


Робот-манипулятор Arduino и платформа Mecanum Wheels Автоматическая работа
<основной класс="главный сайт" id="главный">
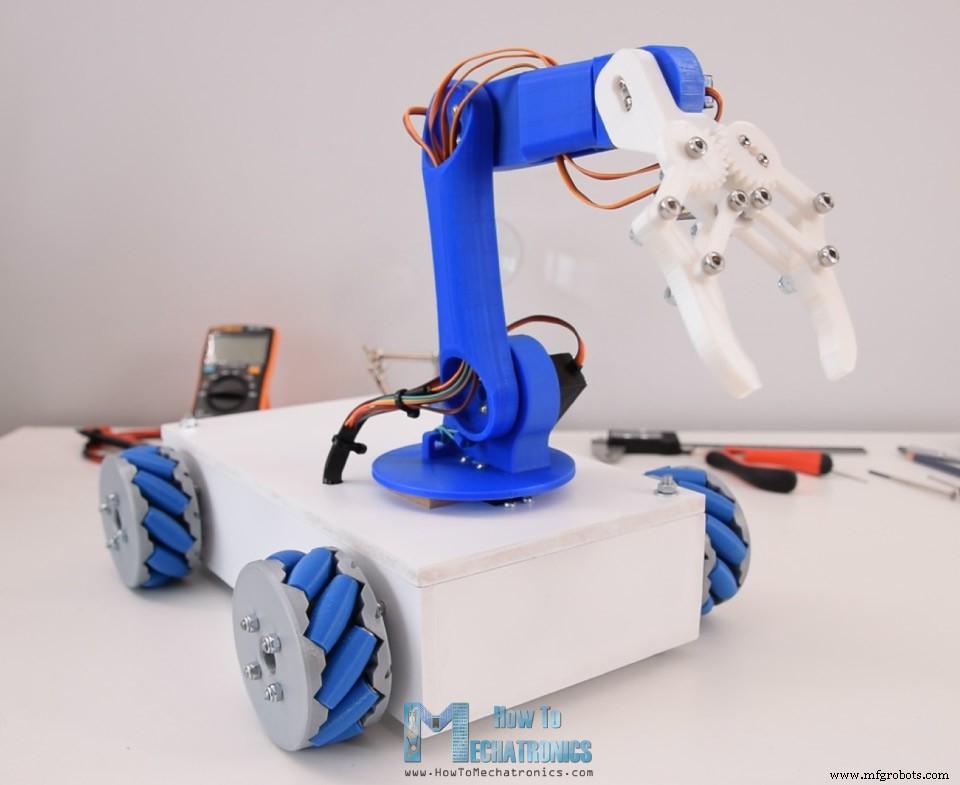
В этом уроке я покажу вам, как я сделал свою роботизированную платформу Mecanum Wheels из моего предыдущего видео, чтобы работать вместе и работать автоматически с моей 3D-печатной роботизированной рукой, также проектом Arduino из одного из моих предыдущих видео.
Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Обзор
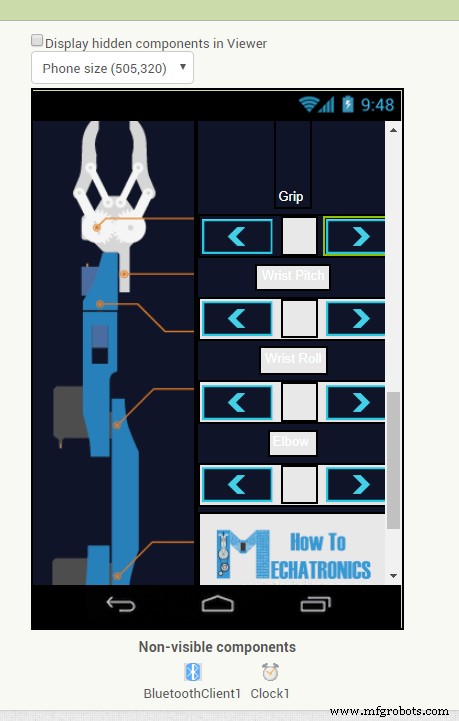
Таким образом, мы можем управлять колесным роботом Mecanum с помощью специального приложения для Android так же, как описано в предыдущем видео. Кроме того, теперь в приложении есть кнопки для управления манипулятором.

Первоначальное приложение для управления рукой робота имело ползунки для управления суставами робота, но это вызывало некоторые проблемы со стабильностью руки. Таким образом, рука работает намного лучше, поэтому я предоставлю эту обновленную версию приложения для управления рукой робота и код Arduino для исходного проекта руки робота.
Тем не менее, самая крутая фишка этого робота — способность запоминать движения, а затем автоматически их повторять.
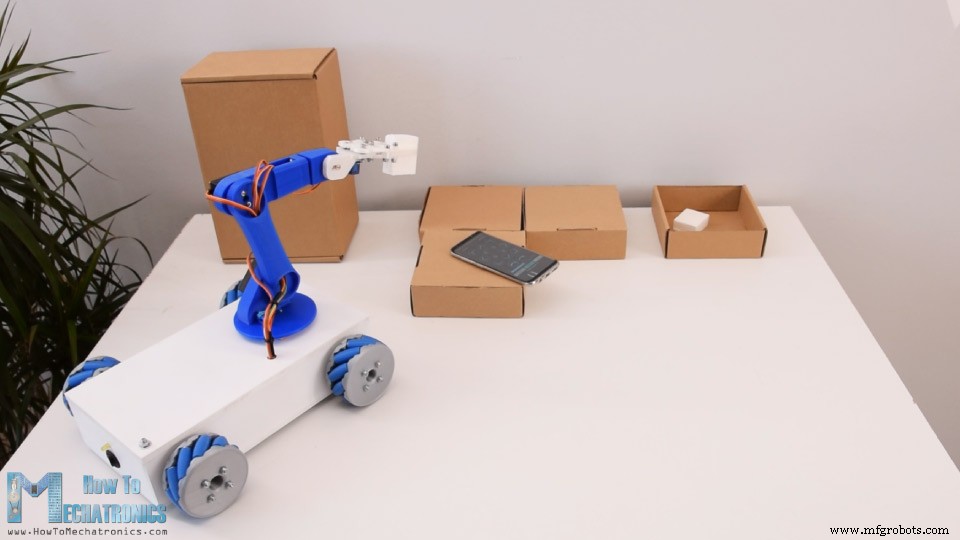
Используя кнопку «Сохранить», мы можем просто сохранить положение двигателей для каждого шага. Затем нам просто нужно нажать кнопку «Выполнить», и робот будет автоматически повторять сохраненные движения снова и снова.
Сборка робота Arduino
Итак, у меня уже собрана платформа колес Mecanum, и вы можете найти все подробности о ней в моем предыдущем видео.
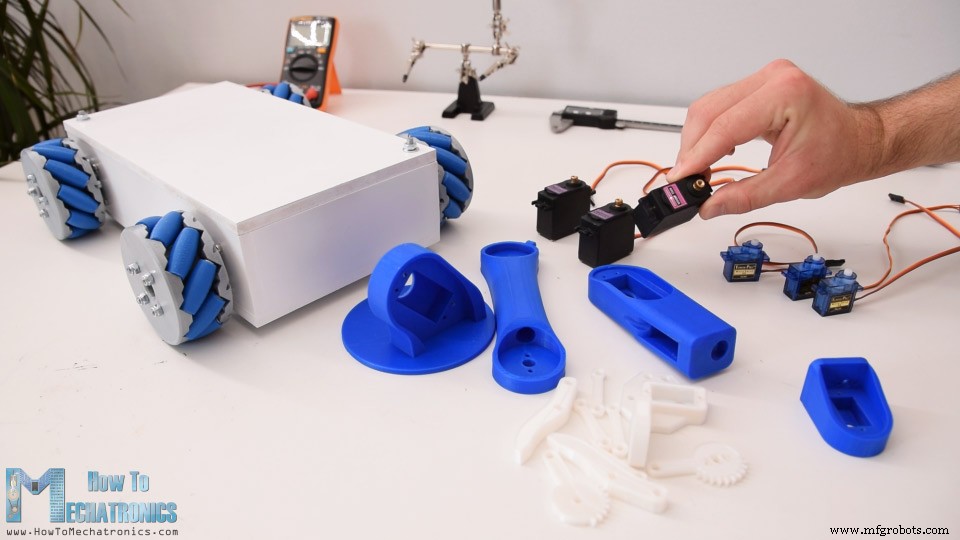
Кроме того, здесь у меня есть напечатанные на 3D-принтере детали манипулятора робота и серводвигателей, и теперь я покажу вам, как их собрать. Вот 3D-модель этого проекта.
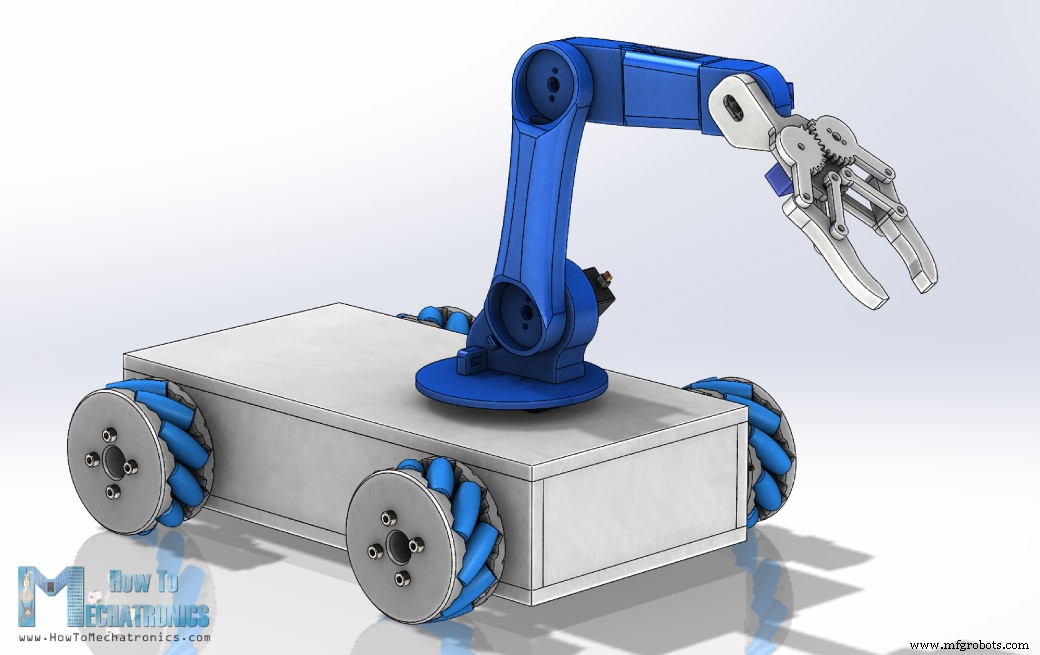
Вы можете найти и скачать эту 3D-модель, а также изучить ее в своем браузере на Thangs.
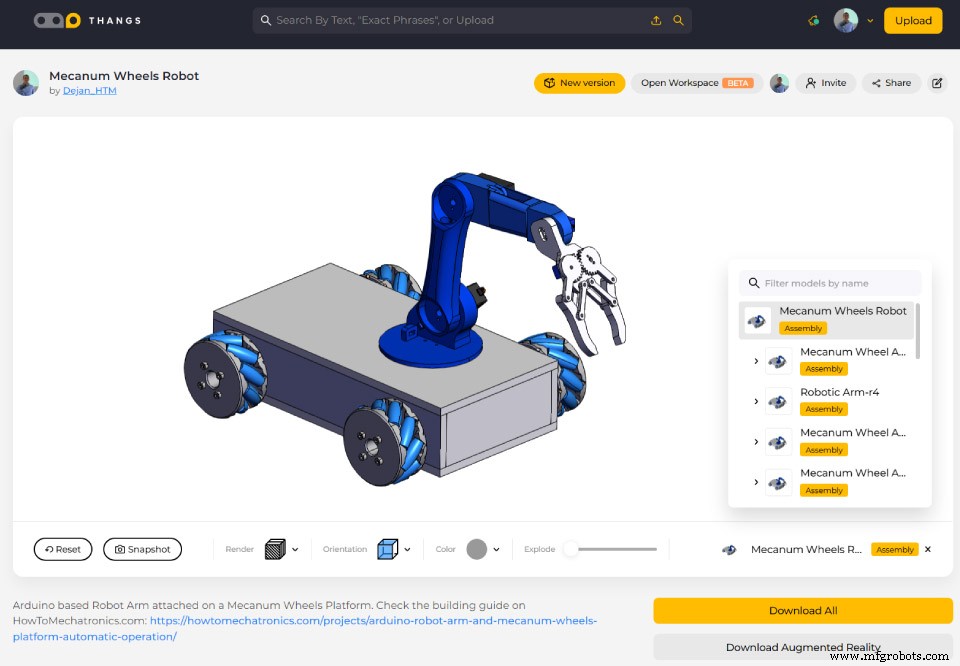
Загрузите 3D-модель на сайте Thangs.
Файлы STL для 3D-печати:
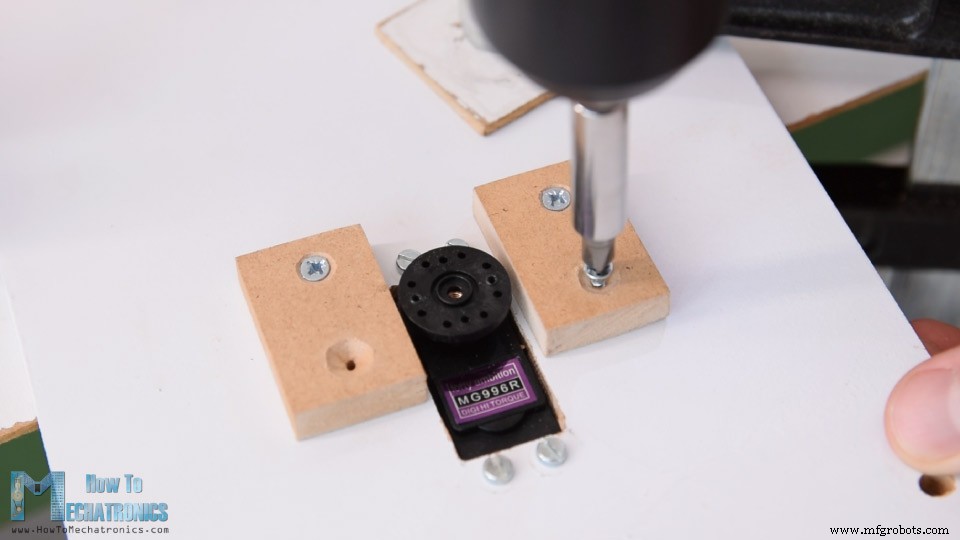
Первый сервопривод манипулятора будет установлен непосредственно на верхней крышке платформы Mecanum Wheels.
Я отметил место и сверлом на 10 мм проделал несколько отверстий.

Затем с помощью рашпиля я прорезал отверстия, а затем точно настроил отверстие для сервопривода. Я прикрепил сервопривод к верхней пластине с помощью четырех болтов и гаек M3.

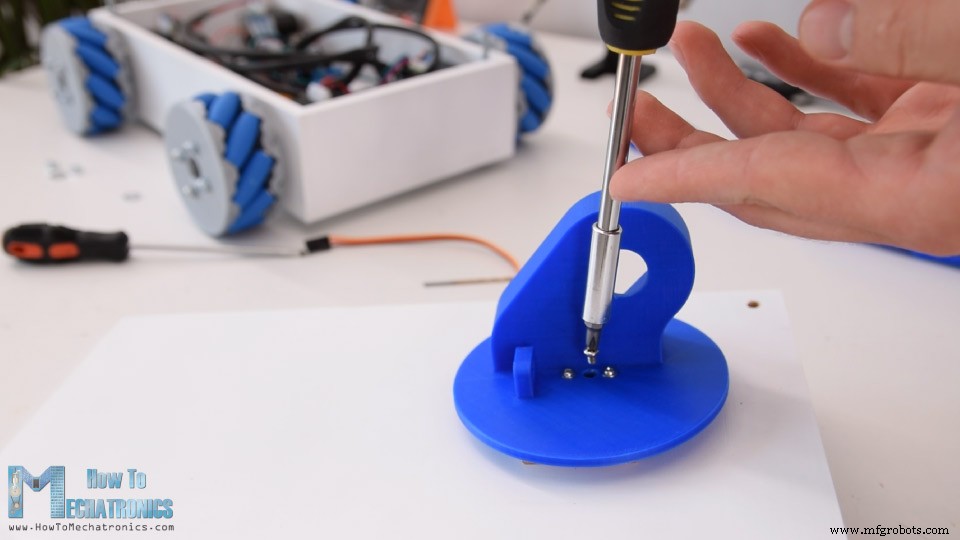
Затем на этот выходной вал этого сервопривода, используя круглый рожок, который идет в комплекте с сервоприводом, нам нужно прикрепить следующую часть или пояс манипулятора робота. Однако мы можем заметить, что таким образом деталь остается примерно на 8 мм выше пластины. Поэтому я прикрепил два куска плит МДФ толщиной 8 мм, чтобы поясная часть могла скользить по ним и чтобы соединение было более стабильным.
Круглый рупор крепится к поясной части с помощью саморезов, которые входят в комплект поставки сервопривода, а затем круглый рупор крепится к валу сервопривода с помощью соответствующих болтов, которые также поставляются с сервоприводом.
Далее у нас есть плечевой сервопривод. Мы просто устанавливаем его на место и крепим к напечатанной на 3D-принтере детали с помощью саморезов.
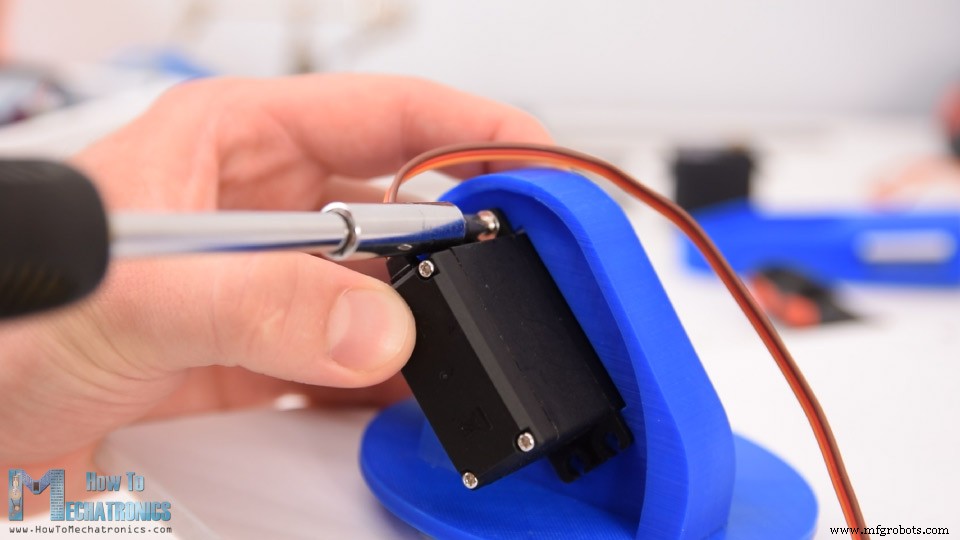
Круглый рог надевается на следующую часть, а затем две части крепятся друг к другу с помощью болта на выходном валу сервопривода.

Следует отметить, что перед тем, как закрепить детали, нам нужно убедиться, что деталь имеет полный диапазон движения. Здесь я также добавил резинку к плечевому суставу, чтобы она немного помогала сервоприводу, потому что этот сервопривод несет вес остальной части руки, а также полезную нагрузку.

Таким же образом я собрал остальную часть манипулятора.

Далее нам нужно собрать механизм захвата. Захват управляется серводвигателем SG90, на который сначала мы прикрепляем специально разработанное зубчатое звено. Мы соединяем это звено с другим зубчатым звеном с другой стороны, которое крепится с помощью болта и гаек M4. На самом деле все остальные звенья соединяются с помощью болтов и гаек М4.
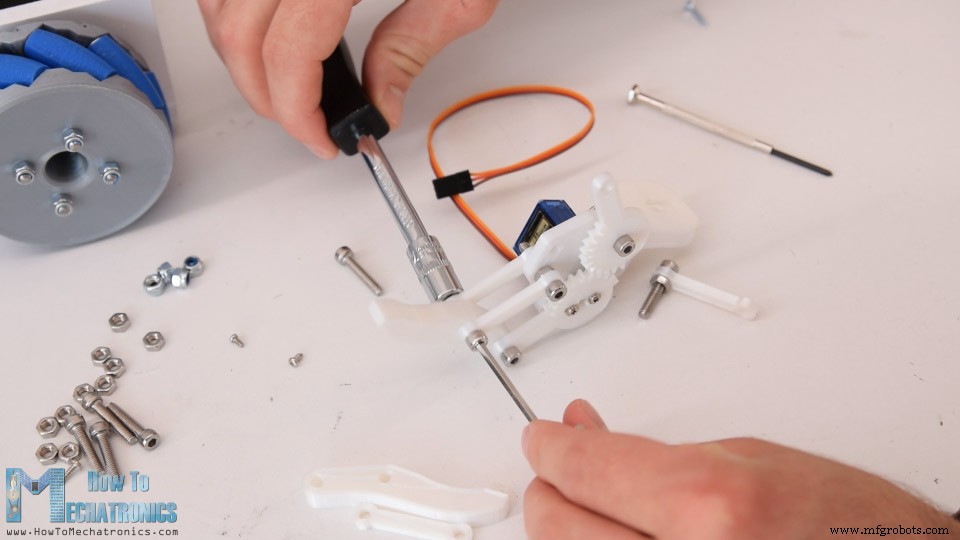
3D-модель захвата изначально имеет отверстия диаметром 3 мм, но у меня не хватило болтов М3, поэтому я расширил отверстия с помощью сверла 4 мм и вместо них использовал болты М4.
Собрав механизм захвата, я прикрепил его к последнему сервоприводу, и рука робота была готова.
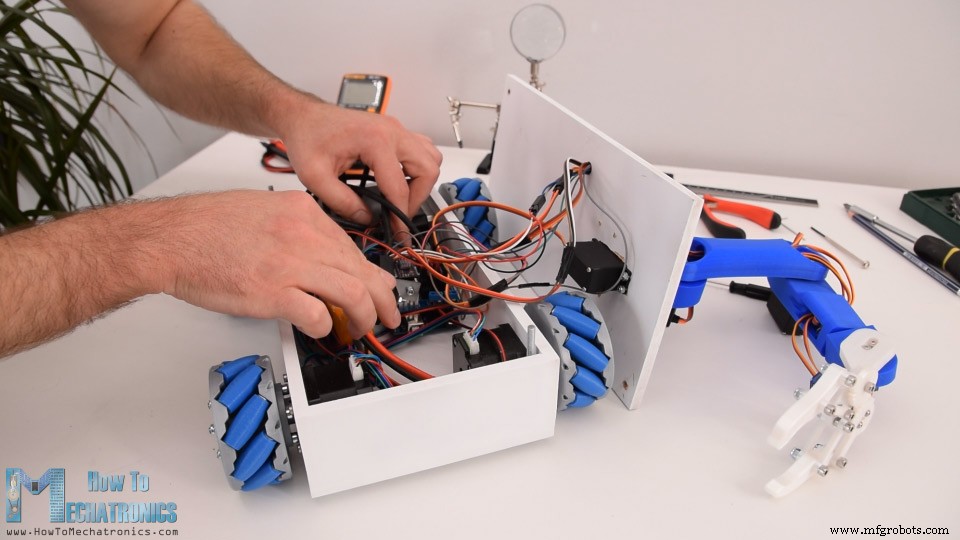
Далее я занялся кабель-менеджментом. Я пропустил сервопровода через специально разработанные отверстия манипулятора робота. Используя 10-миллиметровое сверло, я сделал отверстие в верхней пластине, чтобы провода могли проходить через него.
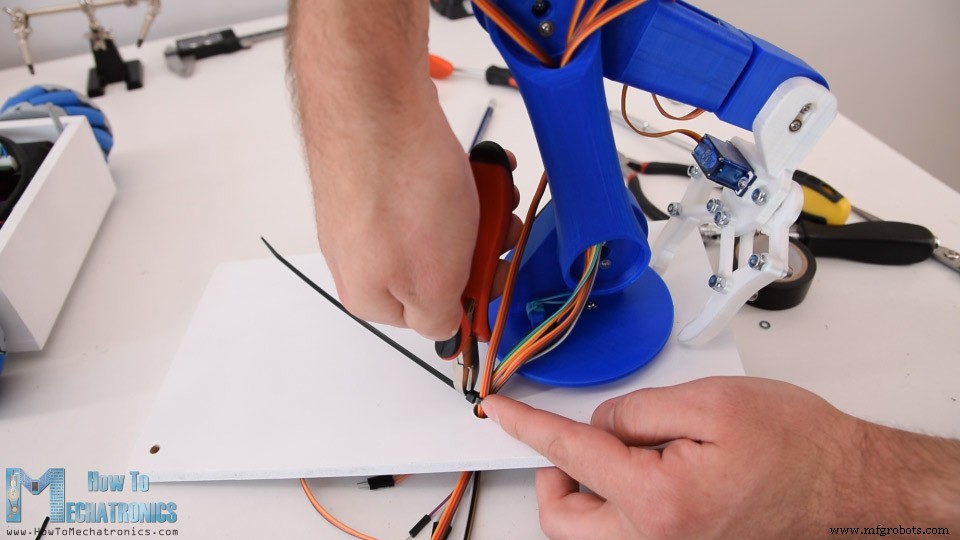
С помощью стяжки я скрепил все провода вместе, и теперь осталось подключить их к плате Arduino.
Схема робота Arduino
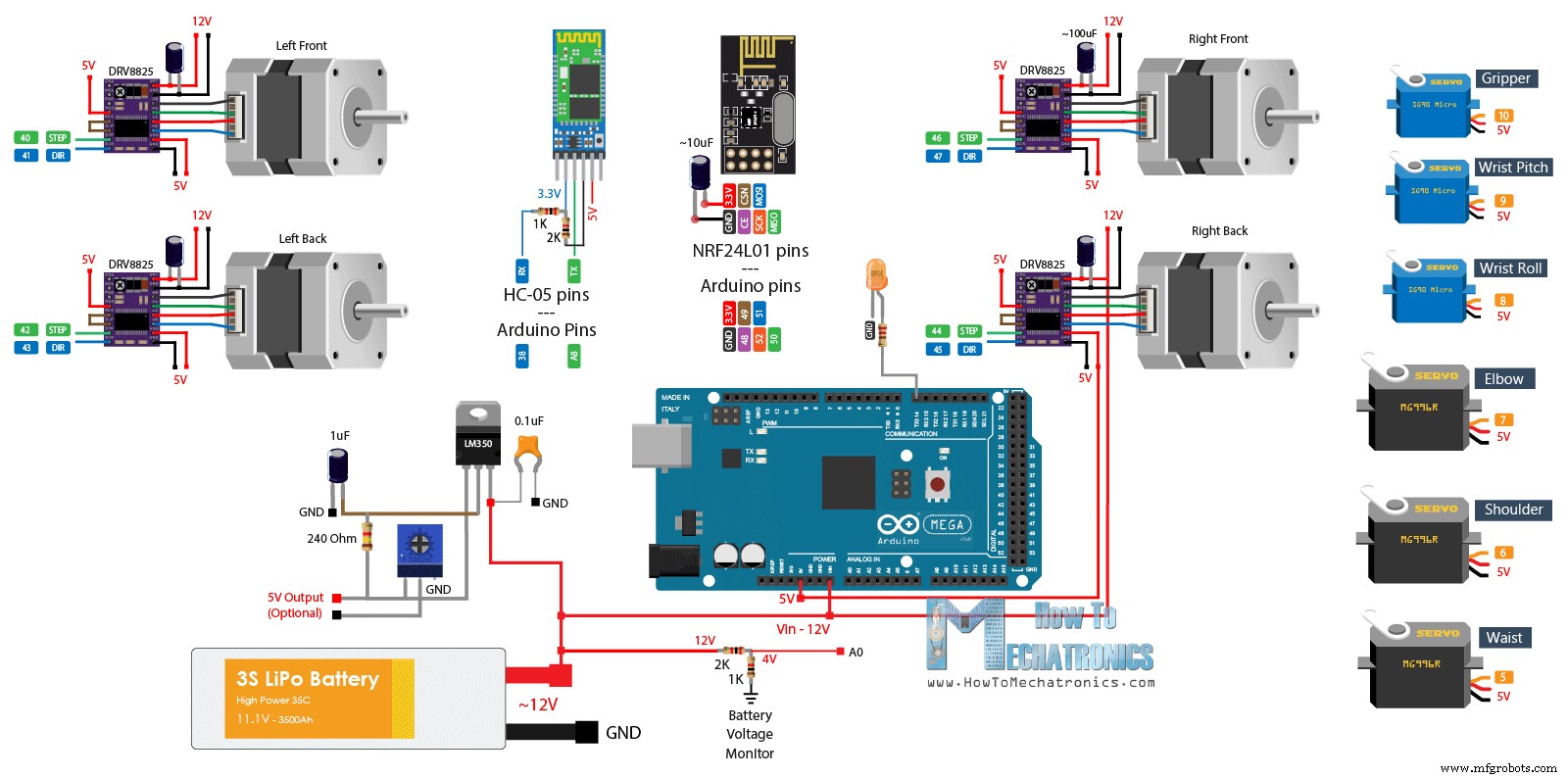
Вот принципиальная схема этого проекта и то, как все должно быть подключено.
Вы можете получить компоненты, необходимые для этого проекта, по ссылкам ниже:
- Шаговый двигатель — NEMA 17 …………..…
- Драйвер шагового двигателя DRV8825……….…….…
- Серводвигатель MG996R………………….….
- Микро серводвигатель SG90 …………….….
- Модуль Bluetooth HC-05 …………….…
- Литий-полимерный аккумулятор …………………………….……
- Arduino Mega Board ………….……….…
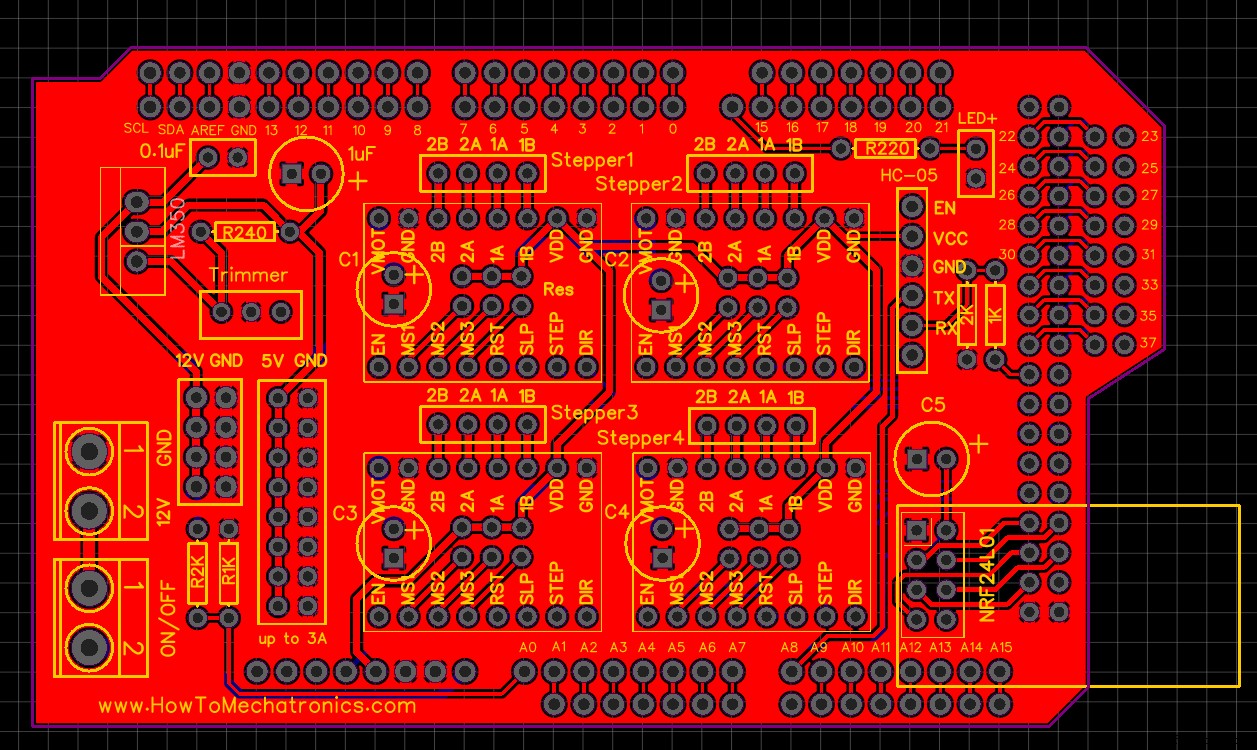
В предыдущем уроке я объяснил, как работает часть робота Mecanum с колесами, а также показал, как я сделал для него специальную печатную плату.
Я включил регулятор напряжения 5 В на эту плату, чтобы мы могли сделать этот проект, или подключить серводвигатели, потому что они работают на 5 В. Регулятор напряжения - LM350, который может выдерживать ток до 3 ампер. Все шесть сервоприводов манипулятора могут потреблять от 2 до 3 ампер тока, что означает, что он может справиться с ними, но это приведет к сильному нагреву регулятора.
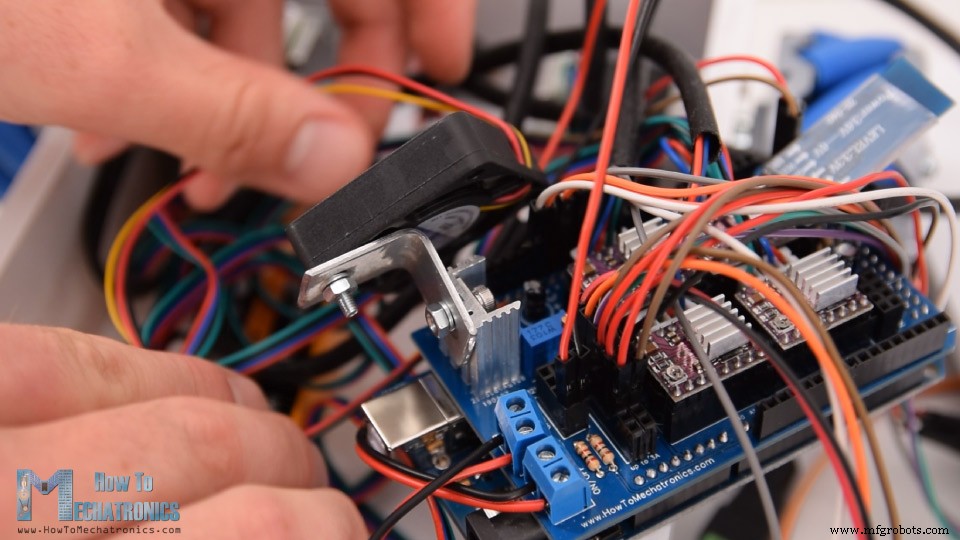
Поэтому я прикрепил к нему радиатор, а также небольшой вентилятор постоянного тока на 12 В для обдува воздуха, потому что самого радиатора недостаточно для охлаждения регулятора.
Я подключил сигнальные провода сервоприводов к цифровым контактам Arduino с 5 по 10, а для питания использовал контактный разъем 5V на печатной плате. Наконец, я протолкнул все провода внутрь платформы и прикрепил к ней верхнюю пластину с помощью двух гаек.
Вот и все, теперь мы закончили с этим проектом.
Код Arduino
Осталось посмотреть, как работает код Arduino и приложение для Android. Так как код немного длиннее, для лучшего понимания я буду размещать исходный код программы в разделах с описанием для каждого раздела. А в конце этой статьи я выложу полный исходный код.
Итак, сначала нам нужно определить 6 сервоприводов, 4 шаговых двигателя и связь Bluetooth, а также определить некоторые переменные, необходимые для программы ниже. В разделе настройки мы устанавливаем максимальную скорость шаговых двигателей, определяем контакты, к которым подключены сервоприводы, начинаем связь Bluetooth и устанавливаем манипулятор робота в исходное положение.
#include <SoftwareSerial.h>
#include <AccelStepper.h>
#include <Servo.h>
Servo servo01;
Servo servo02;
Servo servo03;
Servo servo04;
Servo servo05;
Servo servo06;
SoftwareSerial Bluetooth(A8, 38); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX)
// Define the stepper motors and the pins the will use
AccelStepper LeftBackWheel(1, 42, 43); // (Type:driver, STEP, DIR) - Stepper1
AccelStepper LeftFrontWheel(1, 40, 41); // Stepper2
AccelStepper RightBackWheel(1, 44, 45); // Stepper3
AccelStepper RightFrontWheel(1, 46, 47); // Stepper4
#define led 14
int wheelSpeed = 1500;
int lbw[50], lfw[50], rbw[50], rfw[50]; // arrays for storing positions/steps
int servo1Pos, servo2Pos, servo3Pos, servo4Pos, servo5Pos, servo6Pos; // current position
int servo1PPos, servo2PPos, servo3PPos, servo4PPos, servo5PPos, servo6PPos; // previous position
int servo01SP[50], servo02SP[50], servo03SP[50], servo04SP[50], servo05SP[50], servo06SP[50]; // for storing positions/steps
int speedDelay = 20;
int index = 0;
int dataIn;
int m = 0;
void setup() {
// Set initial seed values for the steppers
LeftFrontWheel.setMaxSpeed(3000);
LeftBackWheel.setMaxSpeed(3000);
RightFrontWheel.setMaxSpeed(3000);
RightBackWheel.setMaxSpeed(3000);
pinMode(led, OUTPUT);
servo01.attach(5);
servo02.attach(6);
servo03.attach(7);
servo04.attach(8);
servo05.attach(9);
servo06.attach(10);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(5);
delay(20);
Serial.begin(38400);
// Move robot arm to initial position
servo1PPos = 90;
servo01.write(servo1PPos);
servo2PPos = 100;
servo02.write(servo2PPos);
servo3PPos = 120;
servo03.write(servo3PPos);
servo4PPos = 95;
servo04.write(servo4PPos);
servo5PPos = 60;
servo05.write(servo5PPos);
servo6PPos = 110;
servo06.write(servo6PPos);
}Code language: Arduino (arduino)Затем в разделе цикла мы начинаем с проверки наличия входящих данных.
// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.read(); // Read the dataCode language: Arduino (arduino)Эти данные поступают со смартфона или из приложения для Android, поэтому давайте посмотрим, какие данные они на самом деле отправляют. Приложение для Android создано с использованием онлайн-приложения MIT App Inventor. Он состоит из простых кнопок с соответствующими изображениями в качестве фона.
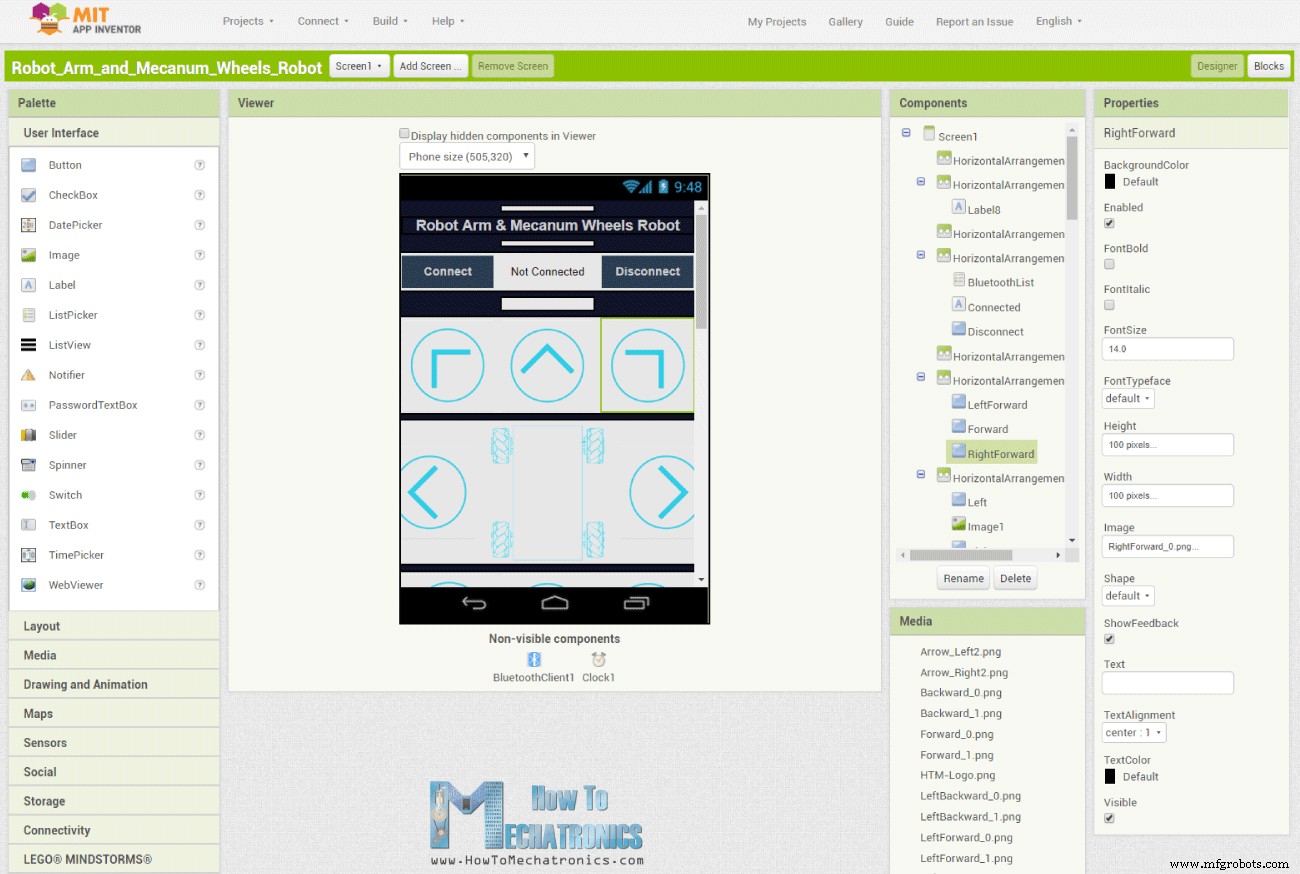
Если мы посмотрим на блоки приложения, то увидим, что все, что оно делает, это отправляет однобайтовые числа при нажатии кнопок.
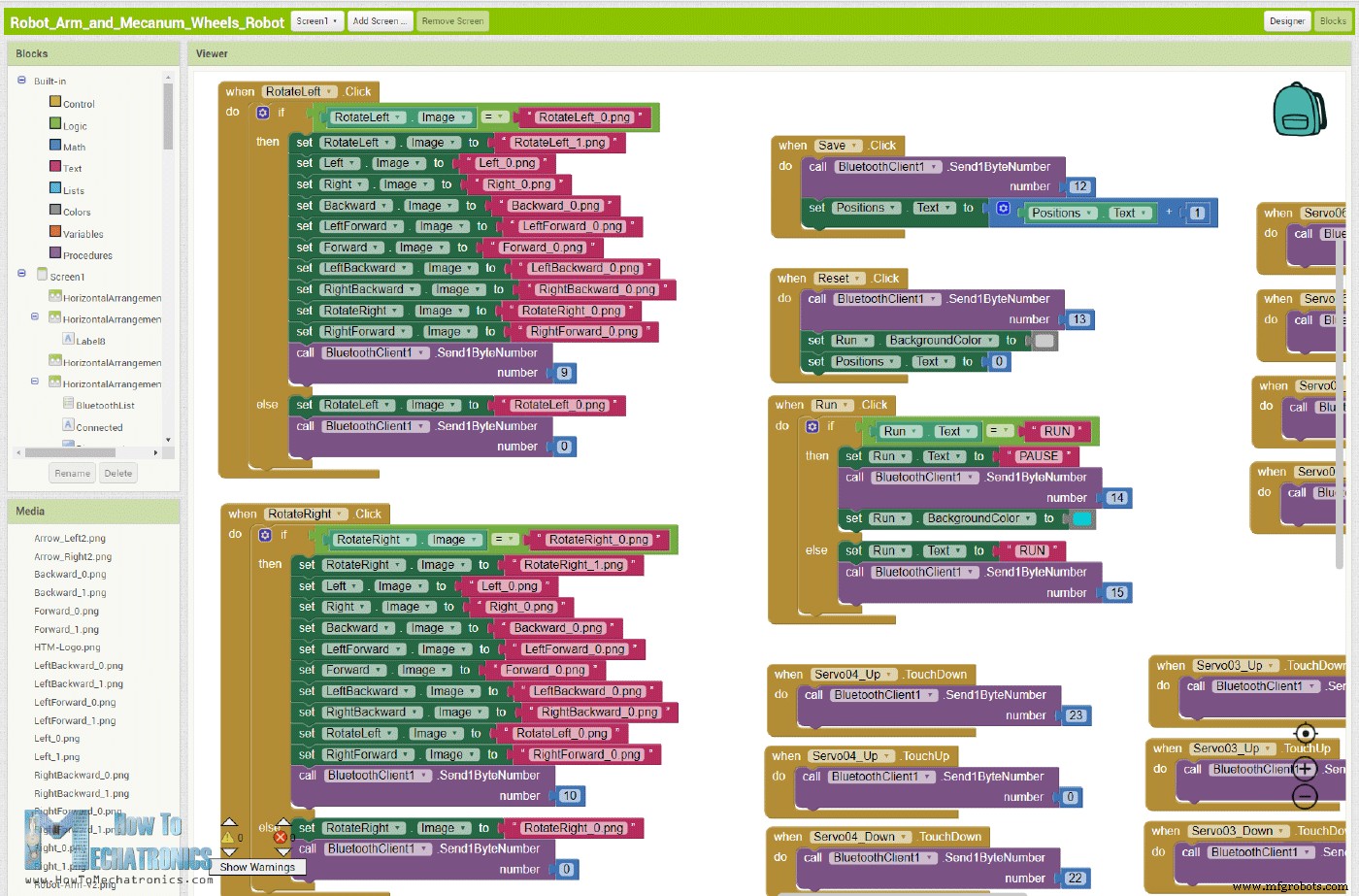
Итак, в зависимости от нажатой кнопки мы сообщаем Arduino, что делать. Например, если мы получим число «2», платформа колес mecanum будет двигаться вперед, используя пользовательскую функцию moveForward.
if (dataIn == 2) {
m = 2;
}
//
if (m == 2) {
moveForward();
}Code language: Arduino (arduino)Эта пользовательская функция задает вращение всех четырех шаговых двигателей вперед.
void moveForward() {
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.setSpeed(wheelSpeed);
}Code language: Arduino (arduino)Для движения в любом другом направлении нам просто нужно вращать колеса в соответствующих направлениях.
Для управления манипулятором робота мы используем тот же метод. Опять же, у нас есть кнопки в приложении, и при удержании кнопок суставы робота двигаются в определенном направлении.
Как я упоминал ранее, в оригинальном приложении для управления манипулятором робота мы использовали ползунки для управления положением сервоприводов, но это вызывало некоторые проблемы, потому что таким образом мы должны были отправлять текст в Arduino вместо 1-байтового числа. Проблема в том, что Arduino иногда пропускает текст, поступающий из приложения, и выдает ошибку, или рука робота трясется и ведет себя ненормально.
Таким образом, мы просто отправляем однобайтовое число при нажатии определенной кнопки.
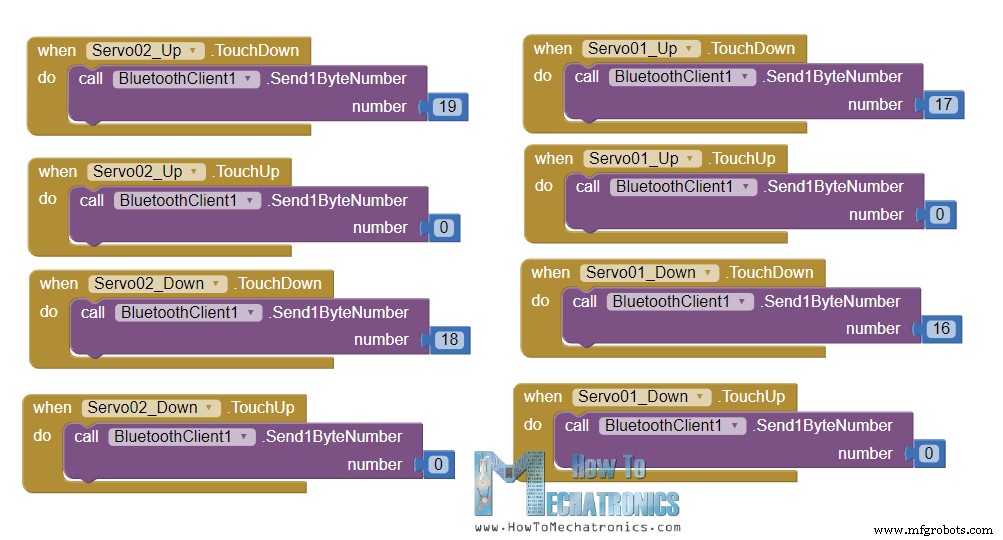
Код Arduino входит в цикл while этого числа и остается там до тех пор, пока мы не коснемся кнопки, потому что в этот момент мы отправляем число 0, что означает, что робот ничего не должен делать.
// Move servo 1 in positive direction
while (m == 16) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo01.write(servo1PPos);
servo1PPos++;
delay(speedDelay);
}
// Move servo 1 in negative direction
while (m == 17) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo01.write(servo1PPos);
servo1PPos--;
delay(speedDelay);
}Code language: Arduino (arduino)Таким образом, в зависимости от нажатых кнопок сервоприводы двигаются либо в положительном, либо в отрицательном направлении. Один и тот же принцип работы применим ко всем серводвигателям. Для изменения скорости движения мы используем значения, поступающие от ползунка в диапазоне от 100 до 250.
// If arm speed slider is changed
if (dataIn > 101 & dataIn < 250) {
speedDelay = dataIn / 10; // Change servo speed (delay time)
}Code language: Arduino (arduino)Разделив их на 10, мы получим значения от 10 до 25, которые используются в качестве задержки в микросекундах в циклах while для управления сервоприводами.
Для сохранения движений робота мы просто сохраняем текущие положения сервоприводов и шаговых двигателей в массивы каждый раз, когда нажимаем кнопку «Сохранить».
// If button "SAVE" is pressed
if (m == 12) {
//if it's initial save, set the steppers position to 0
if (index == 0) {
LeftBackWheel.setCurrentPosition(0);
LeftFrontWheel.setCurrentPosition(0);
RightBackWheel.setCurrentPosition(0);
RightFrontWheel.setCurrentPosition(0);
}
lbw[index] = LeftBackWheel.currentPosition(); // save position into the array
lfw[index] = LeftFrontWheel.currentPosition();
rbw[index] = RightBackWheel.currentPosition();
rfw[index] = RightFrontWheel.currentPosition();
servo01SP[index] = servo1PPos; // save position into the array
servo02SP[index] = servo2PPos;
servo03SP[index] = servo3PPos;
servo04SP[index] = servo4PPos;
servo05SP[index] = servo5PPos;
servo06SP[index] = servo6PPos;
index++; // Increase the array index
m = 0;
}Code language: Arduino (arduino)Затем, когда мы нажимаем кнопку «Выполнить», мы вызываем пользовательскую функцию runSteps(). Эта пользовательская функция выполняет все сохраненные шаги, используя некоторые циклы for и while.
if (m == 14) {
runSteps();
// If button "RESET" is pressed
if (dataIn != 14) {
stopMoving();
memset(lbw, 0, sizeof(lbw)); // Clear the array data to 0
memset(lfw, 0, sizeof(lfw));
memset(rbw, 0, sizeof(rbw));
memset(rfw, 0, sizeof(rfw));
memset(servo01SP, 0, sizeof(servo01SP)); // Clear the array data to 0
memset(servo02SP, 0, sizeof(servo02SP));
memset(servo03SP, 0, sizeof(servo03SP));
memset(servo04SP, 0, sizeof(servo04SP));
memset(servo05SP, 0, sizeof(servo05SP));
memset(servo06SP, 0, sizeof(servo06SP));
index = 0; // Index to 0
}
}Code language: Arduino (arduino)Мы должны отметить, что он начинается с первой позиции и идет последней позиции, и повторяет это снова и снова. Следовательно, при сохранении шагов нам действительно нужно расположить робота таким образом, чтобы первый шаг имел то же положение, что и последний шаг. Во время выполнения шагов мы также можем изменить скорость как платформы, так и манипулятора робота, а также приостановить и сбросить все шаги.
Здесь вы можете скачать это приложение, а также редактируемый файл проекта:
Вот полный код Arduino для этого проекта робота Arduino:
/*
Arduino Robot Arm and Mecanum Wheels Robot
Smartphone Control via Bluetooth
by Dejan, www.HowToMechatronics.com
*/
#include <SoftwareSerial.h>
#include <AccelStepper.h>
#include <Servo.h>
Servo servo01;
Servo servo02;
Servo servo03;
Servo servo04;
Servo servo05;
Servo servo06;
SoftwareSerial Bluetooth(A8, 38); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX)
// Define the stepper motors and the pins the will use
AccelStepper LeftBackWheel(1, 42, 43); // (Type:driver, STEP, DIR) - Stepper1
AccelStepper LeftFrontWheel(1, 40, 41); // Stepper2
AccelStepper RightBackWheel(1, 44, 45); // Stepper3
AccelStepper RightFrontWheel(1, 46, 47); // Stepper4
#define led 14
int wheelSpeed = 1500;
int lbw[50], lfw[50], rbw[50], rfw[50]; // arrays for storing positions/steps
int servo1Pos, servo2Pos, servo3Pos, servo4Pos, servo5Pos, servo6Pos; // current position
int servo1PPos, servo2PPos, servo3PPos, servo4PPos, servo5PPos, servo6PPos; // previous position
int servo01SP[50], servo02SP[50], servo03SP[50], servo04SP[50], servo05SP[50], servo06SP[50]; // for storing positions/steps
int speedDelay = 20;
int index = 0;
int dataIn;
int m = 0;
void setup() {
// Set initial seed values for the steppers
LeftFrontWheel.setMaxSpeed(3000);
LeftBackWheel.setMaxSpeed(3000);
RightFrontWheel.setMaxSpeed(3000);
RightBackWheel.setMaxSpeed(3000);
pinMode(led, OUTPUT);
servo01.attach(5);
servo02.attach(6);
servo03.attach(7);
servo04.attach(8);
servo05.attach(9);
servo06.attach(10);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(5);
delay(20);
Serial.begin(38400);
// Move robot arm to initial position
servo1PPos = 90;
servo01.write(servo1PPos);
servo2PPos = 100;
servo02.write(servo2PPos);
servo3PPos = 120;
servo03.write(servo3PPos);
servo4PPos = 95;
servo04.write(servo4PPos);
servo5PPos = 60;
servo05.write(servo5PPos);
servo6PPos = 110;
servo06.write(servo6PPos);
}
void loop() {
// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.read(); // Read the data
if (dataIn == 0) {
m = 0;
}
if (dataIn == 1) {
m = 1;
}
if (dataIn == 2) {
m = 2;
}
if (dataIn == 3) {
m = 3;
}
if (dataIn == 4) {
m = 4;
}
if (dataIn == 5) {
m = 5;
}
if (dataIn == 6) {
m = 6;
}
if (dataIn == 7) {
m = 7;
}
if (dataIn == 8) {
m = 8;
}
if (dataIn == 9) {
m = 9;
}
if (dataIn == 10) {
m = 10;
}
if (dataIn == 11) {
m = 11;
}
if (dataIn == 12) {
m = 12;
}
if (dataIn == 14) {
m = 14;
}
if (dataIn == 16) {
m = 16;
}
if (dataIn == 17) {
m = 17;
}
if (dataIn == 18) {
m = 18;
}
if (dataIn == 19) {
m = 19;
}
if (dataIn == 20) {
m = 20;
}
if (dataIn == 21) {
m = 21;
}
if (dataIn == 22) {
m = 22;
}
if (dataIn == 23) {
m = 23;
}
if (dataIn == 24) {
m = 24;
}
if (dataIn == 25) {
m = 25;
}
if (dataIn == 26) {
m = 26;
}
if (dataIn == 27) {
m = 27;
}
// Move the Mecanum wheels platform
if (m == 4) {
moveSidewaysLeft();
}
if (m == 5) {
moveSidewaysRight();
}
if (m == 2) {
moveForward();
}
if (m == 7) {
moveBackward();
}
if (m == 3) {
moveRightForward();
}
if (m == 1) {
moveLeftForward();
}
if (m == 8) {
moveRightBackward();
}
if (m == 6) {
moveLeftBackward();
}
if (m == 9) {
rotateLeft();
}
if (m == 10) {
rotateRight();
}
if (m == 0) {
stopMoving();
}
// Mecanum wheels speed
if (dataIn > 30 & dataIn < 100) {
wheelSpeed = dataIn * 20;
}
// Move robot arm
// Move servo 1 in positive direction
while (m == 16) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo01.write(servo1PPos);
servo1PPos++;
delay(speedDelay);
}
// Move servo 1 in negative direction
while (m == 17) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo01.write(servo1PPos);
servo1PPos--;
delay(speedDelay);
}
// Move servo 2
while (m == 19) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo02.write(servo2PPos);
servo2PPos++;
delay(speedDelay);
}
while (m == 18) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo02.write(servo2PPos);
servo2PPos--;
delay(speedDelay);
}
// Move servo 3
while (m == 20) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo03.write(servo3PPos);
servo3PPos++;
delay(speedDelay);
}
while (m == 21) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo03.write(servo3PPos);
servo3PPos--;
delay(speedDelay);
}
// Move servo 4
while (m == 23) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo04.write(servo4PPos);
servo4PPos++;
delay(speedDelay);
}
while (m == 22) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo04.write(servo4PPos);
servo4PPos--;
delay(speedDelay);
}
// Move servo 5
while (m == 25) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo05.write(servo5PPos);
servo5PPos++;
delay(speedDelay);
}
while (m == 24) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo05.write(servo5PPos);
servo5PPos--;
delay(speedDelay);
}
// Move servo 6
while (m == 26) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo06.write(servo6PPos);
servo6PPos++;
delay(speedDelay);
}
while (m == 27) {
if (Bluetooth.available() > 0) {
m = Bluetooth.read();
}
servo06.write(servo6PPos);
servo6PPos--;
delay(speedDelay);
}
// If arm speed slider is changed
if (dataIn > 101 & dataIn < 250) {
speedDelay = dataIn / 10; // Change servo speed (delay time)
}
// If button "SAVE" is pressed
if (m == 12) {
//if it's initial save, set the steppers position to 0
if (index == 0) {
LeftBackWheel.setCurrentPosition(0);
LeftFrontWheel.setCurrentPosition(0);
RightBackWheel.setCurrentPosition(0);
RightFrontWheel.setCurrentPosition(0);
}
lbw[index] = LeftBackWheel.currentPosition(); // save position into the array
lfw[index] = LeftFrontWheel.currentPosition();
rbw[index] = RightBackWheel.currentPosition();
rfw[index] = RightFrontWheel.currentPosition();
servo01SP[index] = servo1PPos; // save position into the array
servo02SP[index] = servo2PPos;
servo03SP[index] = servo3PPos;
servo04SP[index] = servo4PPos;
servo05SP[index] = servo5PPos;
servo06SP[index] = servo6PPos;
index++; // Increase the array index
m = 0;
}
// If button "RUN" is pressed
if (m == 14) {
runSteps();
// If button "RESET" is pressed
if (dataIn != 14) {
stopMoving();
memset(lbw, 0, sizeof(lbw)); // Clear the array data to 0
memset(lfw, 0, sizeof(lfw));
memset(rbw, 0, sizeof(rbw));
memset(rfw, 0, sizeof(rfw));
memset(servo01SP, 0, sizeof(servo01SP)); // Clear the array data to 0
memset(servo02SP, 0, sizeof(servo02SP));
memset(servo03SP, 0, sizeof(servo03SP));
memset(servo04SP, 0, sizeof(servo04SP));
memset(servo05SP, 0, sizeof(servo05SP));
memset(servo06SP, 0, sizeof(servo06SP));
index = 0; // Index to 0
}
}
}
LeftFrontWheel.runSpeed();
LeftBackWheel.runSpeed();
RightFrontWheel.runSpeed();
RightBackWheel.runSpeed();
// Monitor the battery voltage
int sensorValue = analogRead(A0);
float voltage = sensorValue * (5.0 / 1023.00) * 3; // Convert the reading values from 5v to suitable 12V i
//Serial.println(voltage);
// If voltage is below 11V turn on the LED
if (voltage < 11) {
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
void moveForward() {
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.setSpeed(wheelSpeed);
}
void moveBackward() {
LeftFrontWheel.setSpeed(-wheelSpeed);
LeftBackWheel.setSpeed(-wheelSpeed);
RightFrontWheel.setSpeed(-wheelSpeed);
RightBackWheel.setSpeed(-wheelSpeed);
}
void moveSidewaysRight() {
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.setSpeed(-wheelSpeed);
RightFrontWheel.setSpeed(-wheelSpeed);
RightBackWheel.setSpeed(wheelSpeed);
}
void moveSidewaysLeft() {
LeftFrontWheel.setSpeed(-wheelSpeed);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.setSpeed(-wheelSpeed);
}
void rotateLeft() {
LeftFrontWheel.setSpeed(-wheelSpeed);
LeftBackWheel.setSpeed(-wheelSpeed);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.setSpeed(wheelSpeed);
}
void rotateRight() {
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.setSpeed(-wheelSpeed);
RightBackWheel.setSpeed(-wheelSpeed);
}
void moveRightForward() {
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.setSpeed(0);
RightFrontWheel.setSpeed(0);
RightBackWheel.setSpeed(wheelSpeed);
}
void moveRightBackward() {
LeftFrontWheel.setSpeed(0);
LeftBackWheel.setSpeed(-wheelSpeed);
RightFrontWheel.setSpeed(-wheelSpeed);
RightBackWheel.setSpeed(0);
}
void moveLeftForward() {
LeftFrontWheel.setSpeed(0);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.setSpeed(0);
}
void moveLeftBackward() {
LeftFrontWheel.setSpeed(-wheelSpeed);
LeftBackWheel.setSpeed(0);
RightFrontWheel.setSpeed(0);
RightBackWheel.setSpeed(-wheelSpeed);
}
void stopMoving() {
LeftFrontWheel.setSpeed(0);
LeftBackWheel.setSpeed(0);
RightFrontWheel.setSpeed(0);
RightBackWheel.setSpeed(0);
}
// Automatic mode custom function - run the saved steps
void runSteps() {
while (dataIn != 13) { // Run the steps over and over again until "RESET" button is pressed
for (int i = 0; i <= index - 2; i++) { // Run through all steps(index)
if (Bluetooth.available() > 0) { // Check for incomding data
dataIn = Bluetooth.read();
if ( dataIn == 15) { // If button "PAUSE" is pressed
while (dataIn != 14) { // Wait until "RUN" is pressed again
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.read();
if ( dataIn == 13) {
break;
}
}
}
}
// If speed slider is changed
if (dataIn > 100 & dataIn < 150) {
speedDelay = dataIn / 10; // Change servo speed (delay time)
}
// Mecanum wheels speed
if (dataIn > 30 & dataIn < 100) {
wheelSpeed = dataIn * 10;
dataIn = 14;
}
}
LeftFrontWheel.moveTo(lfw[i]);
LeftFrontWheel.setSpeed(wheelSpeed);
LeftBackWheel.moveTo(lbw[i]);
LeftBackWheel.setSpeed(wheelSpeed);
RightFrontWheel.moveTo(rfw[i]);
RightFrontWheel.setSpeed(wheelSpeed);
RightBackWheel.moveTo(rbw[i]);
RightBackWheel.setSpeed(wheelSpeed);
while (LeftBackWheel.currentPosition() != lbw[i] & LeftFrontWheel.currentPosition() != lfw[i] & RightFrontWheel.currentPosition() != rfw[i] & RightBackWheel.currentPosition() != rbw[i]) {
LeftFrontWheel.runSpeedToPosition();
LeftBackWheel.runSpeedToPosition();
RightFrontWheel.runSpeedToPosition();
RightBackWheel.runSpeedToPosition();
}
// Servo 1
if (servo01SP[i] == servo01SP[i + 1]) {
}
if (servo01SP[i] > servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j >= servo01SP[i + 1]; j--) {
servo01.write(j);
delay(speedDelay);
}
}
if (servo01SP[i] < servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j <= servo01SP[i + 1]; j++) {
servo01.write(j);
delay(speedDelay);
}
}
// Servo 2
if (servo02SP[i] == servo02SP[i + 1]) {
}
if (servo02SP[i] > servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j >= servo02SP[i + 1]; j--) {
servo02.write(j);
delay(speedDelay);
}
}
if (servo02SP[i] < servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j <= servo02SP[i + 1]; j++) {
servo02.write(j);
delay(speedDelay);
}
}
// Servo 3
if (servo03SP[i] == servo03SP[i + 1]) {
}
if (servo03SP[i] > servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j >= servo03SP[i + 1]; j--) {
servo03.write(j);
delay(speedDelay);
}
}
if (servo03SP[i] < servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j <= servo03SP[i + 1]; j++) {
servo03.write(j);
delay(speedDelay);
}
}
// Servo 4
if (servo04SP[i] == servo04SP[i + 1]) {
}
if (servo04SP[i] > servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j >= servo04SP[i + 1]; j--) {
servo04.write(j);
delay(speedDelay);
}
}
if (servo04SP[i] < servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j <= servo04SP[i + 1]; j++) {
servo04.write(j);
delay(speedDelay);
}
}
// Servo 5
if (servo05SP[i] == servo05SP[i + 1]) {
}
if (servo05SP[i] > servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j >= servo05SP[i + 1]; j--) {
servo05.write(j);
delay(speedDelay);
}
}
if (servo05SP[i] < servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j <= servo05SP[i + 1]; j++) {
servo05.write(j);
delay(speedDelay);
}
}
// Servo 6
if (servo06SP[i] == servo06SP[i + 1]) {
}
if (servo06SP[i] > servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j >= servo06SP[i + 1]; j--) {
servo06.write(j);
delay(speedDelay);
}
}
if (servo06SP[i] < servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j <= servo06SP[i + 1]; j++) {
servo06.write(j);
delay(speedDelay);
}
}
}
}
}Code language: Arduino (arduino)Так что это почти все для этого урока. Проект работает хорошо, но учтите, что он далек от совершенства. Автоматические движения могут быть не такими точными из-за проскальзывания колес меканума, а также плохой работы серводвигателей. Эти дешевые серводвигатели также могут трястись или дрожать, даже когда они не двигаются, просто потому, что им не хватает силы, чтобы выдержать вес напечатанных на 3D-принтере деталей.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и проверять мою коллекцию проектов Arduino.
Производственный процесс
- Создайте своего робота для видеостриминга, управляемого через Интернет, с помощью Arduino и Raspberry Pi
- Простой робот Pi
- Робот с сервомотором избегает препятствий
- Управление роботом Roomba с помощью Arduino и устройства Android
- Управление серводвигателем с помощью Arduino и MPU6050
- Простая и умная роботизированная рука с использованием Arduino
- Littlearm 2C:создание напечатанной на 3D-принтере руки робота Arduino
- Самодельная рука робота Arduino - управляемая жестами рук
- Локальная и удаленная программируемая роботизированная рука
- Robot сочетает в себе манипулятор для совместной работы с мобильной платформой