


Выбор длины волны в системах LiDAR
Существуют разные типы LiDAR. Те, кто работает в автомобильной промышленности, должны знать об относительных сильных и слабых сторонах каждого из них.
Широко признано, что передовые системы помощи водителю (ADAS) и автономное вождение (AD) могут быть успешными при эффективном обнаружении окружающей среды, окружающей автомобиль, с помощью алгоритмов, обеспечивающих автономную навигацию. Учитывая абсолютную зависимость от зондирования в критических для жизни ситуациях, используются несколько модальностей датчиков, при этом данные объединяются, чтобы дополнять друг друга и обеспечивать избыточность. Это позволяет каждой технологии раскрыть свои сильные стороны и предоставить лучшее комбинированное решение.
Три модальности, которые будут важны для датчиков, используемых в транспортных средствах для ADAS и AD в будущем, - это датчики изображения, радар и LiDAR (обнаружение света и дальность). У каждого из этих датчиков есть свои сильные стороны, и вместе они могут составлять полный набор датчиков, доставляющих данные, чтобы позволить алгоритмам автономного восприятия принимать решения с помощью объединения датчиков - способности обеспечивать цвет, интенсивность, скорость и глубину для каждой точки или ядра в сцена.
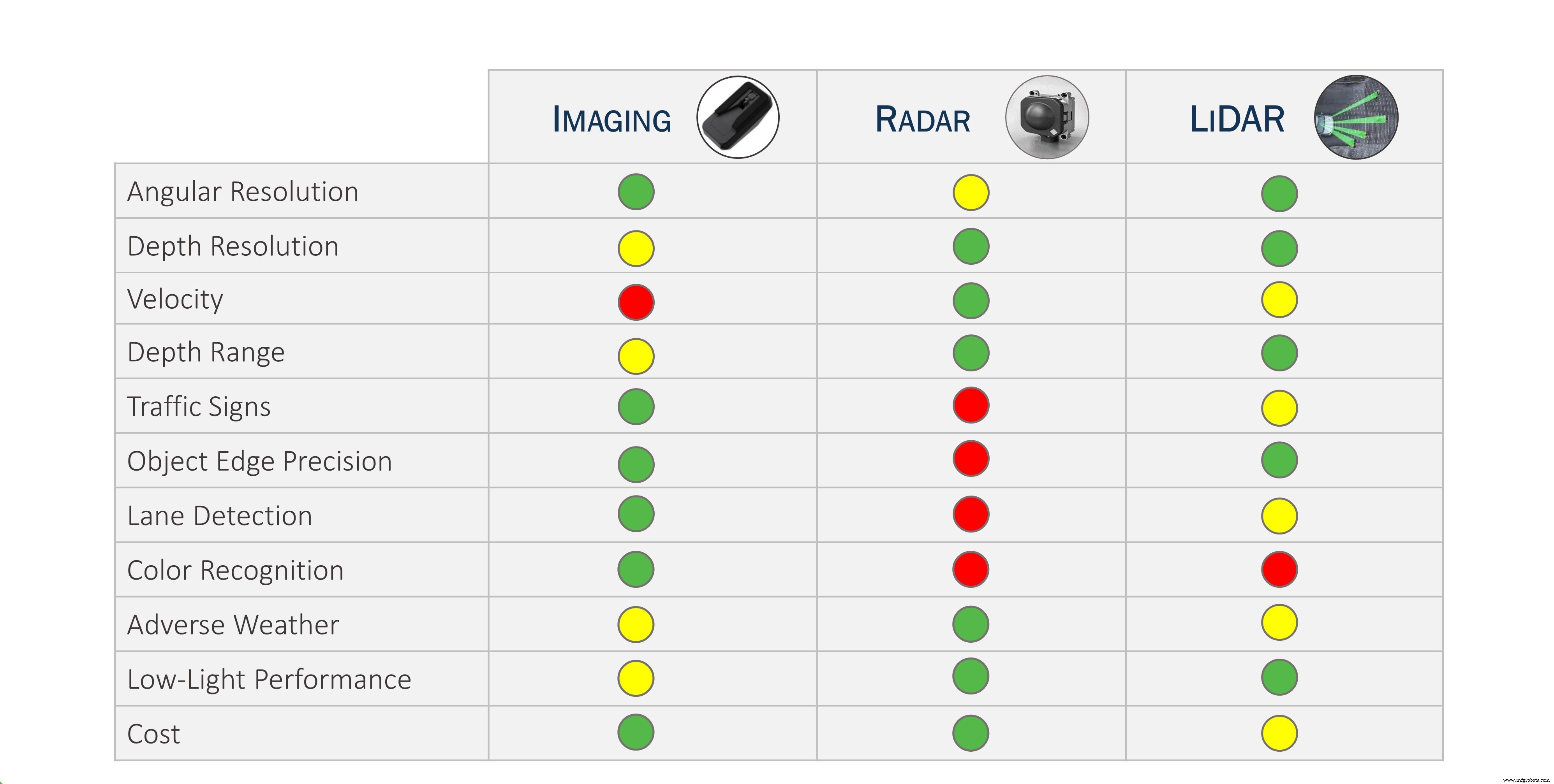
Рис. 1. Объединение датчиков использует преимущества каждой из модальностей для предоставления полной информации об окружающей среде.
Из этих трех основных методов LiDAR является наиболее молодой технологией, которая будет коммерциализирована для использования на массовом рынке, хотя концепция использования света для измерения расстояния восходит к десятилетиям. По данным Yole Développement, рынок автомобильного LiDAR должен продемонстрировать впечатляющий рост с 39 миллионов долларов в 2020 году до прогнозируемых 1,75 миллиарда долларов в 2025 году, обусловленный распространением автономных систем, требующих полного набора датчиков. Возможности настолько велики, что над технологией LiDAR работают более 100 компаний, а к 2020 году совокупные инвестиции в эти компании превысят 1,5 миллиарда долларов - и это было до большого количества первичных публичных размещений, инициированных SPAC, более чем горсткой компаний. Компании-лидары, которые начали свою деятельность в конце 2020 года. Но когда так много компаний работают над одной технологией - некоторые из которых принципиально различаются, например, длина волны используемого света (выдающиеся примеры - 905 нм и 1550 нм) - неизбежно быть выигрышной технологией и консолидацией, как это было неоднократно видно снова и снова, будь то Ethernet для сетей или VHS для видео.
Когда кто-то смотрит на пользователей технологии LiDAR - производителей автомобилей, а также на компании, которые проектируют и создают автономные роботизированные транспортные средства для перевозки людей и товаров, - самое важное, что они думают, - это их требования. В конечном итоге эти компании хотят, чтобы поставщики предоставляли им LiDAR-датчики, которые являются недорогими с высокой степенью надежности, но при этом соответствуют характеристикам дальности и обнаружения объектов с низкой отражательной способностью. Хотя все инженеры имеют твердую точку зрения, эти компании, вероятно, будут безразличны к внедрению технологии, если поставщик сможет удовлетворить требования к производительности и надежности по разумной цене. И это приводит к фундаментальным дебатам, которые эта статья призвана помочь решить:какая длина волны будет преобладать для автомобильных LiDAR-приложений?
Обзор LiDAR
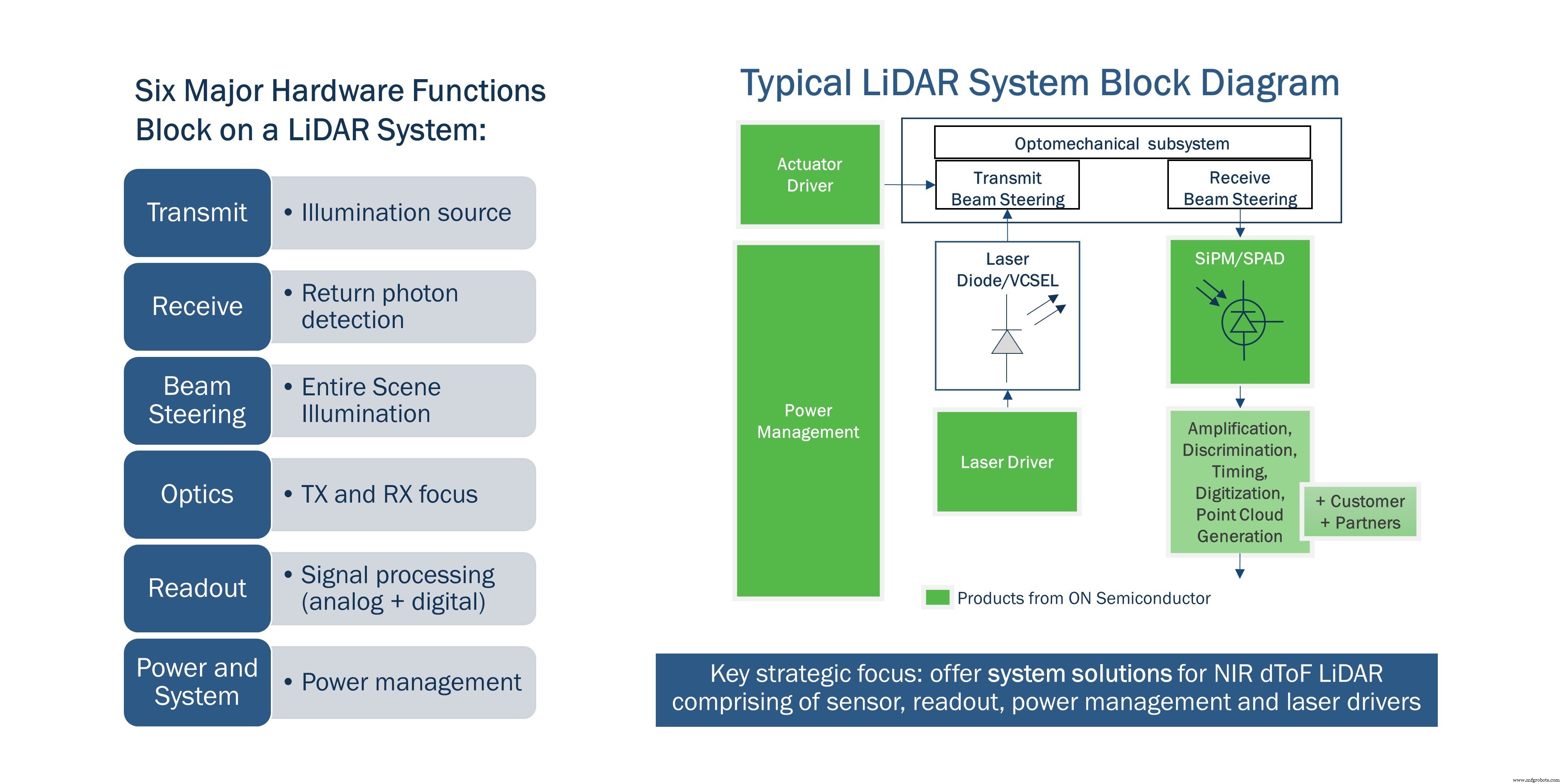
Чтобы ответить на этот вопрос, необходимо понять анатомию системы LiDAR, у которой есть разные архитектуры. Когерентный LiDAR, тип которого называется частотно-модулированной непрерывной волной (FMCW), смешивает переданный лазерный сигнал с отраженным светом для вычисления дальности и скорости объектов. FMCW предлагает некоторые преимущества, но он остается относительно необычным по сравнению с наиболее распространенным подходом LiDAR - LiDAR с прямым измерением времени пролета (dToF). Эта реализация измеряет расстояние до объекта, рассчитывая, сколько времени требуется, чтобы очень короткий импульс света, посланный от источника освещения, отражался от объекта и возвращался для обнаружения датчиком. Он использует скорость света для прямого рассчитайте расстояние до объекта, используя простую математическую формулу, связывающую время, скорость и расстояние. Типичная система dToF LiDAR имеет шесть основных аппаратных функций, хотя выбор длины волны в основном влияет на функции передачи и приема.
щелкните, чтобы увидеть полноразмерное изображение
В таблице 1 приведен список различных производителей LiDAR, начиная от известных автомобильных Tier-1 и заканчивая стартапами во всех регионах мира. Согласно рыночным отчетам и общедоступной информации, подавляющее большинство этих компаний используют свои LiDAR в ближнем инфракрасном (NIR) диапазоне длин волн, в отличие от коротковолнового инфракрасного (SWIR). Кроме того, в то время как поставщики, ориентированные на SWIR и работающие над FMCW, ограничены этими длинами волн, большинство из тех, у кого есть прямая реализация времени пролета, имеют возможность создать систему с длинами волн ближнего ИК-диапазона, если они захотят, имея при этом возможность использовать многие из их существующих IP связаны с такими функциями, как управление лучом и обработка сигналов.
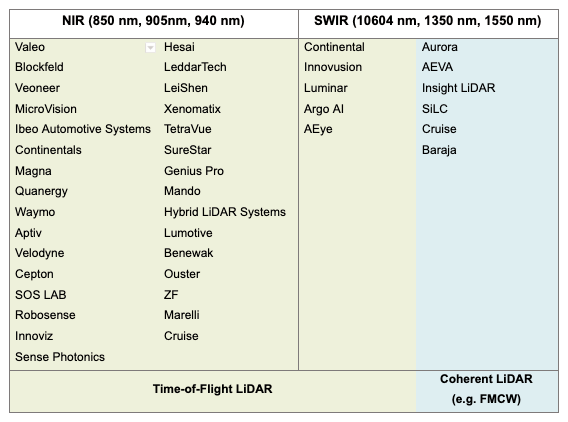
Таблица 1:Список производителей LiDAR, которые работают с длинами волн ближнего и дальнего света. Не полный список. (Источник изображения:Yole, IHS Markit и публичное раскрытие информации)
Учитывая, что большинство, но не все, из этих производителей выбрали длины волн ближнего ИК-диапазона, следует учитывать, как они пришли к такому решению и каковы его последствия. В основе обсуждения лежит некоторая базовая физика, связанная со свойствами легких и полупроводниковых материалов, из которых состоят компоненты, используемые в LiDAR.
Фотоны, испускаемые лазером в системе LiDAR, которые должны отражаться от объектов и приниматься детектором, должны конкурировать с фотонами окружающей среды, исходящими от Солнца. Глядя на спектр солнечного излучения и принимая во внимание поглощение в атмосфере, можно увидеть «провалы» в освещенности на определенных длинах волн, которые уменьшили бы количество фотонов, существующих в качестве шума для системы. На длине волны 905 нм количество солнечного излучения примерно в 3 раза выше, чем на длине волны 1550 нм, а это означает, что система ближнего ИК-диапазона должна иметь дело с большим шумом, который может мешать работе датчика. Но это лишь один из факторов, который следует учитывать при выборе длины волны для системы LiDAR.
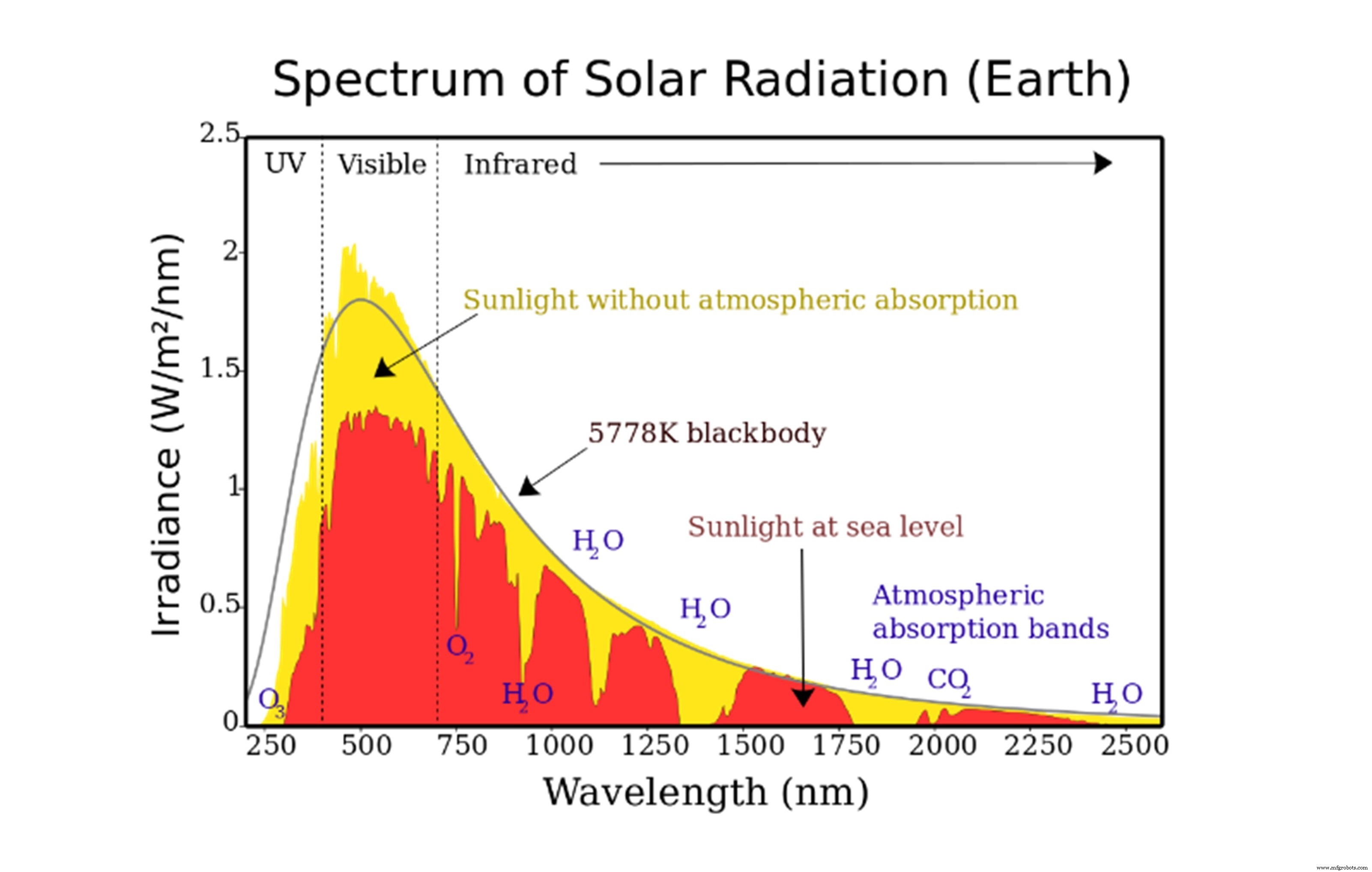
Рис. 3. Поглощение света атмосферой дает четкие пики.
Датчики
Компоненты, отвечающие за обнаружение фотонов в системе LiDAR, представляют собой фотодетекторы разных типов, поэтому важно объяснить, почему они могут состоять из разных полупроводниковых материалов в зависимости от длины волны, которую нужно обнаруживать. В полупроводнике запрещенная зона разделяет валентную зону и зону проводимости. Фотоны обеспечивают энергию, чтобы помочь электронам преодолеть эту запрещенную зону и сделать полупроводник проводящим, создавая тем самым фототок. Энергия каждого фотона связана с его длиной волны, а ширина запрещенной зоны полупроводника связана с его чувствительностью - вот почему необходимы разные полупроводниковые материалы в зависимости от длины волны света, который должен быть обнаружен. Кремний, который является наиболее распространенным и дешевым полупроводником в производстве, чувствителен к длинам волн видимого и ближнего ИК диапазона до примерно 1000 нм. Для обнаружения длин волн, выходящих за пределы диапазона SWIR, можно сплавить более экзотические полупроводники группы III / V, чтобы сделать такие материалы, как InGaAs, способными обнаруживать эти длины волн света от 1000 до 2500 нм.
Ранние LiDAR использовали фотодиоды с PIN-кодом в качестве датчиков. PIN-фотодиоды не имеют собственного усиления и, как следствие, не могут легко обнаруживать слабые сигналы. Лавинные фотодиоды (ЛФД) являются наиболее популярным типом датчиков, используемых сегодня в LiDAR, и обеспечивают умеренное усиление. Тем не менее, APD также должны работать в линейном режиме, как фотодиоды с PIN-кодом, чтобы интегрировать сигнал от прихода фотонов, а также страдают от плохой однородности по частям, требуя при этом очень высоких напряжений смещения. Новейшие типы датчиков, которые все чаще используются в LiDAR, построены на однофотонных лавинных диодах (SPAD), которые имеют очень большое усиление и способны выдавать измеримый выходной ток от каждого отдельного обнаруженного фотона. Кремниевые фотоумножители (SiPM) представляют собой массивы SPAD на основе кремния, которые обладают дополнительным преимуществом, заключающимся в том, что они могут отличать одиночные фотоны от множественных фотонов по амплитуде генерируемого сигнала.
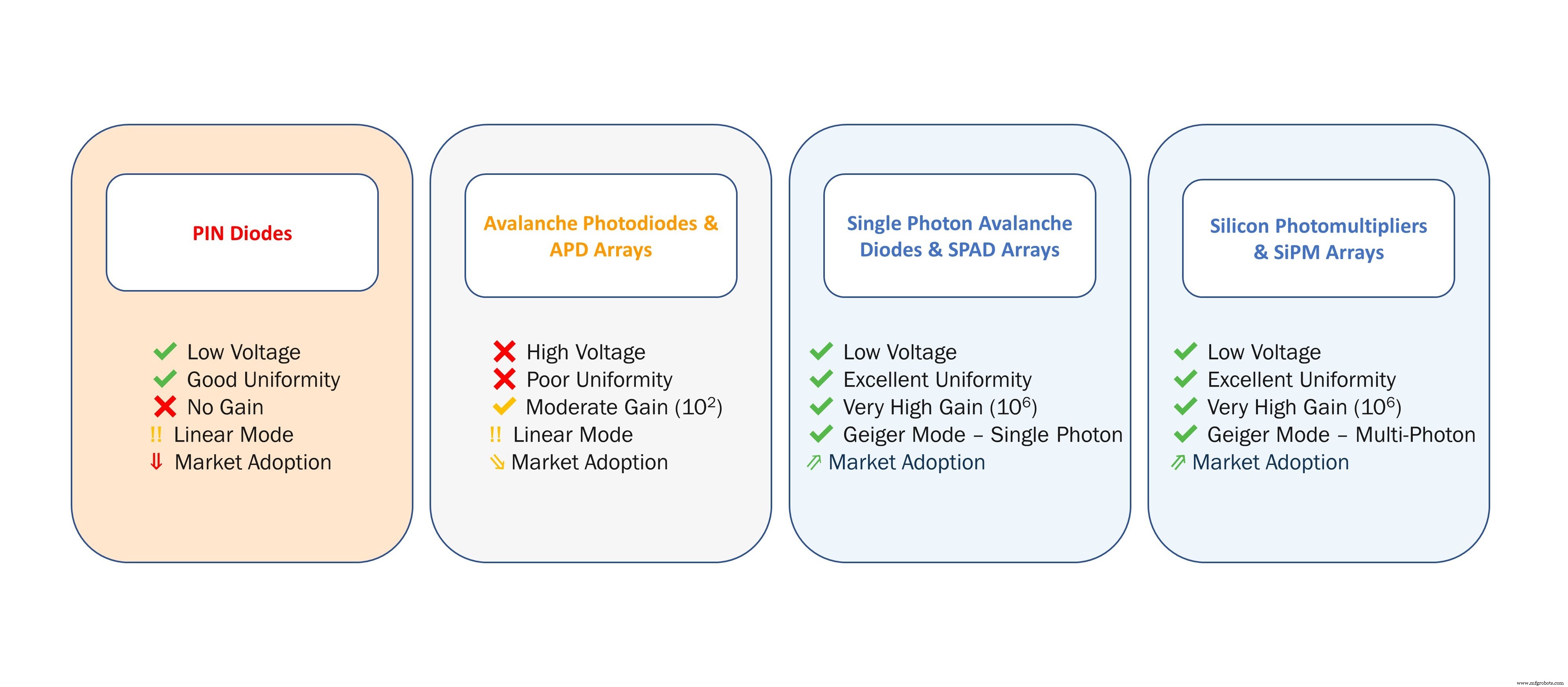
Рис. 4. Различные типы фотодетекторов, используемые для обнаружения сигналов в LiDAR
Возвращаясь к теме длин волн, все эти типы фотодетекторов могут быть построены на кремнии (для обнаружения в ближнем инфракрасном диапазоне) или на полупроводниках III / V (для обнаружения в ближнем инфракрасном диапазоне). С другой стороны, технологичность и стоимость являются ключевыми факторами жизнеспособности технологии, а литейные производства кремния CMOS позволяют производить такие датчики в больших объемах и с низкими затратами. Это основная причина, по которой SiPM все чаще используются для LiDAR, помимо обеспечения более высокой производительности. Хотя APD и SPAD для SWIR существуют, их сложно интегрировать с логикой считывания из-за того, что процессы не основаны на кремнии. Наконец, массивы SPAD на основе III / V и фотоумножители (аналогичные SiPM) для SWIR еще не коммерциализированы, поэтому доступность экосистемы благоприятствует длинам волн NIR.
Лазеры
Генерация фотонов - это совершенно другой процесс. Полупроводниковый p-n-переход в качестве усиливающей среды может быть использован для создания лазера; это делается путем прокачки тока через переход, вызывая резонансное излучение фотонов, когда атомы переходят в более низкие энергетические диапазоны, что приводит к когерентному выходу лазерного луча. Полупроводниковые лазеры основаны на материалах с прямой запрещенной зоной, таких как GaAs и InP, которые эффективны для генерации фотонов, которые происходят, когда атомы переходят в более низкую энергетическую зону, в отличие от материалов с непрямой запрещенной зоной, таких как кремний.
В LiDAR используются два основных типа лазеров:лазер с торцевым излучением (EEL) и лазер с поверхностным излучением с вертикальным резонатором (VCSEL). EEL сегодня более широко используются из-за их более низкой стоимости и более высокой выходной эффективности, чем VCSEL. Их сложнее упаковать и встроить в массивы, а также они страдают от сдвига длины волны в зависимости от температуры, из-за чего детекторам приходится искать более широкую полосу длин волн фотонов, что позволяет обнаруживать больше фотонов окружающей среды в качестве шума. Несмотря на более высокую стоимость и более низкую энергоэффективность, новая технология VCSEL имеет преимущество, заключающееся в простой и эффективной упаковке, поскольку луч генерируется сверху. Принятие VCSEL на рынке растет, поскольку его стоимость продолжит значительно снижаться, а энергоэффективность повысится. EEL и VCSEL существуют для генерации длин волн как в ближнем инфракрасном, так и в ближнем инфракрасном диапазоне, с одним ключевым отличием - длины волн ближнего инфракрасного диапазона могут быть созданы с помощью GaAs, в то время как длины волн SWIR требуют использования InGaAsP. В лазерах на GaAs можно использовать литейные цеха больших размеров, что приводит к снижению затрат, что снова указывает на преимущество для экосистемы производителей NIR-LiDAR как с точки зрения затрат, так и с точки зрения безопасности цепочки поставок.
щелкните, чтобы увидеть полноразмерное изображение
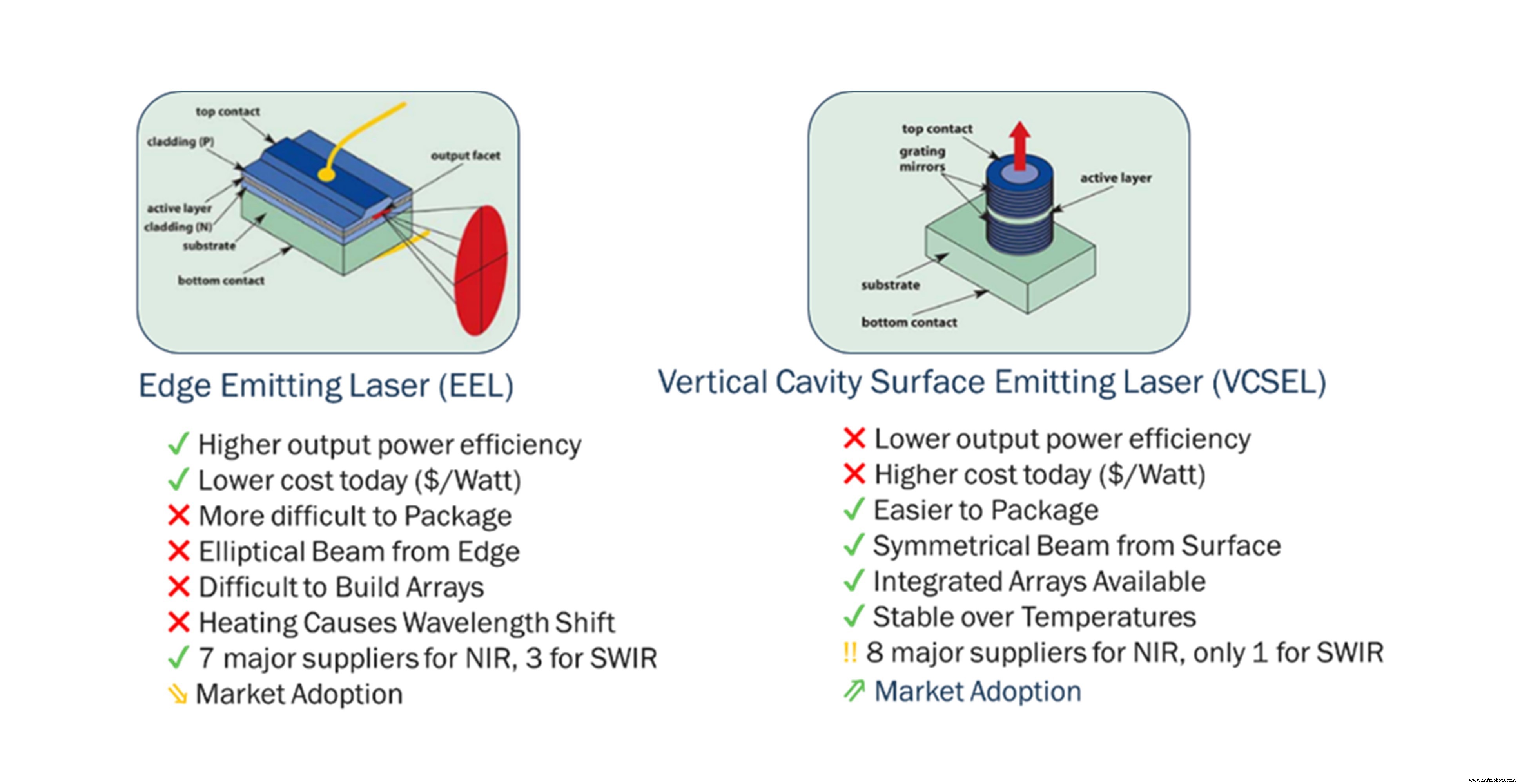
Рис. 5. Различные типы лазеров, используемые в LiDAR.
Мощность лазера и безопасность глаз
Говоря о дебатах о длине волны, необходимо обязательно учитывать последствия использования системы LiDAR для безопасности глаз. Концепция dToF LiDAR включает использование коротких лазерных импульсов с высокой пиковой мощностью при определенном угле обзора, которые излучаются на сцену. Пешеход, стоящий на пути излучения LiDAR'а, должен быть уверен, что его глаза не будут повреждены лазером, направленным в его сторону, а IEC-60825 - это спецификация, которая определяет, насколько максимально допустимое воздействие находится на разных участках. длины волн света. В то время как ближний инфракрасный свет, подобный видимому свету, может проходить через роговицу и достигать сетчатки человеческого глаза, свет SWIR в основном поглощается внутри роговицы и, как результат, может подвергаться воздействию на более высоких уровнях.
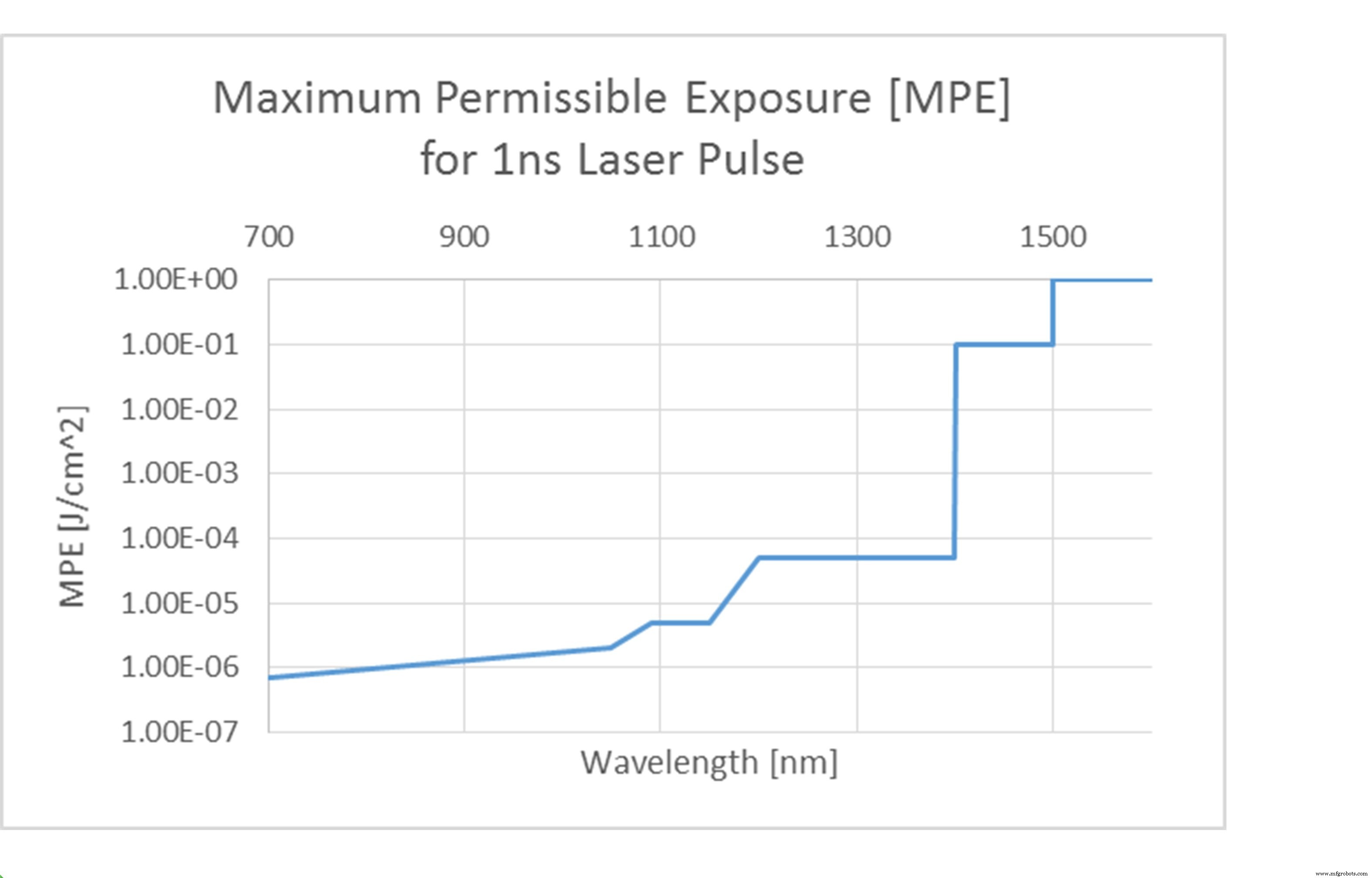
Рис. 6. Спецификация IEC-60825 для безопасного для глаз лазерного воздействия.
Возможность вывода на несколько порядков большей мощности лазера является преимуществом для системы на основе 1550 нм с точки зрения производительности, поскольку она позволяет отправлять больше фотонов и, таким образом, возвращать их для обнаружения. Однако более высокая мощность лазера также требует теплового баланса. Следует отметить, что надлежащий безопасный для глаз дизайн должен быть выполнен независимо от длины волны с четким учетом энергии в импульсе и размера лазерной апертуры. При использовании LiDAR на основе 905 нм пиковая мощность может быть увеличена любым из этих факторов, как показано на рисунке 7.
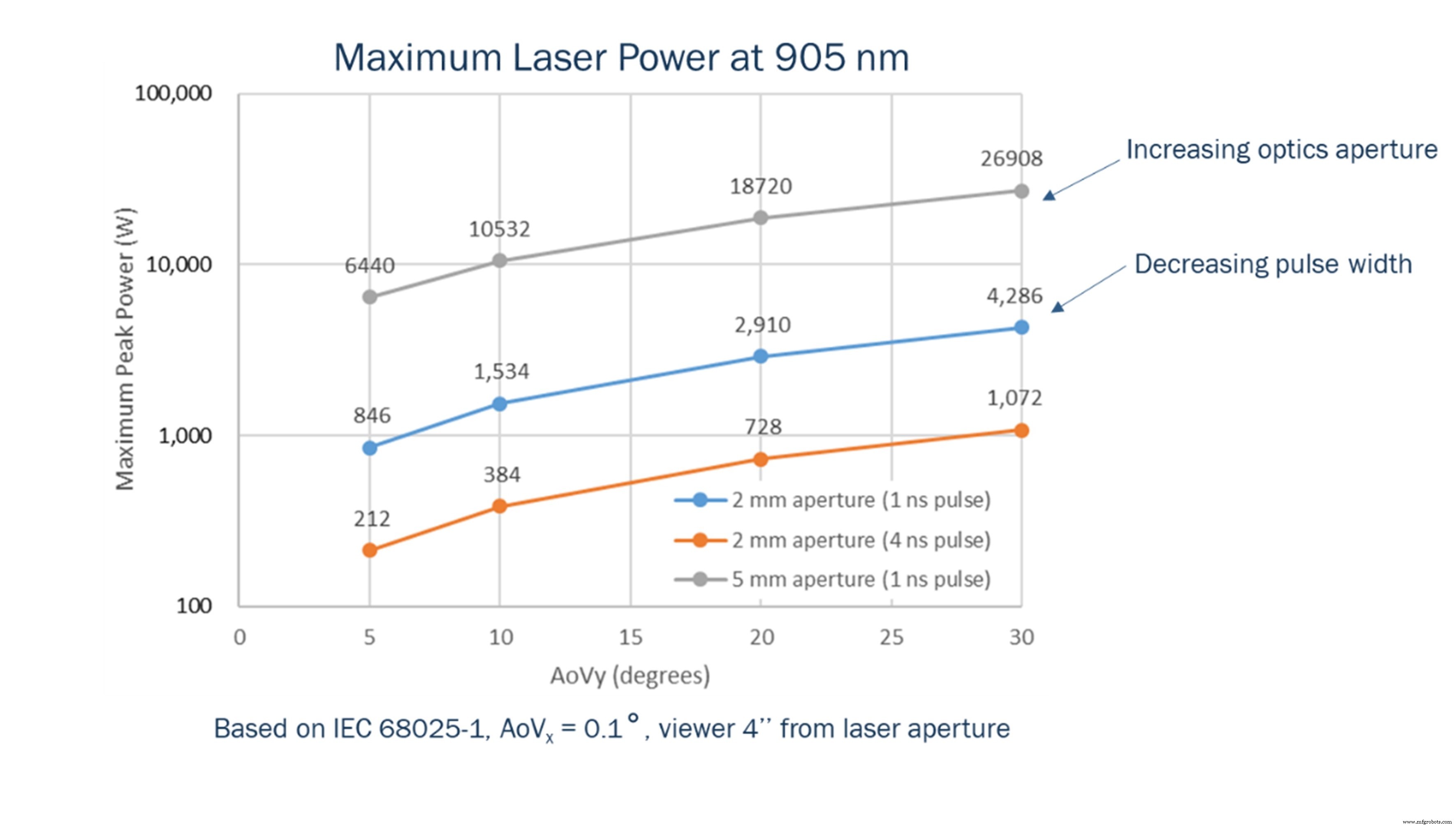
Рис. 7. Безопасная для глаз конструкция лазера для БИК-лидара с различными оптическими и лазерными параметрами.
Сравнение LiDAR-систем NIR и SWIR
Вышеупомянутый акцент на количестве выходной мощности лазера возвращает нас к используемым датчикам. Датчик с более высокими характеристиками, способный обнаруживать более слабые сигналы, несомненно, принесет системе множество преимуществ - в том, что он сможет достичь большей дальности или использовать меньшую мощность лазера для достижения той же дальности. Компания ON Semiconductor разработала серию SiPM для NIR LiDAR, которая повысила эффективность обнаружения фотонов (PDE) - ключевой параметр, указывающий на чувствительность - до 18% с ее новейшими датчиками серии RDM.
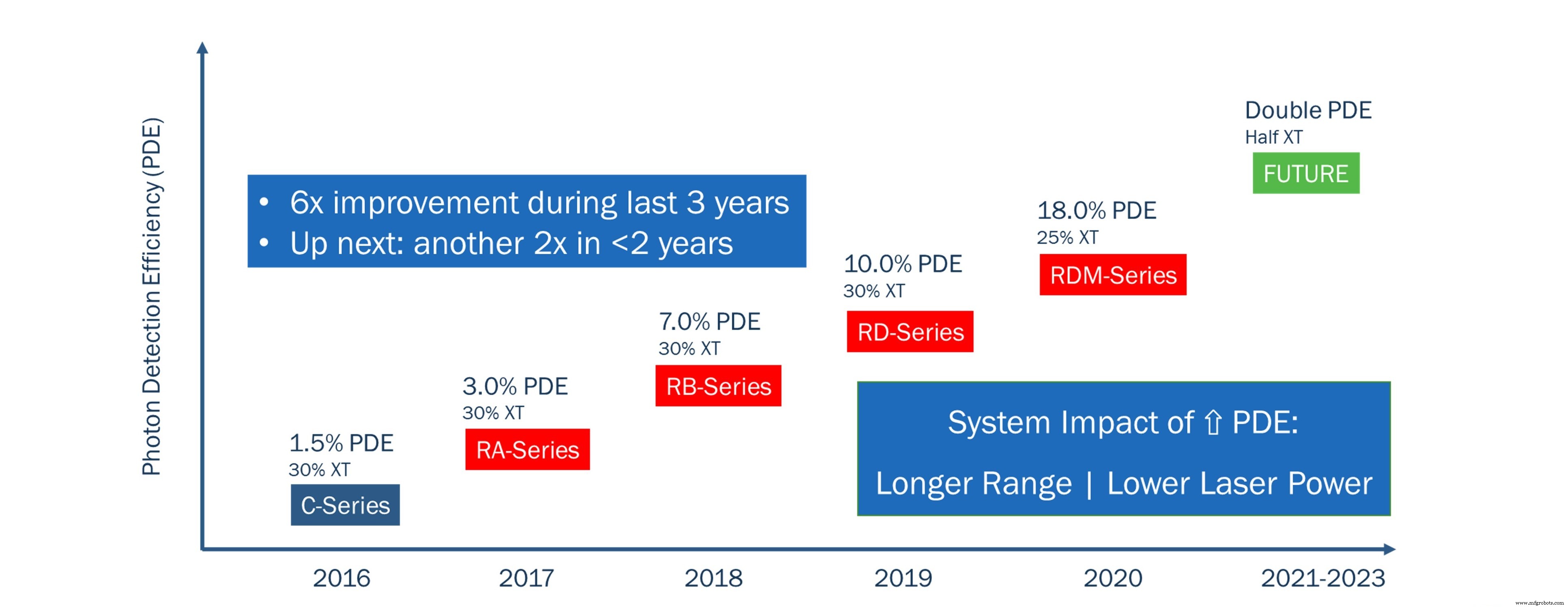
Рис. 8. Схема процесса производства SiPM ON Semiconductor.
Чтобы сравнить характеристики LiDAR dToF в ближнем инфракрасном диапазоне и LiDAR dToF в ближнем инфракрасном диапазоне, мы выполнили моделирование системы для идентичных архитектур LiDAR и условий окружающей среды с различными параметрами для лазеров и датчиков. Архитектура LiDAR представляет собой коаксиальную систему с 16-канальной детекторной решеткой и механизмом сканирования для распределения по полю обзора, как показано на рисунке 10. Эта модель системы была проверена с помощью оборудования и позволяет нам точно оценить производительность LiDAR. системы.
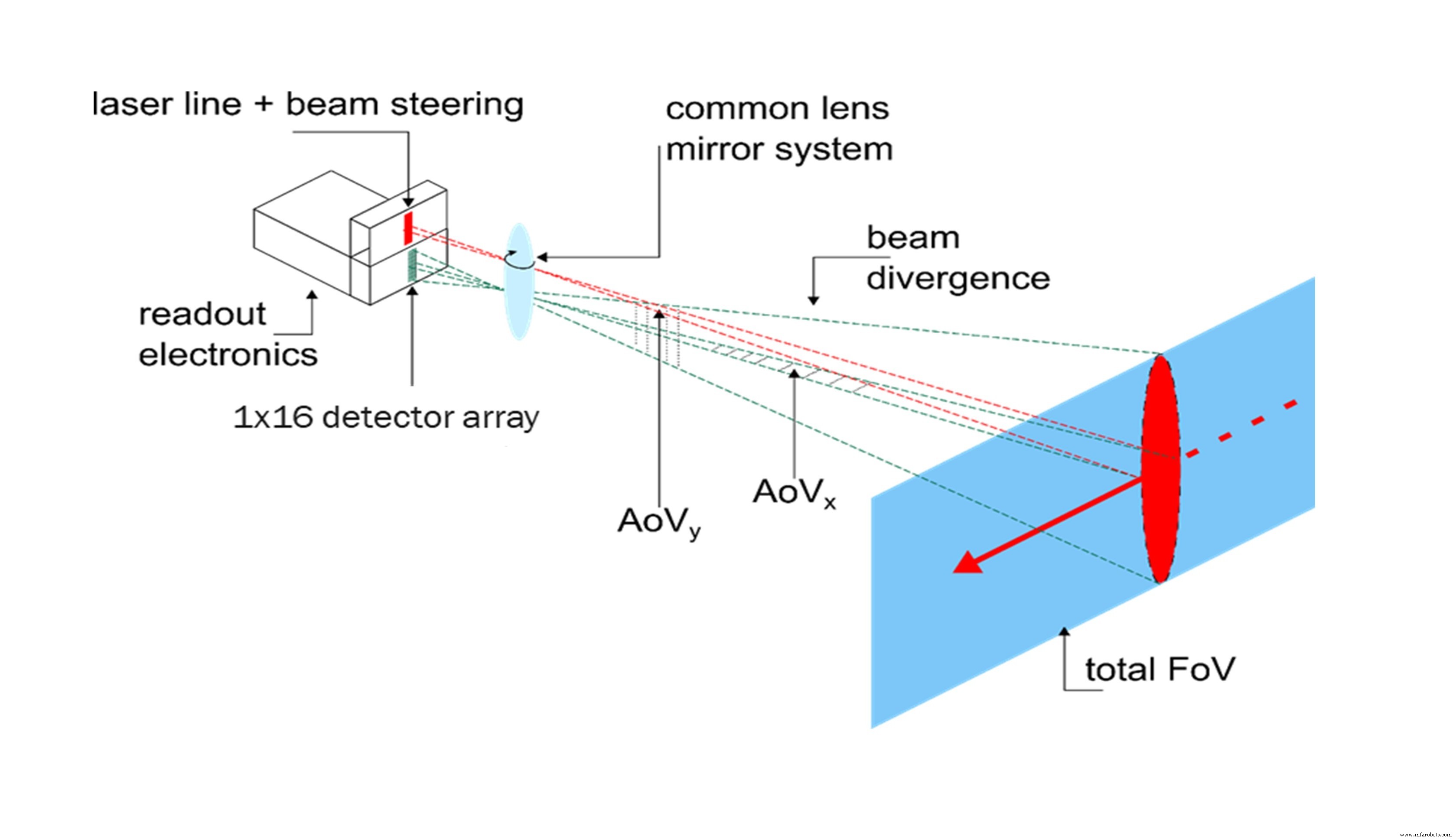
Рис. 9. Модель системы для датчика dToF LiDAR.
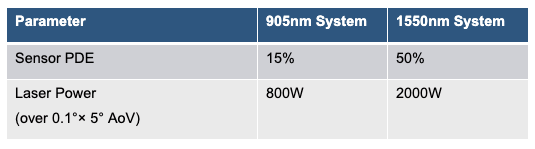
Таблица 2:Параметры датчика LiDAR и лазера для моделирования системы в ближнем и ближнем инфракрасном диапазоне.
В системе 1550 нм используется более высокая мощность лазера, а также более высокий датчик PDE из-за использования сплавов InGaAs с высоким содержанием PDE, что должно обеспечить лучшие характеристики при моделировании нашей системы. Используя параметры системного уровня 100 люкс окружающего света, отфильтрованного полосой пропускания 50 нм на линзе датчика (с центром около 905 нм и 1550 нм соответственно), угол обзора 0,1 ° x 5 °, сканирование более 80 ° по горизонтали со скоростью 30 кадров в секунду, частота повторения лазера 500 кГц с При ширине импульса 1 нс и диаметре линзы 22 мм результаты показаны на рисунке 10.
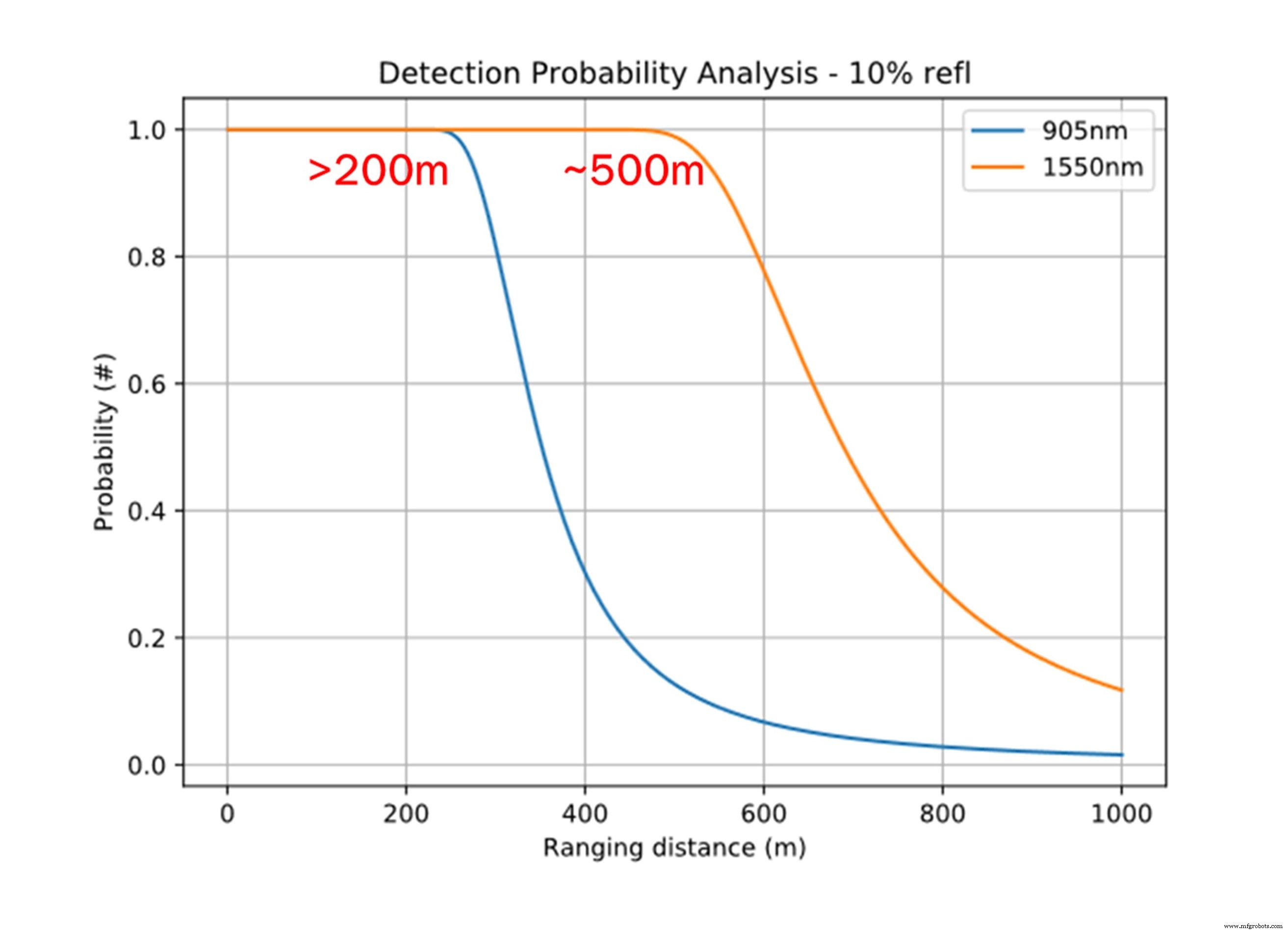
Рис. 10. Результаты моделирования для аналогичных систем LiDAR на основе 905 нм и 1550 нм.
Как и ожидалось, система на 1550 нм способна увеличивать дальность действия для объекта с низкой отражательной способностью, достигая 500 м с вероятностью дальности 99%. Тем не менее, система на основе 905 нм по-прежнему обеспечивает дальность более 200 м, показывая, что оба типа систем могут соответствовать требованиям автомобильного LiDAR дальнего действия в типичных условиях окружающей среды. Когда возникают неблагоприятные условия окружающей среды, такие как дождь или туман, водопоглощающие свойства света SWIR приводят к более быстрому ухудшению его характеристик, чем у систем на основе NIR, что является еще одним фактором, который следует учитывать.
Соображения по стоимости
Подробно изучив технологию, лежащую в основе систем LiDAR, а также последствия использования различных длин волн, мы теперь вернемся к фактору соображений стоимости. Ранее мы объясняли, что датчики, используемые для LiDAR на основе ближнего ИК-диапазона, производятся в процессе производства кремния на основе КМОП-матрицы, что обеспечивает минимально возможную стоимость полупроводников. Кроме того, они также позволяют интегрировать логику считывания CMOS с датчиком в одну микросхему за счет использования технологии многослойных кристаллов, которая сегодня легко доступна на литейных заводах, что еще больше сокращает сигнальную цепочку и снижает стоимость. И наоборот, датчики SWIR используют заводы по производству полупроводников III / V, такие как InGaAs, которые являются более дорогими, и новую гибридную технологию Ge-Si, которая может позволить использовать более дешевые датчики SWIR, что упрощает интеграцию с логикой считывания, но, по оценкам, более чем в 5 раз дороже. чем традиционный кремний CMOS даже после достижения зрелости. Что касается лазера, разница в размерах пластин GaAs, используемых для изготовления лазерных чипов в системах ближнего инфракрасного диапазона, и пластин InGaAs, используемых для изготовления лазерных чипов в системах SWIR, снова приводит к диспропорции в стоимости и тому факту, что системы ближнего инфракрасного диапазона имеют путь к использованию VCSEL с гораздо более доступной базой поставщиков также обеспечивает более дешевую интеграцию.
Сумма вышеуказанных факторов привела к анализу, проведенному IHS Markit (Amsrud, 2019), который показал, что для того же типа компонента (датчик или лазер) стоимость системы SWIR будет в 10-100 раз выше. чем система NIR. Средняя комбинированная стоимость компонентов датчика и лазера для системы NIR оценивалась в размере от 4 до 20 долларов США на канал в 2019 году и снизилась до 2-10 долларов США к 2025 году. Напротив, эквивалентная средняя стоимость компонентов для системы SWIR была оценена как составит 275 долларов за канал в 2019 году и снизится до 155 долларов за канал к 2025 году. Это огромная разница в стоимости, если учесть тот факт, что системы LiDAR содержат несколько каналов, даже при использовании подхода 1D-сканирования, поскольку вертикальный массив одноточечных каналов все еще остается требуется.
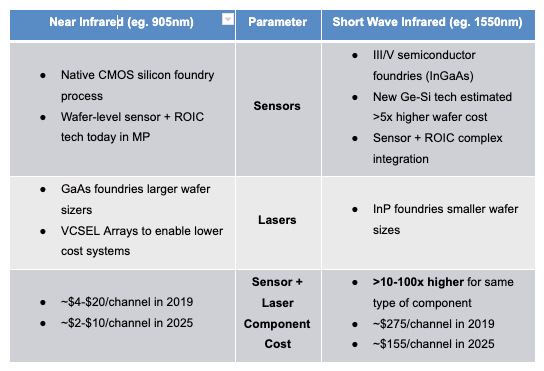
Таблица 3. Сводная информация о стоимости. (Источник изображения:IHS Markit)
Динамика рынка LiDAR также не в пользу лагеря SWIR. Рынок автономного вождения не вырос так быстро, как ожидалось пять лет назад, а системы автономии уровня 4 и уровня 5, для которых LiDAR является обязательным требованием, еще не готовы к широкому массовому внедрению. Между тем, рынки промышленности и робототехники, использующие LiDAR, еще более экономичны и не нуждаются в сверхвысокопроизводительных преимуществах системы SWIR, поэтому у этих производителей пока нет возможности предлагать компоненты. затраты снижаются за счет увеличения объема, как часто утверждают. Существует проблема «курица и яйцо», заключающаяся в снижении затрат при увеличении объема, но при необходимости более низких затрат для получения объемов.
Резюме
После глубокого погружения в технологию и различия между системами NIR и SWIR становится ясно, почему подавляющее большинство существующих сегодня систем LiDAR используют длины волн NIR. Хотя перспективы на будущее никогда не могут быть на 100% определенными, очевидно, что стоимость и доступность поставщиков экосистемы являются ключевыми факторами, и системы на основе NIR, безусловно, всегда будут дешевле из-за технологических преимуществ и экономии на масштабе для кремния CMOS. И хотя SWIR позволяет использовать систему LiDAR с большим радиусом действия, LiDAR на основе ближнего инфракрасного диапазона также может удовлетворить желаемые автомобильные требования к дальнему радиусу действия, а также чрезвычайно хорошо работать для конфигураций с малым и средним радиусом действия, что также необходимо в ADAS и AD. Существование LiDAR на основе ближнего ИК-диапазона в массовом производстве для автомобильного рынка сегодня показывает, что технология была коммерциализирована и проверена, но для консолидации и ухода победителей и проигравших потребуется время. В конце концов, автомобильная промышленность на рубеже 20-го века насчитывала 30 различных производителей, а за следующие десять лет их число увеличилось почти до 500 - но прошло всего несколько лет, чтобы большинство из них исчезло. Ожидается, что к концу этого десятилетия аналогичная динамика может произойти и с производителями LiDAR.
Ссылки
Yole Développement (2020). LiDAR для автомобильных и промышленных приложений - Отчет о рынке и технологиях 2020
Амсруд П. (25 сентября 2019 г.). Гонка за недорогую систему LIDAR [Презентация на конференции] . Automotive LIDAR 2019, Детройт, Мичиган, США. IHS Markit.
- Бахман Хаджи, директор по развитию бизнеса подразделения автомобильных датчиков, ON Semiconductor
>> Эта статья изначально была опубликована на нашем дочернем сайте EE Times.
Связанное содержание:
- Эксперты ADAS думают об интеграции датчиков в автомобили будущего
- Умные города:лидары в интеллектуальных транспортных системах
- Что движет изменениями в системах автомобильной электроники
- Технология времени пролета обещает повышенную точность.
- Почему технология FIR-зондирования необходима для создания полностью автономных транспортных средств.
Чтобы получить больше информации о Embedded, подпишитесь на еженедельную рассылку Embedded по электронной почте.
Датчик
- Датчик Холла нацелен на важные с точки зрения безопасности автомобильные системы
- Разработка систем интеллектуального земледелия с открытым исходным кодом
- Понимание датчиков
- Бимодальная «электронная кожа»
- Время полета по сравнению с системами FMCW LiDAR
- Сенсорная пленка для аэрокосмической отрасли
- Миниатюрный датчик «легкое-сердце» на чипе
- Твердотельный датчик углекислого газа
- Датчик качества воздуха на основе углерода
- Технология автономных датчиков для обратной связи в режиме реального времени об охлаждении и обогреве