


Разница между декартовыми, шестиосевыми и SCARA-роботами
Декартовы, шестиосевые и роботы SCARA все относятся к разным типам промышленных роботов . Обрабатывающие отрасли переходят на использование промышленных роботов в своем производстве, и все три типа роботов активно используются. Каждый из них был разработан уникальным образом, что позволяет ему выполнять определенную задачу, которую другой, вероятно, не сможет выполнить.
Время производства теперь сокращается, поскольку роботы могут работать без остановки в течение нескольких часов без необходимости делать даже один перерыв. Добавьте к этому их скорость и точность, и вы увидите будущее, в котором человеческий труд на производственных предприятиях больше не понадобится. Источник:Pinterest
На первый взгляд эти роботы могут выглядеть одинаково для неподготовленного глаза, но они идут глубже. Большинство из них могут иметь одинаковую форму, но их конструкция и выполняемые ими функции совершенно разные.
Прежде чем разбирать то, что отличает трех роботов, важно знать, что это за каждый из них в первую очередь. Источник:Pinterest
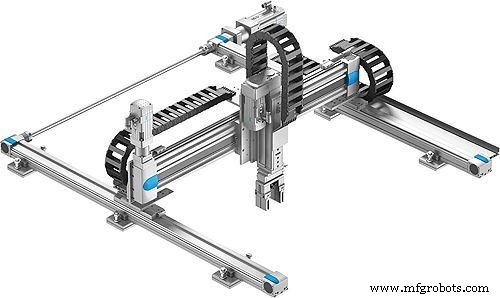
Декартовы роботы иногда называют портальными роботами , и они относятся к типу, который работает от потолочной сети и использует линейные приводы и двигатели для позиционирования инструментов. Он имеет рабочий конверт прямоугольной формы, размер которого зависит от размера сетки. Декартовы роботы обладают трехмерным движением; их жесткость делает их очень точными во время работы. Они широко используются в качестве роботов-погрузчиков . и машинная покраска. Источник:Pinterest
Шестиосевой робот это тип, который установлен на пьедестале, позволяя использовать его роботизированный манипулятор чтобы иметь больше движений во всех направлениях и лучший контроль, чем у двух других роботов. Как следует из названия, 6-осевой робот имеет шесть осей, которые перемещаются в трехмерном пространстве, позволяя ему позиционировать себя как угодно. Их высокая гибкость делает их идеальным заводским роботизированным манипулятором . для сварочных работ, как роботизированный штабелеукладчик , и как робот для ухода за станками .
Робот SCARA входит в число лучших промышленных роботов . Он имеет круглую рабочую зону и установлен на пьедестале с использованием четырехосного манипулятора . двигаться по трехмерной плоскости. В конце плоскости у них есть нечто, называемое тета-осью, которая придает им большую гибкость, функция, которая делает их хорошими роботами-палетоукладчиками, машинами для загрузки и разгрузки, а также роботом для сборки мелких деталей .
Так чем же именно декартовы, шестиосевые и SCARA-роботы отличаются друг от друга? Чтобы лучше отличать их друг от друга, мы будем использовать следующие параметры. Источник:Pinterest
Максимальная полезная нагрузка для каждого робота варьируется в зависимости от размера робота и задачи, для которой он был разработан. Как правило, для большинства роботов-манипуляторов , грузоподъемность робота должна превышать общий вес полезной нагрузки. Исходя из этого, декартовы роботы лучше справляются с более тяжелой нагрузкой по сравнению с двумя другими. Для роботов SCARA и Six-Axis они ограничены, потому что они поддерживают нагрузки на своих расширенных роботизированных манипуляторах . .
Для декартова робота автоматизация захвата и размещения выдерживать большие нагрузки легко, потому что его подшипники и опорные рамы способны выдерживать весь диапазон движений. Чтобы лучше проиллюстрировать эту мысль, представьте себе груз в 110 фунтов. Вес вполне соответствует диапазону полезной нагрузки всех трех роботов; однако 110 фунтов - это верхний предел возможностей SCARA; поэтому потребуется больше элементов управления и дополнительных деталей для обработки результирующего крутящего момента.
Но с декартовым роботом система поддержки позволяет ему легко справляться с той же нагрузкой без необходимости в дополнительной помощи или компонентах, что делает его идеальным промышленным роботом для захвата и размещения . Источник:Pinterest
Ориентация - еще одна область, которая отличает роботов друг от друга. Когда дело доходит до ориентации, можно выделить два основных момента.
Здесь цель состоит в том, чтобы совместить след робота с его рабочей зоной. Например, если робот с шестью осями или робот SCARA вызывает серьезные препятствия во время работы, то использование таких роботов не идеально в этой ситуации. Однако, если для движения требуется наименьшее количество осей, то лучше использовать декартова робота, поскольку его можно установить над головой, оставив внизу достаточно места для других вещей.
В то же время, если рассматриваемая задача включает сложную обработку или это работа, требующая большего количества осей, тогда SCARA Робот, который может занимать наименьшее количество места, но при этом использовать наибольшее количество осей, будет лучшим вариантом. Ориентация во многом зависит от помещения и характера выполняемой задачи. Источник:Pinterest
Высокоскоростной робот-манипулятор является важным фактором при дифференциации промышленных роботов . Для некоторых задач требуется высокая скорость, а для других требуется точность, чтобы иметь приоритет. Скорость робота не ограничивается только его работой с материалами; это также основано на расстоянии, которое он проходит в отведенном для этого месте.
Декартовы роботы могут развивать скорость около 5 м / сек, а иногда даже больше, если они меньше и маневренны. Роботы SCARA и Six-Axis намного медленнее по сравнению с этим. Еще одна особенность, которая делает декартовых роботов превосходными в этом отношении, заключается в том, что их можно модифицировать для преодоления большего расстояния на более высоких скоростях, если они соединены в пару с помощью правильной ставки, шарико-винтового привода или линейного двигателя.
Декартовы роботы прикреплены к гибкой подвесной балке . , которые могут быть увеличены на большие расстояния, что делает их хорошими типами промышленных роботов . С другой стороны, роботы SCARA и Six-Axis закреплены на пьедесталах, которые редко двигаются.
Что касается точности, роботы SCARA и Six-Axis немного более точны, чем их декартовы аналоги. Чтобы декартовы роботы могли синхронизировать такой же уровень точности, они должны быть оснащены дополнительными компонентами и деталями, которые улучшают эту функцию. Указанные части включают в себя приводы с шарико-винтовой передачей и прецизионные столы с шариковыми рельсовыми направляющими.
В то же время бывают случаи, когда роботы SCARA и Six-Axis не могут поддерживать свою точность из-за роботизированной руки прогиб. В подобных случаях декартовы роботизированные руки с высокоточными линейными подшипниками, которые сводят к минимуму прогиб, позволяющий более точно позиционировать концевой эффектор, являются лучшим вариантом. В конечном итоге скорость каждого из этих роботов зависит от решаемой задачи. Источник:Pinterest
Рабочая среда и существующие опасности - это еще два фактора, которые можно использовать, чтобы отделить этих трех роботов друг от друга. Для SCARA и 6-осевых роботов , их тумбы компактны, что позволяет им занимать минимум места; однако этот фиксированный характер может сделать их устаревшими в среде, где опорная рама робота может быть установлена над головой, как в случае с декартовым роботом.
Пыль и грязь также влияют на тип робота, с которым люди предпочитают работать. Роботы SCARA и Six-Axis более подвержены воздействию пыли, чем декартовы роботы, которые используют больше движений. Роботов можно накрыть, чтобы минимизировать коррозию от пыли и, прежде всего, их движущихся частей, но это в конечном итоге будет препятствовать эффективному движению.
Рассмотрев различия, которые отличают SCARA, шестиосевой робот-манипулятор , и декартовых роботов, также важно знать производителей, стоящих за их творениями. Ниже приведены некоторые из ведущих производителей промышленных роботов-манипуляторов . в мире. Источник:Epson
EPSON - производитель роботов, который работает в этом бизнесе более 35 лет. Они наиболее известны благодаря первоклассным шестиосевым роботам . которые оснащены самыми передовыми технологиями роботов, не считая их способности обрабатывать огромные полезные нагрузки. Их шестиосевые роботы имеют полезную нагрузку около 10 фунтов и роботизированный манипулятор . досягаемость от 450 мм до 1480 мм. Программное обеспечение EPSON RC +, которое используется во всех их роботах, имеет функции Vision и Force Guidance для улучшения функциональности.
EVS - мировой лидер в области создания промышленных роботов. Как ведущий производитель роботов SCARA Среди их выдающихся продуктов модели SCARA являются одними из самых передовых в отрасли. В их каталоге представлены два усовершенствованных робота SCARA:один меньшего размера с полезной нагрузкой 5 фунтов и радиусом действия руки 400 мм, а также гораздо больший с полезной нагрузкой 8 фунтов и радиусом действия руки 600 мм.
Большинство роботов-манипуляторов EVS пользуются большим спросом во всем мире и широко используются в автомобильной и аэрокосмической промышленности благодаря своей высокой скорости, передовым технологиям и оригинальному дизайну. Источник:yamaha- motor.com
Yamaha Motor Corporation - ведущий мировой производитель декартовых роботов. Корпорация Yamaha, в основном известная своими супербайками, которые используются во многих международных гонках, также является крупным производителем и поставщиком промышленных роботов . с особым вниманием к картезианским. В их каталоге представлены декартовы роботы всех типов. Компания также производит роботов SCARA . и одноосные.
По мере того, как колеса технологий продолжают вращаться, более совершенные версии промышленных роботов продолжают выходить каждый год. С каждой новой моделью слабые места, которые преследовали предыдущие версии, становятся все меньше и меньше. Это только вопрос времени, когда все аспекты человеческой жизни будут полностью зависеть от промышленных роботов. Будет ли это хорошо или плохо, еще предстоит определить. 
Содержание
Что такое декартовы роботы, роботы с шестью осями и роботы SCARA?

Декартовы роботы
Шестиосевой робот

Робот SCARA

Различия между декартовыми, шестиосными и SCARA-роботами
Грузоподъемность

Ориентация

Скорость и перемещение

Точность позиционирования

Среда

Ведущие производители промышленных роботов

EPSON

EVS

Yamaha Motor Corporation

Заключение
Промышленный робот
- В чем реальная разница между автономным роботом и HMI?
- Разница между асбестом и стекловолокном
- Разница между структурой и объединением
- Разница между С и С++
- Разница между C и Java
- Python против JavaScript:разница между JavaScript и Python
- Python против Ruby:разница между Ruby и Python
- Разница между двигателями постоянного и переменного тока
- Разница между пайкой и пайкой
- Разница между 2-тактным и 4-тактным двигателями