


Роботизированное бурение 101:как развернуть систему роботизированного бурения
Вы хотите развернуть роботизированную систему бурения на своем объекте. Что нужно знать, чтобы начать?
Возможно, вы не уверены, действительно ли роботизированное бурение подходит для вашей задачи. Обладают ли роботы достаточной производительностью для точного бурения?
Выбор роботизированного бурения по сравнению с другими альтернативами имеет различные преимущества, в том числе большую гибкость, сокращение времени ручного труда и более высокую эффективность. Но чтобы получить эти преимущества, вам нужно убедиться, что вы правильно развертываете робота.
В этой статье содержится краткое руководство, которое поможет вам начать бурение с помощью робота, не совершая наиболее распространенных ошибок.
Что такое роботизированное бурение?
Роботизированное бурение — это тип автоматизированной операции обработки, при которой сверлильный инструмент закрепляется на конце промышленного робота. В отличие от обычных сверлильных станков с числовым программным управлением (ЧПУ), роботы имеют большее рабочее пространство и могут обрабатывать более сложные формы.
Одним из основных преимуществ использования роботизированных систем бурения является их гибкость. При обычном сверлении с ЧПУ вы обычно ограничены сверлением в одной или двух плоскостях. Однако с помощью роботов вы можете сверлить практически в любом направлении, которое вам нравится.
Эта гибкость очень очевидна, когда вы смотрите на такие проекты, как художественные работы, созданные пользователями RoboDK Neoset Designs для художника Роберта Лонго несколько лет назад. Художественное произведение состояло из огромной металлической сферы, в которой были просверлены тысячи отверстий и которые были расположены через равные промежутки по всей поверхности.
Вы могли реализовать проект такого типа только с помощью роботизированного бурения. Ручное сверление было бы слишком трудоемким, а точность была бы непостоянной. Другие формы автоматизации бурения просто не смогут сверлить с таким количеством разных направлений.
Даже если ваши буровые проекты скромнее, эта гибкость может оказаться ценным преимуществом.
Действительно ли работает роботизированное бурение? Вопрос жесткости
Когда компании впервые рассматривают роботизированную обработку, общая проблема заключается в том, что не будет достаточной жесткости.
Обычные станки с ЧПУ имеют чрезвычайно жесткую механическую конструкцию. Жесткость станка с ЧПУ часто превышает 50 ньютонов на микрометр. Это позволяет им достигать очень высокой точности даже при обработке твердых материалов.

Роботы действительно имеют меньшую жесткость, чем обычные станки с ЧПУ. Руки промышленных роботов часто имеют жесткость всего 1 ньютон на микрометр. Это означает, что они могут выдерживать в 50 раз меньше усилий, чем обычные машины.
Что это означает на практике?
При больших усилиях и твердых материалах сверлильный инструмент робота будет отклоняться больше, чем у станка с ЧПУ. Это соответствует более низкой точности в таких случаях.
Является ли низкая жесткость проблемой? Это зависит от материала
Однако меньшая жесткость роботов по сравнению со станками с ЧПУ не обязательно является недостатком.
Даже самый жесткий станок с ЧПУ в мире будет в некоторой степени прогибаться. Вопрос в том, насколько допустимо отклонение.
При выборе системы роботизированного бурения необходимо обращать пристальное внимание на свойства материала. При правильном сочетании робота и материала заготовки вы можете гарантировать, что ваша роботизированная система сверления имеет достаточную жесткость для выбранной вами задачи.
Какой манипулятор робота лучше всего подходит для бурения?
Какой манипулятор промышленного робота выбрать для бурения?
Лучшим роботом для вас будет тот, который соответствует всем вашим критериям производительности, но не выходит за рамки вашего бюджета.
Многие модели роботов подходят для сверления некоторых материалов. Однако только некоторые из них подходят для материала, с которым вы работаете, и требований к производительности вашей задачи.
Факторы, влияющие на бурение с помощью робота, включают:
- Жесткость робота, как мы объяснили выше.
- Как робот справляется с вибрациями.
- Параметры концевых эффекторов для роботизированной обработки.
- Параметры программирования для робота.
Самый быстрый и простой способ оценить все эти факторы — обратиться к дистрибьютору или интегратору роботов. Они будут хорошо знакомы со своим каталогом моделей роботов и поймут, какая из них подходит для ваших нужд.
Такие свойства, как жесткость, не часто указываются в спецификациях промышленных роботов. Существуют различные аналитические методы, которые можно использовать для расчета жесткости манипулятора робота, но обычно лучше просто обратиться к производителю.
Как развернуть роботизированную систему бурения
Процесс развертывания роботизированного бурения очень похож на другие проекты роботизированной обработки.
Вы должны начать с оценки потребностей вашей задачи и сравнения различных роботов на рынке. Вы можете использовать нашу библиотеку роботов, чтобы сузить круг роботов с определенными характеристиками (такими как воспроизводимость и полезная нагрузка), но вам нужно будет запросить у производителя подробности о жесткости.
Когда вы определились со своим роботом, следующим выбором будет ваш концевой эффектор робота. Для этого можно использовать обрабатывающий или сверлильный шпиндель.
Наконец, вам нужно будет запрограммировать робота…
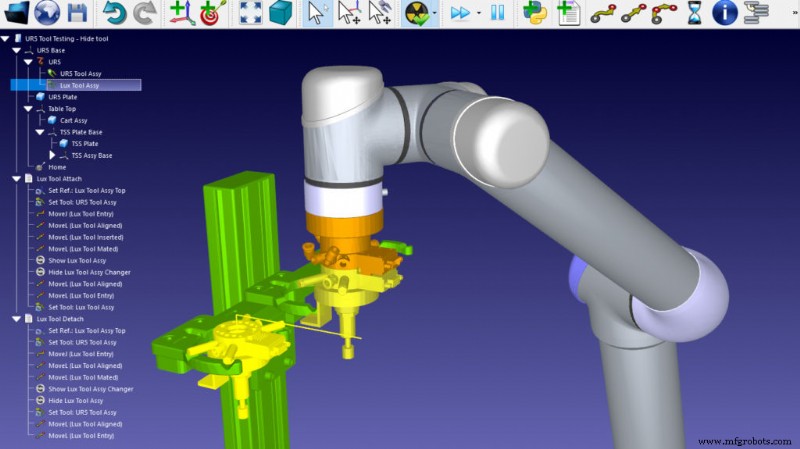
Программирование робота-сверлильного станка
Распространенной проблемой при программировании системы роботизированного бурения является большое количество точек в операции бурения.
В отличие от сварки, вы не можете просто указать роботу двигаться по прямой линии. Вы должны направить робота на каждое отверстие на поверхности заготовки. Это может сильно усложнить программирование.
Вы можете значительно ускорить программирование, используя инструмент программирования, который включает точечное программирование.
Например, мастер PointFollow RoboDK позволяет загружать набор точек сверления в виде простого текстового файла. Он также имеет возможность автоматически превращать кривую или прямую траекторию в набор регулярно расположенных отверстий для сверления.
Вы можете узнать, как программировать программы сверления с помощью этой функции, на нашей странице документации.
Какой аспект роботизированного бурения для вас наиболее сложен? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Как роботы-распылители улучшают согласованность
- Как роботы-рисовальщики сокращают количество доработок
- Как робот достигает полной автономии?
- Как развернуть приложения Java EE в Azure
- Как развернуть DevOps в облаке
- Как создать платформу для роботов Arduino + Raspberry Pi
- Технический документ:как определить потенциал своего робота
- Система складирования роботов:что это такое и как используется
- Полное руководство:как выбрать правильный робот SCARA
- Как сократить время обучения роботизированной сварке