


Сравнение схем автоадресации доступа к автомобилю
Системы доступа к автомобилям, использующие Bluetooth Low Energy, обычно имеют центральный модуль и несколько вспомогательных модулей / узлов, которые обмениваются данными через шину сети контроллера (CAN) или шины локальной межсетевой связи (LIN). Спутниковые модули физически распределены по автомобилю для увеличения дальности связи Bluetooth.
Разработчики системы хотели бы улучшить технологичность изготовления спутникового модуля, спроектировав одну печатную плату с идентичным программным обеспечением, чтобы установка в автомобиле не зависела от положения узла Bluetooth. Однако, поскольку аппаратное и программное обеспечение каждого сателлитного узла во время установки идентично, необходима схема, позволяющая центральному модулю назначать уникальный адрес CAN или LIN каждому сателлитному узлу после того, как модули будут установлены в транспортном средстве.
Один из вариантов - использовать выделенную гирляндную сеть LIN для передачи идентификаторов CAN модулям во время производства. В этом сценарии центральный модуль использует интерфейс LIN для адресации каждого вспомогательного модуля, но интерфейс LIN больше не будет использоваться в течение всего срока службы автомобиля. В другом варианте выделенная шина LIN заменяется дискретной реализацией, что снижает затраты на спецификацию. Чтобы еще больше сократить системные затраты, настоящий беспроводной вариант, использующий только Bluetooth и не требующий дополнительного оборудования, перепрофилирует инфраструктуру Bluetooth, уже доступную на узлах, для адресации модулей.
В конечном счете, беспроводной метод сокращает количество материалов, монтажных соединений системы, а также затраты на хранение, управление и сборку ненужных компонентов. В этой статье представлен обзор проводных методов автоадресации перед более глубоким изучением беспроводного метода.
В автомобильных системах доступа к автомобилям наблюдается тенденция к использованию Bluetooth с низким энергопотреблением для использования телефона в качестве ключа или других возможностей цифрового ключа. Эти системы работают аналогично системам пассивного пуска с пассивным входом, но добавляют возможность использовать смартфон водителя в качестве ключа, заменяя традиционные брелки для ключей. В автомобилях с функцией телефона как ключа имеется центральный модуль или модуль смарт-ключа, а также несколько спутниковых модулей, каждый из которых может принимать сигнал Bluetooth от смартфона или брелока. Типичная система может иметь от шести до 12 спутниковых модулей в дополнение к центральному модулю (рис. 1).
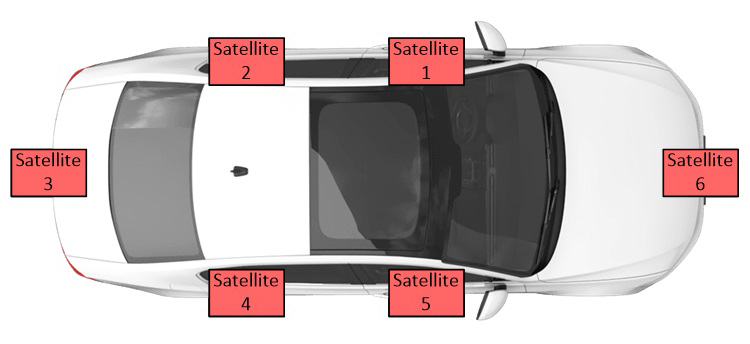
Рис. 1. На этой схеме показано, где в автомобиле можно разместить спутниковые модули Bluetooth.
Потребителям нужна система «телефон как ключ», чтобы иметь возможность определять, когда телефон или брелок находится в зоне отпирания автомобиля. Чтобы приблизительно определить местонахождение смартфона или брелока, система триангулирует сигналы, принимаемые различными спутниковыми модулями, которые распределяются по всему автомобилю в таких местах, как дверь со стороны пассажира, качающаяся панель, багажник или бамперы.
Центральный модуль автомобиля связывается со спутниковыми модулями с помощью интерфейса связи, такого как шина CAN или шина LIN. Центральный модуль использует данные, полученные от каждого спутникового модуля, для триангуляции местоположения смартфона или брелока, а затем определяет, разрешить ли въезд в автомобиль. На рисунке 2 показано, как шину CAN можно использовать в качестве основной сети связи между центральным и вспомогательными модулями.
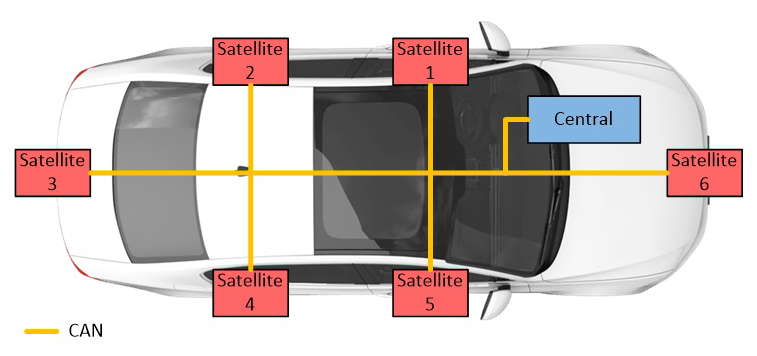
Рис. 2. CAN-шина может рассматриваться как основная сеть связи между центральным и спутниковым модулями в сети автомобильной системы доступа Bluetooth.
Адрес шины CAN спутниковых модулей позволяет центральному модулю определять, от какого спутникового модуля он принимает данные. Центральный модуль связывает уникальный идентификатор CAN или адрес с местоположением каждого конкретного вспомогательного модуля, определяемого общей конструкцией системы. Вместо того, чтобы иметь уникальную печатную плату для каждого вспомогательного модуля с жестко закрепленным или жестко запрограммированным адресом шины, было бы выгодно иметь единую конструкцию печатной платы с единой версией микропрограммного обеспечения для всех вспомогательных модулей. Это позволяет избежать дополнительных затрат и проблем с логистикой, связанных с производством и управлением запасами шести, восьми или более почти идентичных единиц. Единая конструкция также упрощает производство, позволяя устанавливать один и тот же спутниковый модуль в любом месте автомобиля.
Поскольку аппаратное и программное обеспечение вспомогательных узлов идентично и не адресуется во время установки, требуется схема, которая позволяет центральному модулю назначать уникальный идентификатор CAN или адрес каждому вспомогательному модулю после установки в автомобиле.
Проводная автоадресация:метод последовательного подключения LIN
В настоящее время назначение адресов CAN-шины спутниковым модулям в автомобилях осуществляется с помощью отдельной сети связи (такой как LIN) со спутниками, подключенными к шине гирляндой (рисунок 3). Центральный модуль отправляет сетевой адрес шины CAN первому вспомогательному узлу по шине LIN. После завершения первый сателлитный узел отправит следующий адрес, полученный от центрального модуля, на второй спутник, используя шину LIN. Этот процесс продолжается до тех пор, пока все спутники не получат свои уникальные CAN-адреса.
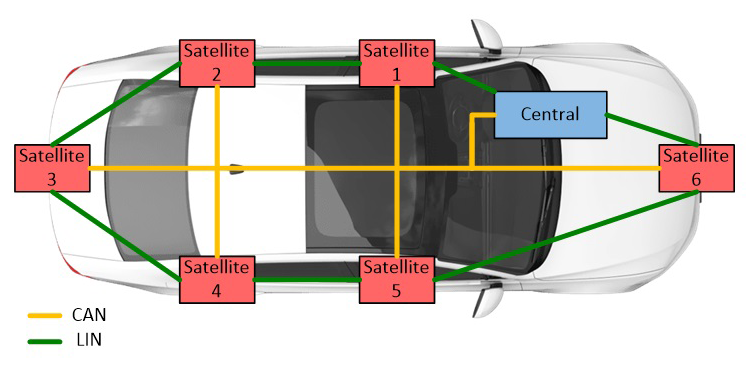
Рис. 3. Эта архитектура автоадресации использует шлейфовое соединение LIN для отправки уникальных идентификаторов CAN на спутники.
Эта схема требует двух физических уровней LIN (PHY) на модуль, один для приема данных, а другой для передачи данных. Физические уровни LIN используются только во время операции автоадресации. После программирования спутников вся стандартная передача данных осуществляется через шину CAN доступа к автомобилю. Типичный автомобиль может иметь от шести до 12 спутниковых модулей, что означает, что ему потребуется от 14 до 26 LIN PHY для поддержки одноразовой операции автоадресации, что значительно увеличивает спецификацию печатной платы автомобиля, стоимость системы и сложность.
Проводная автоадресация:однопроводный метод
Компания Texas Instruments разработала альтернативный метод снижения стоимости спецификации каждого модуля путем замены выделенных LIN PHY с автоматической адресацией на полевой МОП-транзистор и несколько резисторов. Основное отличие программного обеспечения автоматической адресации этой схемы заключается в том, что все спутниковые модули запрограммированы для системы микросхемы Bluetooth (SoC), чтобы игнорировать шину CAN до тех пор, пока не будет получен сигнал пробуждения на линии P_IN. На рисунке 4 показана блок-схема.
щелкните, чтобы увеличить изображение
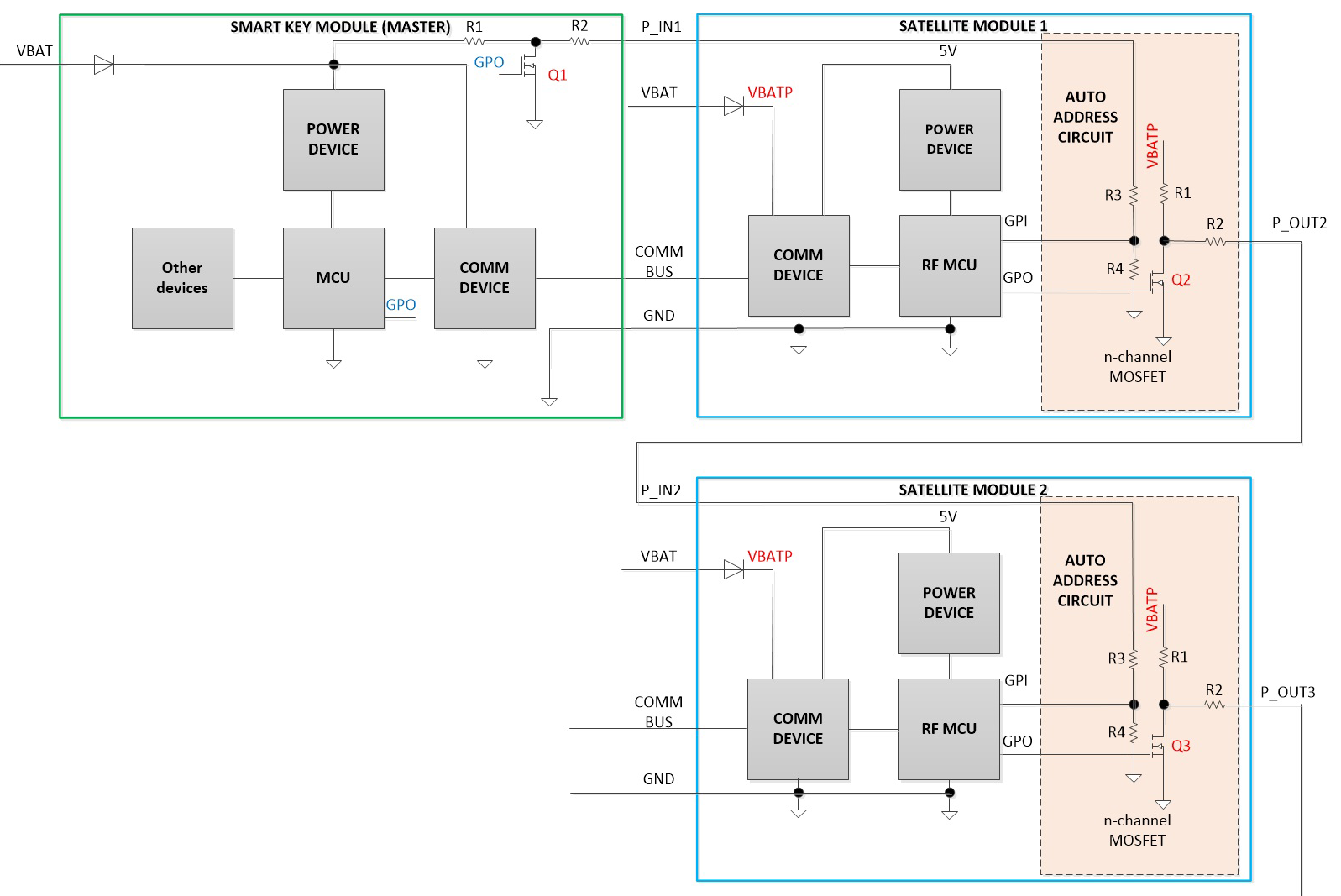 Рис. 4. Однопроводной метод автоадресации заменяет LIN PHY на полевой МОП-транзистор и несколько резисторов.
Рис. 4. Однопроводной метод автоадресации заменяет LIN PHY на полевой МОП-транзистор и несколько резисторов.
Центральный модуль инициирует процесс автоадресации, посылая сигнал широтно-импульсной модуляции (ШИМ) по линии P_IN1 с помощью полевого транзистора Q1. Через делитель напряжения первый спутниковый модуль принимает сигнал пробуждения уровня заряда батареи, P_IN1, сигнализирующий микроконтроллеру Bluetooth «прослушать» шину CAN. Параллельно с этим центральный модуль начинает непрерывную передачу CAN ID первого спутникового модуля по шине CAN. Как только первый спутниковый модуль получает сообщение CAN ID, он отправляет сообщение подтверждения обратно в центральный модуль, чтобы подтвердить надлежащий прием адреса. После отправки сообщения подтверждения первый спутниковый модуль отправляет сигнал пробуждения ШИМ второму спутниковому модулю, сигнализируя этому модулю начать прослушивание шины CAN и получить свой новый идентификатор CAN. После того, как центральный модуль получит сообщение подтверждения от первого спутникового модуля, шина CAN будет постоянно передавать сообщение CAN ID второго спутникового модуля, пока он не получит сообщение подтверждения от второго спутникового модуля.
Таким образом, каждый сателлитный модуль один за другим выводит из спящего режима следующий для получения идентификатора CAN ID от шины CAN. Центральный модуль увеличивает следующий CAN ID, передаваемый после получения сообщения подтверждения от адресуемого спутникового модуля, до тех пор, пока все модули не будут адресованы *.
Несмотря на то, что это улучшение, эта реализация по-прежнему требует проводки между центральным модулем и каждым из вспомогательных модулей, как показано на рисунке 5.
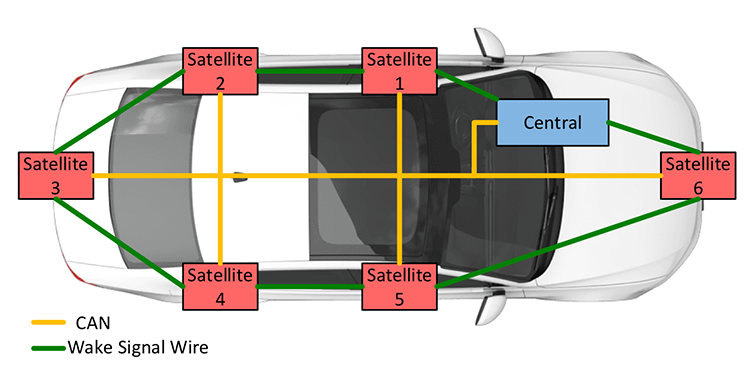
Рис. 5. Однопроводная архитектура автоадресации по-прежнему требует подключения между центральным и вспомогательным модулями.
Автоадресация беспроводной сети / замена кабеля
Компания Texas Instruments также разработала метод автоадресации, использующий методы локализации Bluetooth. Эти методы позволяют назначать спутниковым модулям Bluetooth адрес CAN от центрального модуля во время производства и после замены модуля. Процесс адресации модуля начинается с того, что модуль определен как ближайший к центральному модулю, и продолжается в порядке от ближайшего к самому дальнему, пока не будет адресован самый дальний модуль. Фактическое местоположение не требуется, поскольку расположение модулей, метод измерения и окружение модуля будут определять измеренное расстояние. Расстояние dn представляет собой измеренное расстояние (по индикатору уровня принимаемого сигнала Bluetooth [RSSI]), в идеале:
d1
Например, на рисунке 6 показана блок-схема и расстояние между каждым модулем и центральным модулем.
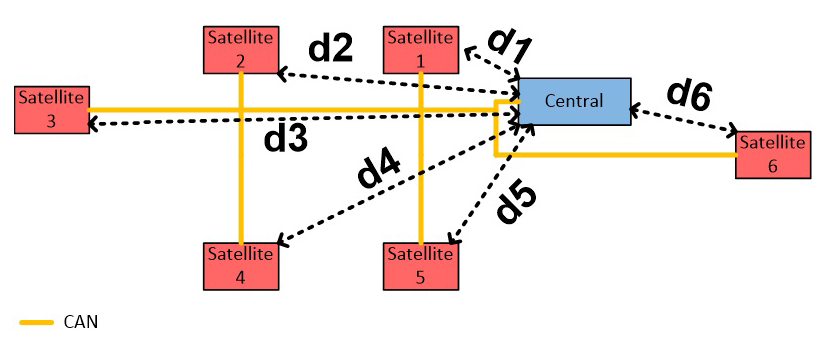
Рисунок 6. На этой диаграмме показаны расстояния между каждым модулем в методе беспроводной автоадресации и центральным модулем.
На практике фактическое расстояние может отличаться от измеренного из-за характеристик распространения радиочастот (RF) в пространстве между конкретным спутником и центральным модулем. Но до тех пор, пока измеренное расстояние от каждого спутникового модуля постоянно согласовано и нет перекрытия между измеренными расстояниями от нескольких модулей, центральный модуль может правильно адресовать их, не зная их точного местоположения вокруг транспортного средства, потому что измеренные расстояния всегда будут в том же порядке от самого короткого до самого дальнего. Таким образом, центральный модуль будет знать из предварительного тестирования, что первый модуль всегда является дверью со стороны водителя (адрес CAN 1), второй модуль всегда является передним бампером (адрес CAN 2) и так далее.
Чтобы гарантировать надежную работу схемы автоадресации, необходимо провести тщательное тестирование, чтобы понять характеристики каждой модели транспортного средства, что позволит выявить и решить любые потенциальные проблемы. Например, если измерения расстояния центрального модуля между двумя или более безадресными спутниковыми модулями одинаковы или равны, ранее адресованный спутниковый модуль можно использовать для локализации тех безадресных модулей, которые не были различимы центральным, как показано на рисунке 7. Это может можно также сделать с использованием нескольких спутниковых модулей.
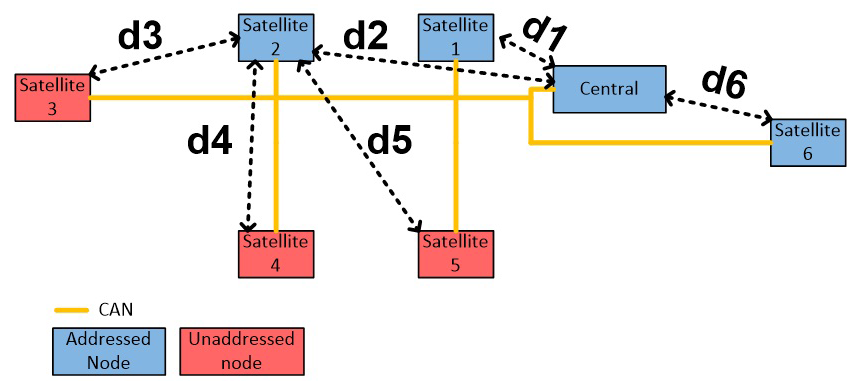
Рис. 7. Сателлитный модуль с ранее полученным адресом может использоваться для локализации безадресных модулей, которые не были различимы мастером.
Когда центральный модуль может локализовать спутники 1, 2 и 6, но не 3, 4 и 5, спутниковый модуль 2 затем используется для измерения расстояний для спутниковых модулей 3, 4 и 5. Опять же, пока измерения расстояний согласованы, и между модулями нет перекрытия в измерениях расстояний, спутниковые модули можно адресовать правильно, и они всегда будут адресованы в одном и том же порядке.
Реализация
Чтобы соответствовать уровню общего профиля доступа (GAP) протокола Bluetooth с низким энергопотреблением, мы будем называть центральный модуль «сканером», а вспомогательные модули - «рекламодателями». Уровень GAP обрабатывает режимы и процедуры доступа устройства, включая обнаружение устройства, установление соединения, завершение соединения, запуск функций безопасности и конфигурацию устройства. Два состояния устройства, относящиеся к автоадресации:
- Рекламодатель:устройство рекламируется с конкретными данными, позволяющими любому инициирующему устройству узнать, что это устройство, с которым можно установить соединение (Примечание:это объявление содержит адрес устройства и может содержать некоторые дополнительные данные, такие как имя устройства).
- Сканер:при получении рекламы сканирующее устройство отправляет рекламодателю запрос на сканирование.
Рекламодатель отвечает скан-ответом; этот процесс называется обнаружением устройства. Сканирующее устройство знает о рекламном устройстве и может установить с ним соединение. На рисунке 8 показаны рекламодатели и сканеры ниже.
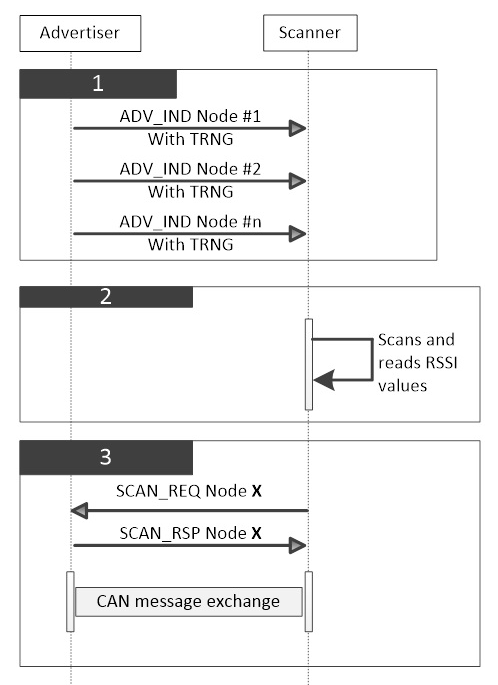
Рис. 8. На этой диаграмме программного обеспечения Bluetooth Low Energy показана последовательность действий рекламодателя и сканера.
Глядя на рисунок 8, все рекламодатели будут рекламировать с конкретными данными, они будут генерировать истинное случайное число, которое будет использоваться как часть их рекламных данных. Это гарантирует отсутствие дублирования узлов.
Сканер будет сканировать несколько раз и считывать значения RSSI от каждого из рекламодателей; затем он будет усреднять значения RSSI, чтобы определить ближайшего к нему рекламодателя.
Сканер отправит запрос на сканирование ближайшему рекламодателю; Затем он передаст автоадресное CAN-сообщение и будет ждать подтверждения CAN-сообщения рекламодателя.
Рекламодатель будет использовать SCAN_REQ для включения автоадреса CAN. Когда рекламодатель получает сообщение CAN с автоматическим адресом, он отправляет сообщение подтверждения CAN и прекращает рекламу.
Эти шаги повторяются до тех пор, пока все рекламодатели не будут автоматически адресованы.
Результаты
Тестирование проводилось с использованием эталонного дизайна спутникового модуля Bluetooth Low Energy + CAN для доступа в автомобиль и 12-футового ремня безопасности. Расстояние между каждым соединителем составляло около 6 футов (рис. 9).
щелкните, чтобы увеличить изображение
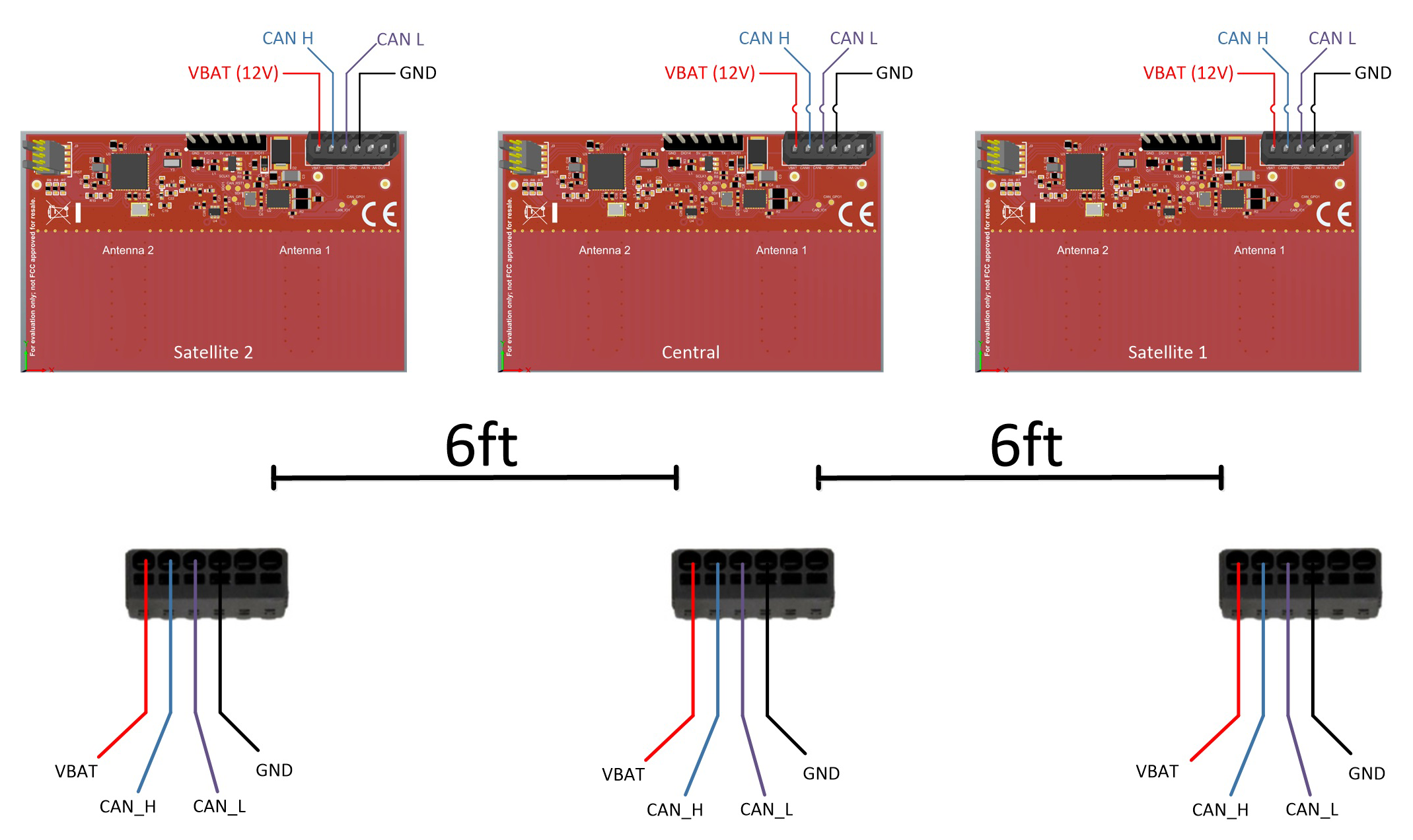
Рис. 9. Аппаратная часть для тестирования включает эталонный дизайн TIDA-020032.
Доски были размещены, как показано на Рисунке 10 (где d1 ~ 4 фута и d2 ~ 8 футов):
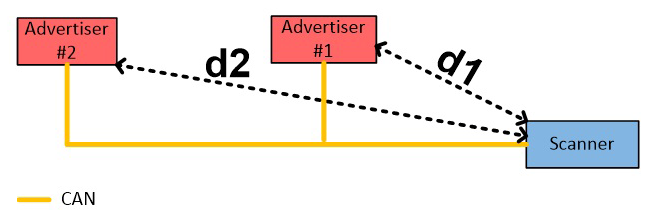
Рисунок 10. На этой схеме показано размещение оборудования для тестирования.
Параметры Bluetooth Low Energy для сканера:продолжительность сканирования 1 с, окно сканирования и интервал 250 мс. Рекламные параметры Bluetooth Low Energy для рекламодателей рекламировались в течение 100-миллисекундного интервала. В течение каждого периода измерения сканер брал 10 выборок RSSI на узел и усреднял каждый набор измерений для получения значения расстояния, измеренного каждым рекламодателем.
Сравнение трех схем автоадресации
Результаты предыдущего теста представлены в таблице 1, в которой сравниваются относительная задержка, надежность и затраты на реализацию каждого из трех методов автоадресации, обсуждаемых в этой статье.
Таблица 1. Сравнение методов автоадресации
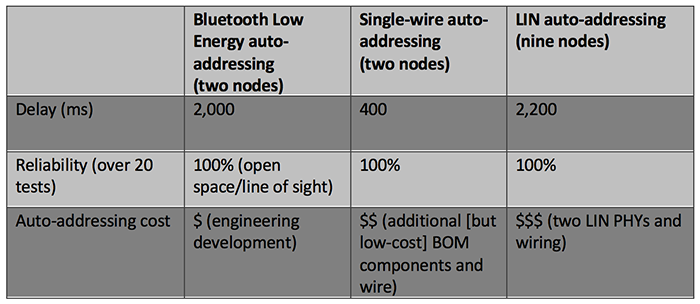
В таблице 1 сравниваются результаты нашего теста беспроводной адресации Bluetooth с низким энергопотреблением с двумя методами проводной автоадресации, описанными ранее. Исходя из этих результатов, похоже, что беспроводной метод занимает примерно в 5 раз больше времени, чем проводной. Лучшего и быстрого отклика можно добиться за счет дальнейшего уточнения параметров сети Bluetooth Low Energy; есть возможности для улучшения. Это потребует дальнейших испытаний, поскольку фактическое расстояние может отличаться от измеренного из-за характеристик распространения радиочастотного излучения, связанных с конкретным местоположением каждого узла в транспортном средстве (т. Е. Проблемы, связанные с отсутствием прямой видимости).
Беспроводная автоадресация - это наиболее экономичное решение с точки зрения материалов, не требующее дополнительного оборудования и дополнительных проводов между модулями. Однако для того, чтобы воспользоваться этими преимуществами, разработчикам системы необходимо будет провести тестирование, чтобы обеспечить производительность РЧ, чтобы оптимизировать программное обеспечение и учесть неточности. Если вы предпочитаете проводной подход, метод проводной автоадресации TI требует добавления в спецификацию нескольких небольших и недорогих компонентов, а также проводов, подключенных между каждым модулем. Вместе они предоставляют набор опций при выборе метода для реализации возможностей автоадресации для автомобильных систем доступа Bluetooth.
* Дополнительные сведения и результаты тестирования однопроводного метода автоадресации см. В справочном руководстве по проектированию спутникового модуля Bluetooth Low Energy + CAN от Texas Instruments.
Ссылки
- Основные характеристики Bluetooth
- Стандарт подключения устанавливает новые стандарты безопасности, Bluetooth SIG.
>> Эта статья была первоначально опубликована на наш дочерний сайт EDN.
Встроенный
- С# конструктор
- Вложенный класс С#
- Перегрузка конструктора C#
- Проектирование с помощью сети Bluetooth:чип или модуль?
- Cervoz:DDR4 очень низкопрофильный SO-DIMM
- Чип со сверхшироким диапазоном частот обеспечивает доступ к автомобилю со смартфона
- Крошечный модуль Bluetooth 5.0 объединяет чип-антенну
- Небольшой модуль ИИ на основе TPU Google Edge
- Интерфейсный модуль упрощает дизайн WI-Fi 6
- ams:модуль ускоряет разработку ультразвуковых счетчиков воды