


Роботизированные постпроцессоры:все, что вам нужно знать
Не знаете, какой постпроцессор выбрать? Вот 5 шагов для выбора идеального постпроцессора для роботов.
Постпроцессоры – это связующее звено между программным обеспечением для автономного программирования и вашим роботом.
Если вы выберете правильный постпроцессор, ваша программа будет работать "из коробки" — реальный робот будет двигаться точно так же, как в моделировании. Однако, если вы выберете неправильный постпроцессор, вас ждут трудные времена — робот может двигаться хаотично, в неправильном направлении или вообще не двигаться.
RoboDK предоставляет на выбор множество различных постпроцессоров. Стоит ознакомиться с тем, как работают постпроцессоры, как выбрать правильный и как настроить или создать свой собственный постпроцессор, если предоставленные вам не совсем подходят.
Эта статья расскажет вам все, что вам нужно знать о постпроцессорах роботов в RoboDK.
Что такое постпроцессор?
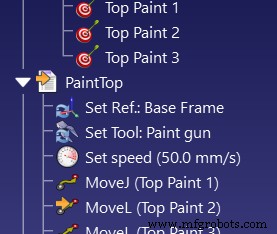
Большинство программ для роботов содержат одни и те же основные команды, которые используются снова и снова. Вот три наиболее распространенных:
- Переместить соединение — Это перемещает робота в точку в пространстве, отправляя суставы робота в нужное положение как можно быстрее, что полезно при перемещении в свободном пространстве.
- Линейное перемещение — Это перемещает робота из текущего положения в точку в пространстве, следуя точной линии, что полезно при перемещении, чтобы взять объект, нарисовать и т. д.
- Установить скорость — Это определяет скорость конечного эффектора и/или суставов робота.
Автономное программное обеспечение для программирования создает программы, используя обобщенную версию этих (и других) команд, которые можно применить к любому роботу.
Роботы говорят на разных языках
Проблема в том, что каждый производитель по-своему программирует команды для своих роботов. У многих производителей есть собственный язык программирования, а некоторые даже используют несколько разные команды для разных версий своих контроллеров.
Например, вот как три перечисленные выше команды выражаются для разных контроллеров роботов. В скобках я также указал минимальное количество параметров и значений, необходимых для управления роботом 6DoF:
| Робот | Совместное перемещение | Линейное перемещение | Установить скорость | Округление пути |
| ABB IRC5 | MoveJ (4) | MoveL (4) | скоростные данные(4) | данные зоны(4) |
| Fanuc RJ3 | J (2) | Д (2) | скорость (1) | CNT (1) |
| Кавасаки | JMOVE (1) | LMOVE (1) | СКОРОСТЬ (1) | ТОЧНОСТЬ (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Мотоман JBI | MOVJ (2) | МОВЛ (2) | VJ/V (1) | PL (1) |
| Универсальные роботы | движение (1) | переместить/переместить (1) | v(1) | r (1) |
Как видите, все команды одинаковы для всех типов роботов. Однако есть разница в формулировках и количестве информации, необходимой для определения каждой инструкции.
Без автономного программирования и постпроцессоров вам пришлось бы изучать совершенно новый язык программирования каждый раз, когда вы программируете новый тип робота. Это значительно замедляет программирование роботов.
Постпроцессоры упрощают работу
Постпроцессоры преобразуют команды в специальную программу для вашей модели робота.
С RoboDK вам не нужно изучать язык программирования, чтобы ваш робот двигался. Предоставленных постпроцессоров обычно достаточно для создания пригодного для использования кода без ошибок для более чем 30 марок роботов.
Постпроцессор также генерирует весь необходимый начальный код и определения переменных, которые часто неудобно определять в обычном текстовом программировании.
5 шагов для выбора идеального постпроцессора
RoboDK поставляется с более чем 40 постпроцессорами. Вы должны выбрать правильный постпроцессор для вашего контроллера робота.
Как выбрать между ними?
Если вы использовали одного из роботов из нашей библиотеки роботов, вы обнаружите, что один постпроцессор уже выбран по умолчанию. Часто предполагается, что вы используете последний контроллер (или контроллер по умолчанию) для этого робота. Тем не менее, вы можете обнаружить, что вам нужно выбрать другой, если сообщение по умолчанию не соответствует потребностям вашего приложения или настройки.

1. Выберите постпроцессор для своего робота
Обычно лучше сначала попробовать стандартный или самый простой постпроцессор.
Роботы некоторых марок имеют только одну опцию, предусмотренную по умолчанию в RoboDK, например. Mecademic, Kawasaki, CLOOS и т. д. В этом случае выбор очень прост.
2. Выберите постпроцессор для вашего контроллера
Роботы некоторых производителей имеют разные постпроцессоры для разных контроллеров или версий языка программирования. Например, у Denso есть один постпроцессор для своих старых контроллеров RC7 и один для новых контроллеров RC8, поскольку между этими моделями они перешли от программирования на языке программирования PAC к программированию на PacScript.
Используйте постпроцессор для конкретного контроллера, если он доступен. Если для вашего конкретного контроллера нет варианта, попробуйте тот, который ближе всего к номеру версии вашего контроллера.
3. Выберите постпроцессор для своего приложения
Роботы некоторых производителей имеют несколько разных постпроцессоров. У KUKA 10!
Некоторые дополнительные постпроцессоры предназначены для определенных приложений или настроек. Например, для контроллера KUKA KRC2 имеется 5 постпроцессоров. Два из них предназначены для приложений, использующих их фрезерную надстройку CamRob или систему ЧПУ KUKA, которая позволяет иметь тысячи строк кода в одном программном файле (подходит для роботизированной обработки). Один специально предназначен для дуговой сварки. Точно так же есть постпроцессор UR, в который интегрированы захваты Robotiq.
Если для вашего контроллера есть постпроцессор, подходящий для вашего конкретного приложения или настройки, используйте его. Однако, если для вашего приложения его нет, просто используйте базовый постпроцессор для вашего бренда и контроллера.
4. Выберите постпроцессор, который можно легко обновить
Иногда программа, созданная RoboDK, не совсем подходит для вашего приложения. Возможно, вы захотите добавить дополнительные строки кода для расширения функциональности. Это очень легко сделать, если вы немного знакомы с языком программирования вашего робота.
Некоторые постпроцессоры упрощают изменение и обновление сгенерированного кода.
Например, KUKA KRC2 имеет опции для создания файла DAT. Это интересная особенность контроллера KUKA. В этой конфигурации позиции сохраняются как переменные в отдельном файле DAT, что иногда упрощает обновление кода, поскольку для изменения позиций достаточно изменить только переменные.
Аналогично есть два постпроцессора Siemens Sinumerik:в одном позиции указываются в миллиметрах, а в другом — в дюймах.
Выберите постпроцессор, который максимально упрощает обновление кода робота, если это необходимо.
5. Создать или настроить постпроцессор
В некоторых случаях может потребоваться написать собственный постпроцессор, например, когда вы используете своего робота в уникальной конфигурации.
Вы также можете настроить существующий постпроцессор для своей конкретной установки или приложения.
В RoboDK очень легко писать пользовательские постпроцессоры, так как все они являются программами Python и написаны в похожем формате.
В этом видео вы можете увидеть простое руководство, в котором показано, как создать или обновить постпроцессор.
Подробнее см. на странице постпроцессора в нашей документации.
Какие у вас есть вопросы о постпроцессорах? Сообщите нам в комментариях ниже или присоединитесь к обсуждению ЛинкедИн , Твиттер , Фейсбук или Инстаграм .
Промышленный робот
- Облачные вычисления:все, что вам нужно знать
- Контейнеры против бессерверных; Все, что вам нужно знать!
- Техническое обслуживание на стороне:все, что вам нужно знать
- Все, что вам нужно знать о дисперсиях пигментов
- Стратегия планирования мощности - все, что вам нужно знать
- Все, что вам нужно знать об IoT в обслуживании
- 9 шагов к ковке ножа:все, что вам нужно знать
- Все, что вам нужно знать о технических чертежах
- Все, что вам нужно знать о литье металлов
- Ремонт промышленных сцеплений:все, что вам нужно знать