


Что такое МЭМС? Акселерометр, гироскоп и магнитометр на Arduino
<основной класс="главный сайт" id="главный">
В этом руководстве мы узнаем, как работают акселерометр, гироскоп и магнитометр MEMS и как использовать их с платой Arduino. Также с помощью Processing IDE мы создадим несколько практических приложений с использованием датчиков. Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Что такое МЭМС?
МЭМС — это очень маленькие системы или устройства, состоящие из микрокомпонентов размером от 0,001 мм до 0,1 мм. Эти компоненты изготовлены из кремния, полимеров, металлов и/или керамики и обычно объединяются с ЦП (микроконтроллером) для завершения системы.
Теперь мы кратко объясним, как работает каждый из этих датчиков микроэлектромеханических систем (МЭМС).
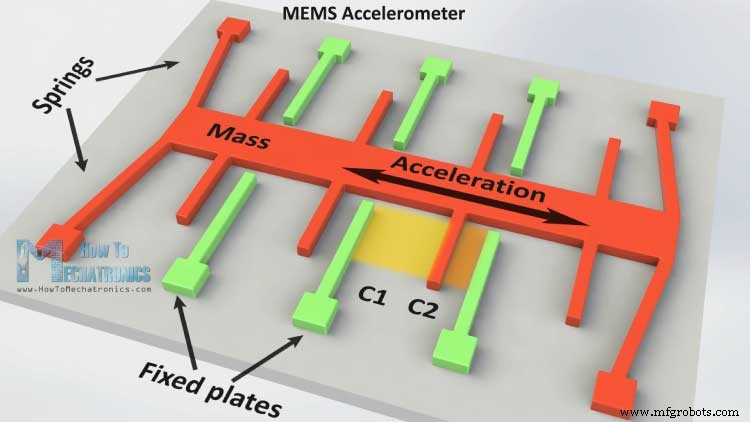
МЭМС-акселерометр
Он измеряет ускорение путем измерения изменения емкости. Его микроструктура выглядит примерно так. Он имеет массу, прикрепленную к пружине, которая может двигаться в одном направлении, и фиксированные внешние пластины. Таким образом, когда будет приложено ускорение в определенном направлении, масса будет двигаться, и емкость между пластинами и массой изменится. Это изменение емкости будет измерено, обработано и будет соответствовать определенному значению ускорения.
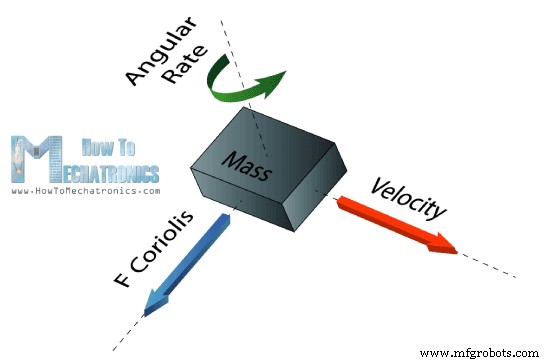
МЭМС-гироскоп
Гироскоп измеряет угловую скорость с помощью эффекта Кориолиса. Когда масса движется в определенном направлении с определенной скоростью и при приложении внешней угловой скорости, как показано зеленой стрелкой, возникает сила, как показано сине-красной стрелкой, которая вызывает перпендикулярное смещение массы. Подобно акселерометру, это смещение вызовет изменение емкости, которое будет измерено, обработано и будет соответствовать определенной угловой скорости.
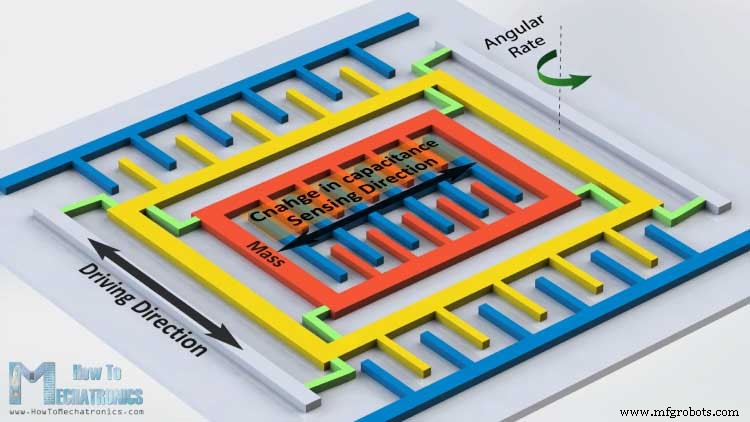
Микроструктура гироскопа выглядит примерно так. Масса, которая постоянно движется или колеблется, и когда будет применена внешняя угловая скорость, гибкая часть массы будет двигаться и совершать перпендикулярное смещение.
Магнитометр MEMS
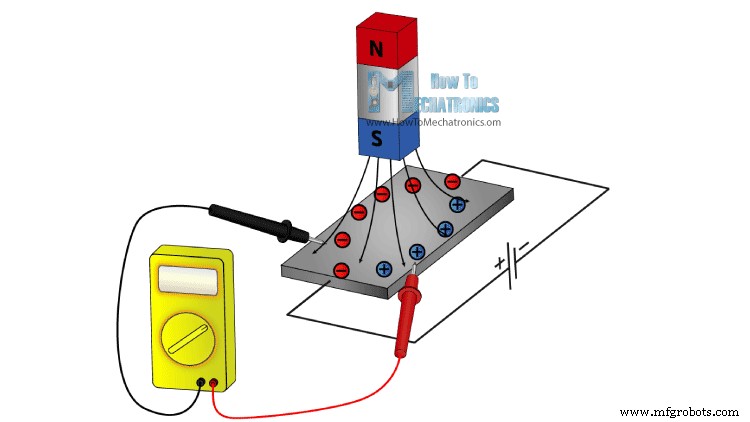
Он измеряет магнитное поле Земли с помощью эффекта Холла или магниторезистивного эффекта. На самом деле почти 90% датчиков на рынке используют эффект Холла, и вот как это работает.
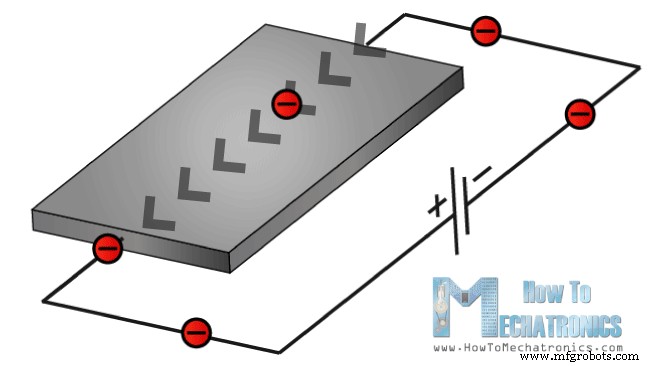
Если у нас есть проводящая пластина, как показано на фотографии, и мы запустим ток через нее, электроны будут течь прямо с одной стороны пластины на другую. Теперь, если мы поднесем некоторое магнитное поле к пластине, мы нарушим прямолинейный поток, и электроны отклонятся к одной стороне пластины, а положительные полюса — к другой стороне пластины. Это означает, что если мы сейчас поместим метр между этими двумя сторонами, мы получим некоторое напряжение, которое зависит от напряженности магнитного поля и его направления.
Остальные 10% датчиков на рынке используют магниторезистивный эффект. В этих датчиках используются материалы, чувствительные к магнитному полю, обычно состоящие из железа (Fe) и никеля (Ne). Поэтому, когда эти материалы подвергаются воздействию магнитного поля, они меняют свое сопротивление.
Датчики Arduino и MEMs
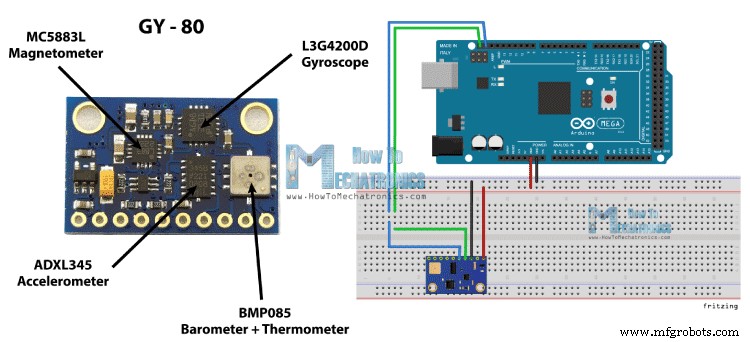
Хорошо, теперь давайте подключим эти датчики к плате Arduino и используем их. В качестве примера я буду использовать коммутационную плату GY-80 со следующими датчиками:3-осевой акселерометр ADXL345, 3-осевой гироскоп L3G4200D, 3-осевой магнитометр MC5883L, а также барометр и термометр, которые мы не будем использовать в этом руководстве.
Вы можете получить эти компоненты на любом из следующих сайтов:
- 3-осевой ускоритель ADXL345………………………………………………………
- 2 в 1:6-осевой гироскоп и акселерометр MPU6050…………………
- 3 в 1:9-осевой гироскоп ускорения магнитного поля GY-80……… Amazon
- 3 в 1:модуль GY-86 10DOF MS5611 HMC5883L MPU6050……… Banggood / AliExpress
Эта плата использует протокол связи I2C, что означает, что мы можем использовать все датчики всего с двумя проводами. Таким образом, чтобы установить связь между Arduino и датчиками, нам нужно знать их уникальные адреса устройств и адреса их внутренних регистров для получения от них данных. Эти адреса можно найти в даташитах датчиков:
- Акселерометр ADXL345 Техническое описание
- L3G4200D Гироскоп Техническое описание
- MC5883L Магнитометр Техническое описание
Для получения более подробной информации о том, как работает связь I2C, вы можете ознакомиться с моим другим учебным пособием по протоколу связи I2C.
Исходный код
Теперь посмотрим коды для получения данных с датчиков. Мы начнем с акселерометра, перед каждым кодом будет пояснение, а также дополнительное описание в комментариях к коду.
Код акселерометра Arduino
Сначала нам нужно подключить Arduino Wire Library и определить адреса регистров датчика. В разделе настройки нам нужно инициировать Wire Library и запустить последовательную связь, так как мы будем использовать последовательный монитор для отображения результатов. Также здесь нам нужно активировать датчик или включить измерение, отправив соответствующий байт в регистр Power_CTL, и вот как мы это делаем. Используя функцию Wire.beginTransmission(), мы выбираем, с каким датчиком мы будем общаться, в данном случае с 3-осевым акселерометром. Затем с помощью функции Wire.write() мы сообщаем, к какому внутреннему регистру мы будем обращаться. После этого мы отправим соответствующий байт для включения измерения. Используя функцию Wire.endTransmission(), мы закончим передачу, и это передаст данные в регистры.
В секции цикла нам нужно прочитать данные для каждой оси. Мы начнем с оси X. Итак, сначала мы выберем, с какими регистрами мы будем разговаривать, в данном случае с двумя внутренними регистрами оси X. Затем с помощью функции Wire.requestFrom() мы будем запрашивать передаваемые данные или два байта из двух регистров. Провод.доступный() функция вернет количество байтов, доступных для извлечения, и, если это число совпадает с запрошенными байтами, в нашем случае 2 байта, используя Wire.read() функцией мы будем считывать байты из двух регистров оси X.
Выходные данные из регистров представляют собой дополнение до двух, где X0 – младший значащий байт, а X1 – старший значащий байт, поэтому нам нужно преобразовать эти байты в значения с плавающей запятой от -1 до +1 в зависимости от направления относительно оси X. к ускорению Земли или гравитации. Мы повторим эту процедуру для двух других осей и в конце выведем эти значения на серийный монитор.
#include <Wire.h>
//--- Accelerometer Register Addresses
#define Power_Register 0x2D
#define X_Axis_Register_DATAX0 0x32 // Hexadecima address for the DATAX0 internal register.
#define X_Axis_Register_DATAX1 0x33 // Hexadecima address for the DATAX1 internal register.
#define Y_Axis_Register_DATAY0 0x34
#define Y_Axis_Register_DATAY1 0x35
#define Z_Axis_Register_DATAZ0 0x36
#define Z_Axis_Register_DATAZ1 0x37
int ADXAddress = 0x53; //Device address in which is also included the 8th bit for selecting the mode, read in this case.
int X0,X1,X_out;
int Y0,Y1,Y_out;
int Z1,Z0,Z_out;
float Xa,Ya,Za;
void setup() {
Wire.begin(); // Initiate the Wire library
Serial.begin(9600);
delay(100);
Wire.beginTransmission(ADXAddress);
Wire.write(Power_Register); // Power_CTL Register
// Enable measurement
Wire.write(8); // Bit D3 High for measuring enable (0000 1000)
Wire.endTransmission();
}
void loop() {
// X-axis
Wire.beginTransmission(ADXAddress); // Begin transmission to the Sensor
//Ask the particular registers for data
Wire.write(X_Axis_Register_DATAX0);
Wire.write(X_Axis_Register_DATAX1);
Wire.endTransmission(); // Ends the transmission and transmits the data from the two registers
Wire.requestFrom(ADXAddress,2); // Request the transmitted two bytes from the two registers
if(Wire.available()<=2) { //
X0 = Wire.read(); // Reads the data from the register
X1 = Wire.read();
/* Converting the raw data of the X-Axis into X-Axis Acceleration
- The output data is Two's complement
- X0 as the least significant byte
- X1 as the most significant byte */
X1=X1<<8;
X_out =X0+X1;
Xa=X_out/256.0; // Xa = output value from -1 to +1, Gravity acceleration acting on the X-Axis
}
// Y-Axis
Wire.beginTransmission(ADXAddress);
Wire.write(Y_Axis_Register_DATAY0);
Wire.write(Y_Axis_Register_DATAY1);
Wire.endTransmission();
Wire.requestFrom(ADXAddress,2);
if(Wire.available()<=2) {
Y0 = Wire.read();
Y1 = Wire.read();
Y1=Y1<<8;
Y_out =Y0+Y1;
Ya=Y_out/256.0;
}
// Z-Axis
Wire.beginTransmission(ADXAddress);
Wire.write(Z_Axis_Register_DATAZ0);
Wire.write(Z_Axis_Register_DATAZ1);
Wire.endTransmission();
Wire.requestFrom(ADXAddress,2);
if(Wire.available()<=2) {
Z0 = Wire.read();
Z1 = Wire.read();
Z1=Z1<<8;
Z_out =Z0+Z1;
Za=Z_out/256.0;
}
// Prints the data on the Serial Monitor
Serial.print("Xa= ");
Serial.print(Xa);
Serial.print(" Ya= ");
Serial.print(Ya);
Serial.print(" Za= ");
Serial.println(Za);
}
Code language: Arduino (arduino)Код гироскопа Arduino
Для получения данных с гироскопа у нас будет код, аналогичный предыдущему. Итак, сначала мы должны определить адреса регистров и некоторые переменные для данных. В разделе настройки мы должны разбудить и перевести датчик в нормальный режим с помощью CTRL_REG1, а также выбрать чувствительность датчика. Для этого примера я выберу режим чувствительности 2000 кадров в секунду.
В секции цикла, похожей на акселерометр, мы будем считывать данные для осей X, Y и Z. Затем необработанные данные необходимо преобразовать в значения углов. Из таблицы данных датчика видно, что для режима чувствительности 2000dps соответствует единица измерения 70 mdps/разряд. Это означает, что мы должны умножить необработанные выходные данные на 0,07, чтобы получить угловую скорость в градусах в секунду. Затем, если умножить угловую скорость на время, это даст нам значение угла. Итак, нам нужно рассчитать временной интервал каждой секции цикла, и мы можем сделать это, используя функцию millis() в верхней и нижней части секции цикла, и мы сохраним ее значение в этой переменной «dt». Таким образом, для каждого выполненного цикла мы будем вычислять угол и добавлять его к конечному значению угла. Мы сделаем то же самое для двух других осей и в конце выведем результаты в серийный монитор.
#include <Wire.h>
//--- Gyro Register Addresses
#define Gyro_gX0 0x28
#define Gyro_gX1 0x29
#define Gyro_gY0 0x2A
#define Gyro_gY1 0x2B
#define Gyro_gZ0 0x2C
#define Gyro_gZ1 0x2D
int Gyro = 0x69; //Device address in which is also included the 8th bit for selecting the mode, read in this case.
int gX0, gX1, gX_out;
int gY0, gY1, gY_out;
int gZ0, gZ1, gZ_out;
float Xg,Yg,Zg;
float angleX,angleY,angleZ,angleXc,angleYc,angleZc;
unsigned long start, finished, elapsed;
float dt=0.015;
void setup()
{
Wire.begin();
Serial.begin(9600);
delay(100);
Wire.beginTransmission(Gyro);
Wire.write(0x20); // CTRL_REG1 - Power Mode
Wire.write(15); // Normal mode: 15d - 00001111b
Wire.endTransmission();
Wire.beginTransmission(Gyro);
Wire.write(0x23); // CTRL_REG4 - Sensitivity, Scale Selection
Wire.write(48); // 2000dps: 48d - 00110000b
Wire.endTransmission();
}
void loop()
{
start=millis();
//---- X-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gX0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gX0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gX1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gX1 = Wire.read();
}
//---- Y-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gY0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gY0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gY1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gY1 = Wire.read();
}
//---- Z-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gZ0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gZ0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gZ1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gZ1 = Wire.read();
}
//---------- X - Axis
// Raw Data
gX1=gX1<<8;
gX_out =gX0+gX1;
// From the datasheet: 70 mdps/digit
Xg=gX_out*0.07; // Angular rate
// Angular_rate * dt = angle
angleXc = Xg*dt;
angleX = angleX + angleXc;
//---------- Y - Axis
gY1=gY1<<8;
gY_out =gY0+gY1;
Yg=gY_out*0.07;
angleYc = Yg*dt;
angleY = angleY + angleYc;
//---------- Z - Axis
gZ1=gZ1<<8;
gZ_out =gZ0+gZ1;
Zg=gZ_out*0.07;
angleZc = Zg*dt;
angleZ = angleZ + angleZc;
// Prints the data on the Serial Monitor
Serial.print("angleX= ");
Serial.print(angleX);
Serial.print(" angleY= ");
Serial.print(angleY);
Serial.print(" angleZ= ");
Serial.println(angleZ);
delay(10);
// Calculating dt
finished=millis();
elapsed=finished-start;
dt=elapsed/1000.0;
start = elapsed = 0;
}Code language: Arduino (arduino)Код магнитометра Arduino
Снова воспользуемся техникой, аналогичной предыдущей. Сначала нам нужно определить адреса регистров, и в разделе настройки установить датчик в режим непрерывного измерения. В разделе цикла мы получим необработанные данные для каждой оси тем же методом, что и для предыдущих датчиков.
Затем нам нужно преобразовать необработанные данные в значение магнитного поля или единицы Гаусса. Из таблицы данных датчика видно, что режим чувствительности по умолчанию составляет 0,92 мГс/цифру. Это означает, что нам нужно умножить необработанные данные на 0,00092, чтобы получить магнитное поле Земли в единицах Гаусса. В конце мы выведем значения на серийный монитор.
#include <Wire.h> //I2C Arduino Library
#define Magnetometer_mX0 0x03
#define Magnetometer_mX1 0x04
#define Magnetometer_mZ0 0x05
#define Magnetometer_mZ1 0x06
#define Magnetometer_mY0 0x07
#define Magnetometer_mY1 0x08
int mX0, mX1, mX_out;
int mY0, mY1, mY_out;
int mZ0, mZ1, mZ_out;
float Xm,Ym,Zm;
#define Magnetometer 0x1E //I2C 7bit address of HMC5883
void setup(){
//Initialize Serial and I2C communications
Serial.begin(9600);
Wire.begin();
delay(100);
Wire.beginTransmission(Magnetometer);
Wire.write(0x02); // Select mode register
Wire.write(0x00); // Continuous measurement mode
Wire.endTransmission();
}
void loop(){
//---- X-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mX1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mX0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mX0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mX1 = Wire.read();
}
//---- Y-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mY1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mY0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mY0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mY1 = Wire.read();
}
//---- Z-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mZ1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mZ0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mZ0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mZ1 = Wire.read();
}
//---- X-Axis
mX1=mX1<<8;
mX_out =mX0+mX1; // Raw data
// From the datasheet: 0.92 mG/digit
Xm = mX_out*0.00092; // Gauss unit
//* Earth magnetic field ranges from 0.25 to 0.65 Gauss, so these are the values that we need to get approximately.
//---- Y-Axis
mY1=mY1<<8;
mY_out =mY0+mY1;
Ym = mY_out*0.00092;
//---- Z-Axis
mZ1=mZ1<<8;
mZ_out =mZ0+mZ1;
Zm = mZ_out*0.00092;
//Print out values of each axis
Serial.print("x: ");
Serial.print(Xm);
Serial.print(" y: ");
Serial.print(Ym);
Serial.print(" z: ");
Serial.println(Zm);
delay(50);
}Code language: Arduino (arduino)Вот круто выглядящее приложение датчика, цифровой компас MEMS, сделанное с помощью Processing IDE. Вы можете найти более подробную информацию и исходный код этого примера по следующей ссылке:

Производственный процесс
- Что такое магнитометр?
- Что мне делать с данными ?!
- Игра с гироскопом Arduino с MPU-6050
- Удовольствие от гироскопа с кольцом NeoPixel
- Мониторинг CO2 с помощью датчика K30
- Слепоглухое общение с 1Sheeld / Arduino
- Управление монетоприемником с помощью Arduino
- Arduino с Bluetooth для управления светодиодом!
- Емкостной датчик отпечатков пальцев с Arduino или ESP8266
- Игра с дисплеем Nextion