


Динамический веб-контроль Arduino
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Об этом проекте
Введение
Если вы новичок, рекомендую прочитать про Arduino - Servo Motor и Arduino - Wifi.
Чтобы подключить Arduino к Интернету, нам нужно использовать какой-то интернет-экран, такой как экран Ethernet, экран Wi-Fi, экран PHPoC или экран PHPoC Wifi.
Отличительной особенностью PHPoC Shield является то, что он не только обеспечивает подключение к Интернету, такое как Ethernet и Wifi Shield, но также предоставляет веб-сервер, который позволяет контролировать и контролировать Arduino из веб-браузера. Он также поддерживает WebSocket, поэтому мы можем контролировать и отслеживать Arduino в режиме реального времени без перезагрузки веб-страницы.
PHPoC Shield имеет несколько встроенных веб-приложений. Для получения более подробной информации перейдите по этой ссылке.
В этом проекте я изменил пользовательский интерфейс (пользовательский интерфейс) веб-удаленного управления / слайда . веб-приложение и написал код Arduino для поворота серводвигателя в соответствии с углом, полученным из веб-браузера.
Электропроводка
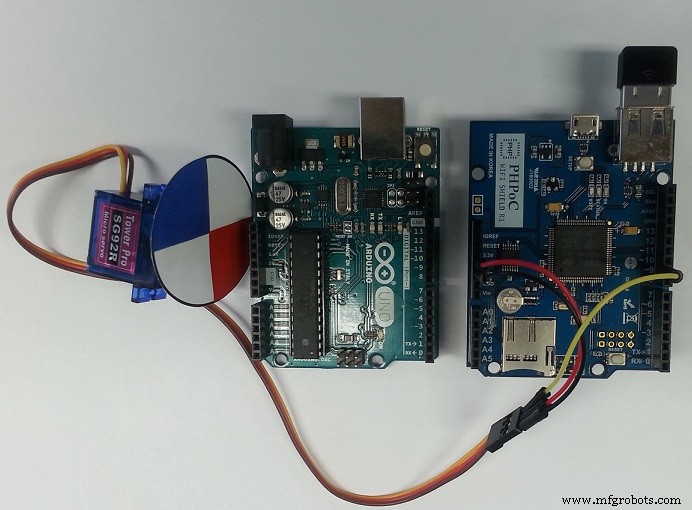
- Стек PHPoC Shield на Arduino
- Подключите контакты GND, VCC и сигнал серводвигателя к GND, 5V и контакту 9 Arduino соответственно.
Поток данных
Веб-браузер ---> PHPoC Shield ---> Arduino
Веб-приложение рассчитает угол на основе события касания или мыши и отправит его на экран PHPoC через веб-сокет. Получая эти данные, щит PHPoC передает их Arduino. Arduino вращает серводвигатель в соответствии с углом.
Что нам нужно делать
- Установить информацию о Wi-Fi для экрана PHPoC (SSID и пароль)
- Загрузить новый интерфейс на PHPoC Shield
- Напишите код Arduino
Настройка информации о Wi-Fi для PHPoC Shield
См. Эту инструкцию:http://www.phpoc.com/support/manual/p4s-347_user_manual/contents.php?id=network_first_setup
Загрузите новый интерфейс в PHPoC Shield
- Загрузите исходный код PHPoC remote_rotate.php (в разделе кода)
- Загрузите его на экран PHPoC Shield с помощью отладчика PHPoC в соответствии с этой инструкцией.
Написать код Arduino
- Установите библиотеку для Arduino в Arduino IDE (см. инструкцию) и перезапустите Arduino IDE.
- В среде Arduino IDE перейдите в Файл -> Примеры -> Phpoc -> WebRemoteSlide и Файл -> Примеры -> Серво-> развертка.
- Объедините два примера в один, у нас есть код для управления серводвигателем через веб-страницу (см. исходный код в разделе кода).
Тестирование
- Нажмите кнопку последовательного порта в Arduino IDE, чтобы увидеть IP-адрес.
- Откройте веб-браузер и введите http:// replace_ip_address . /remote_rotate.php
- Нажмите кнопку подключения и проверьте его.
Лучший стартовый комплект Arduino для начинающих
Если вы ищете комплект Arduino, см. «Лучший комплект Arduino для начинающих»
Ссылки на функции
- Arduino - серво-библиотека
- Servo.attach ()
- Servo.write ()
- Servo.writeMicroseconds ()
- Servo.read ()
- Servo.attached ()
- Servo.detach ()
- Serial.begin ()
- Serial.println ()
- delay ()
- цикл для
- цикл while
- если еще
- цикл ()
- setup ()
- String.toInt ()
Код
- remote_rotate.php
- Код Arduino
remote_rotate.php PHP
PHPoC Shield - веб-удаленное управление для Arduino
Веб-удаленное управление / поворот
WebSocket: null
Угол: 0
Код Arduino Arduino
/ * веб-сервер arduino - удаленное управление (ползунковый переключатель) * / # include "SPI.h" #include "Phpoc.h" #includeСервер PhpocServer (80); Servo myservo; // создание сервообъекта для управления сервоприводом slideName; int slideValue; void setup () {Serial.begin (9600); в то время как (! серийный); Phpoc.begin (PF_LOG_SPI | PF_LOG_NET); //Phpoc.begin (); server.beginWebSocket ("удаленный_ слайд"); Serial.print ("Адрес сервера WebSocket:"); Serial.println (Phpoc.localIP ()); myservo.attach (9); // подключает сервопривод на выводе 9 к сервообъекту myservo.write (1); } void loop () {// ждем нового клиента:PhpocClient client =server.available (); если (клиент) {String slideStr =client.readLine (); если (строка слайда) {значение слайда =строка слайда (1) .toInt (); myservo.write (слайд-значение); Serial.print ("Угол:"); Serial.println (слайд-значение); }}}
Производственный процесс
- Веб-контроллер DMX
- Arduino Spybot
- Управление монетоприемником с помощью Arduino
- Управление бытовой техникой через Интернет или мобильное устройство
- Центр управления Arduino
- Arduino с Bluetooth для управления светодиодом!
- Управление увлажнителем Arduino
- Arduino Nano:управление двумя шаговыми двигателями с помощью джойстика
- Arduino - отправка температуры в Интернет через последовательный
- Arduino - разблокировка веб-шаблона