


Полное руководство по позиционерам для робототехники
Думаете, вам может понадобиться роботизированный позиционер? Какой из них лучше для вас?
Существует огромный выбор позиционеров с различными осями, полезной нагрузкой и конфигурациями. Как определить, какой позиционер подойдет для вашего приложения?
Вот обзор роботов-позиционеров — что они из себя представляют и что вам нужно знать.
Достаточно сложно выбрать подходящего промышленного робота для вашего приложения. Вы, вероятно, просмотрели десятки различных моделей роботов, прежде чем нашли ту, которая лучше всего подходит для ваших нужд, ища лучший радиус действия робота, лучшую полезную нагрузку, лучший бренд.
Как только вы подумали, что со всеми вашими решениями покончено и вы можете приступить к автоматизации своего процесса, приходит новое решение:нужен ли мне роботизированный позиционер?
Если вы работаете с опытным интегратором роботов, у вас может возникнуть соблазн позволить ему решить за вас. Их опыт, безусловно, будет важен для того, чтобы помочь вам сделать правильный выбор. Тем не менее, вам все же стоит самостоятельно ознакомиться со всеми тонкостями роботизированных позиционеров.
При правильном использовании позиционеры могут значительно улучшить возможности манипулятора. Обладая даже небольшими знаниями, вы можете быть уверены, что получите максимальную отдачу от своего приложения для роботов.
В этой статье представлено общее руководство по позиционерам роботов, в котором достаточно информации для принятия обоснованного решения.
Что такое роботизированный позиционер?
Роботизированный позиционер (также известный как позиционер заготовки) — это программируемый механизм с одной или несколькими осями, который работает в унисон с промышленным роботом для расширения возможностей робота. Заготовка устанавливается на роботизированный позиционер и может управляться независимо от робота, что повышает его гибкость.
Позиционеры заготовки бывают разных размеров, типов и конфигураций. Они варьируются от простейших одноосевых поворотных столов до самых сложных индивидуальных комбинаций нескольких программируемых осей.
Основная цель позиционера заготовки — расширить рабочее пространство робота. Это делает их похожими на другие вспомогательные оси, где сам робот установлен на линейной направляющей, изогнутой направляющей или козловом кране. Однако, в отличие от этих вспомогательных осей, движущейся частью является сама заготовка, а не робот. Руководство по использованию автономного программирования с любой вспомогательной осью см. в нашей предыдущей статье.
Подходит ли ваше приложение для роботизированного позиционера?
Первое, что вы хотите определить, рассматривая позиционер, это подходит ли ваше приложение. Многие приложения для роботов не требуют дополнительных степеней свободы (DoF) и могут быть достигнуты с помощью одного робота.
Хороший способ начать думать об этом — спросить:«Ограничен ли я в настоящее время в этом приложении рабочей областью робота?»
Если это так, стоит подумать, может ли вам подойти позиционер (или другая вспомогательная ось).
Вероятно, наиболее распространенными областями применения позиционеров являются роботизированная сварка и роботизированная обработка. В этих задачах все 6 степеней свободы самого робота используются для точного позиционирования инструмента. Существует не так много возможностей для подхода к заготовке с другой стороны. В результате позиционер часто необходим при сварке или механической обработке деталей сложной геометрии.
Другие общие задачи включают покраску, покрытие и осмотр.
3 менее очевидных преимущества использования роботизированного позиционера
Расширение рабочего пространства робота, безусловно, является веской причиной для выбора позиционера. Однако есть и другие преимущества, которые менее очевидны:
- Параллельные процессы — Некоторые позиционеры позволяют устанавливать несколько заготовок на противоположных сторонах. Это позволяет выполнять две или более операций одновременно с несколькими роботами, как в этом примере от ABB.
5 распространенных типов роботизированных позиционеров
Существует множество типов роботизированных позиционеров, но вот наиболее распространенные:
1. Вертушки
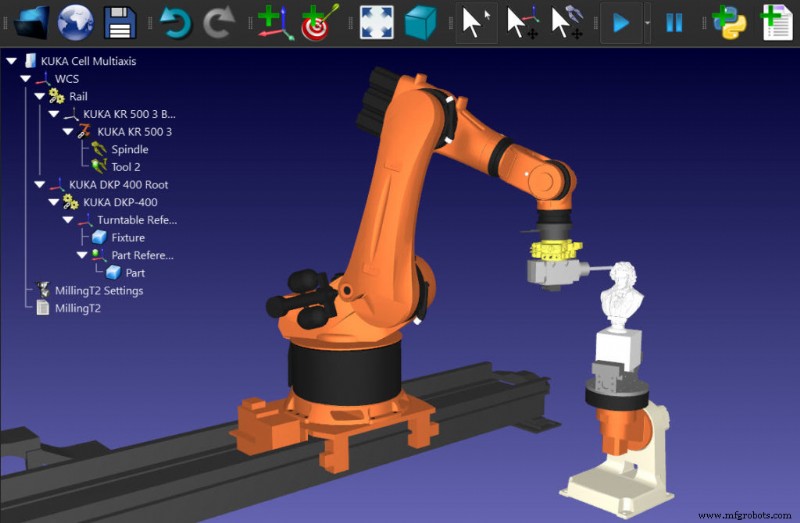
Самый простой тип позиционера, поворотные столы устанавливаются на пол или рабочий стол и вращают заготовку только вокруг одной оси (вертикальной оси). Они обычно используются при роботизированном фрезеровании, как мы видели в проекте Protolab с RoboDK (на этом видео поворотный стол не движется).
2. Одноосевой позиционер
Поворотный стол — это всего лишь особый тип одноосевого вращательного позиционера. Но одноосевые позиционеры существуют практически для любой ориентации. Чаще всего заготовку вращают вокруг горизонтальной оси аналогично токарному станку.
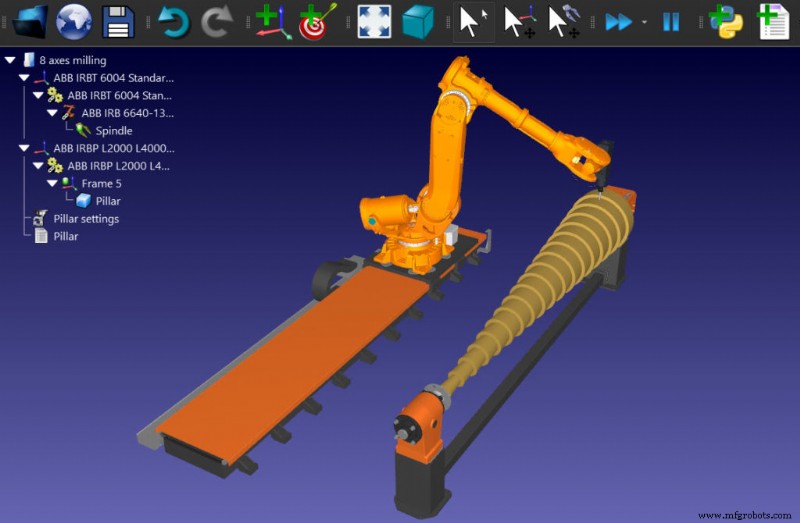
3. Передняя и задняя бабки
Если ваша заготовка слишком длинная или слишком тяжелая для одного позиционера, распространенный подход состоит в том, чтобы объединить два одноосевых позиционера, по одному на каждом конце заготовки (известные как передняя бабка и задняя бабка). Управление синхронизировано, поэтому их так же легко программировать, как одиночный позиционер.
4. Многоосевые позиционеры
Вот где это становится сложным. Вы можете найти позиционеры практически любой конфигурации и ориентации. Самые простые объединяют две программируемые оси на одном позиционере, самые сложные могут быть настроены практически с любым количеством осей.
5. 3-осевые позиционеры (колесо обозрения)
Очень распространенным типом многоосевого позиционера является «чертово колесо». Это включает в себя 3 программируемые оси, которые работают независимо. Для правильной работы их необходимо сбалансировать, имея одинаковый вес с обеих сторон, что обычно означает наличие двух заготовок одного типа.
Как выбрать лучший робот-позиционер
Лучший позиционер для вас будет зависеть от потребностей вашего приложения.
Вы захотите рассмотреть такие вопросы, как:
- Сколько места у нас есть для размещения робота и позиционера?
- Какова геометрия наших заготовок?
- Не слишком ли большие или тяжелые заготовки для одного позиционера?
- Какой стиль позиционера наиболее целесообразен?
- Какая полезная нагрузка требуется для позиционера?
После того, как вы определили лучший тип позиционера, посмотрите на различных производителей роботизированных позиционеров, чтобы найти подходящую модель.
RoboDK уже включает множество позиционеров от ABB и KUKA в нашу библиотеку роботов. Однако есть и другие поставщики позиционеров, которые мы с радостью интегрируем в RoboDK по запросу.
Вы также можете создавать свои собственные позиционеры и синхронизировать их с вашим роботом. С помощью программного обеспечения RoboDK вы также можете оптимизировать движение внешних осей в соответствии с вашими предпочтениями.
Как вы думаете, для какой задачи роботизированный позиционер может быть полезен? Расскажите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Полное руководство покупателя по покупке цифровой режущей машины
- Роботизированные позиционеры:понимание их важности при сварке
- Преимущества использования Robotic Vision для приложений автоматизации
- 5 Роботизированные приложения в аэрокосмической промышленности
- Социальные сети для производителей:полное руководство [электронная книга]
- Полное руководство по роботизированной сварке на производстве
- Полное руководство для роботизированных штабелеукладчиков
- Ultiboard — полное руководство для начинающих
- Протокол связи Bluetooth — Полное руководство по протоколу для учащихся
- Защита компьютеров для роботизированных приложений