение во многих приложениях, поскольку они позволяют получить высокую степень точности, что, в свою очередь, приводит к снижению затрат и повышению эффективности. Жизненно важная функция, выполняемая схемой управления двигателем, заключается в обеспечении того, чтобы ротор при различных условиях работы и нагрузки занимал точное положение относительно обмоток, чтобы определить его местоположение с достаточной степенью точности.
>> Эта статья изначально была опубликована на нашем дочернем сайте Power Новости электроники.
Связанное содержание:
- Разработка элементов управления двигателями для робототехнических систем.
- Создание роботов с помощью Ada, часть 2 - Привод двигателей
- Решение проблем проектирования детерминированного многоосевого управления двигателем.
- Программное обеспечение упрощает разработку драйвера двигателя BLDC.
- Комплекты для разработчиков предлагают платформы для проектирования цифровых источников питания и управления двигателями.
- Разработка быстро реагирующей системы обратной связи для миниатюрных конструкций с моторным приводом.
Чтобы получить больше информации о Embedded, подпишитесь на еженедельную рассылку Embedded по электронной почте.
Встроенный
- Renesas расширяет возможности микроконтроллера для сервоуправления в промышленных роботах
- Интерфейсный модуль упрощает дизайн WI-Fi 6
- Разработка элементов управления двигателями для роботизированных систем
- Контроллер мотора объединяет ядро Arm Cortex-M0
- Интегрированные драйверы упрощают разработку шаговых двигателей
- Преимущества конвергенции промышленного управления
- Общие сведения о промышленных панелях управления
- Основы дизайна панели управления
- Что такое прототипирование промышленного образца?
- О промышленных двигателях и приложениях