


Автоматическое дезинфицирующее средство для рук
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Необходимые инструменты и машины
 |
| |||
 |
| |||
|
Приложения и онлайн-сервисы
 |
| |||
| ||||
|
Об этом проекте
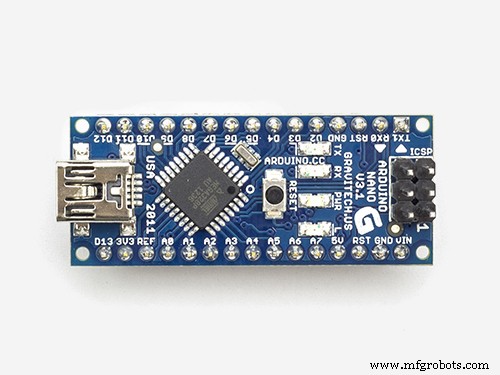
В последние месяцы пандемия COVID-19 сеет хаос по всему миру. Есть бесчисленное количество инфекций и, к сожалению, много жертв. Одна из наиболее важных мер, предлагаемых Всемирной организацией здравоохранения, - это постоянное мытье рук с мылом или дезинфицирующими средствами для рук. Но одна из наиболее значительных проблем - это то, как мы это делаем, а именно физическое прикосновение к дозатору, что полностью устраняет цель действия и даже создает большой риск заражения. Итак, Я , 14-летний мальчик , решил создать что-то, используя плату Arduino Nano, которая могла бы решить эту проблему, но я также хотел, чтобы она была дешевой и чтобы ее можно было легко, быстро и эффективно подключать ко многим различным диспенсерам! И это именно то, что я сделал, - аксессуар, который можно прикрепить к большинству дезинфицирующих средств для рук / дозаторов мыла . и переверните их полностью громкая связь и автоматический
Сначала посмотрите это видео, чтобы увидеть устройство в действии, а также понять, как оно работает и как было сделано!
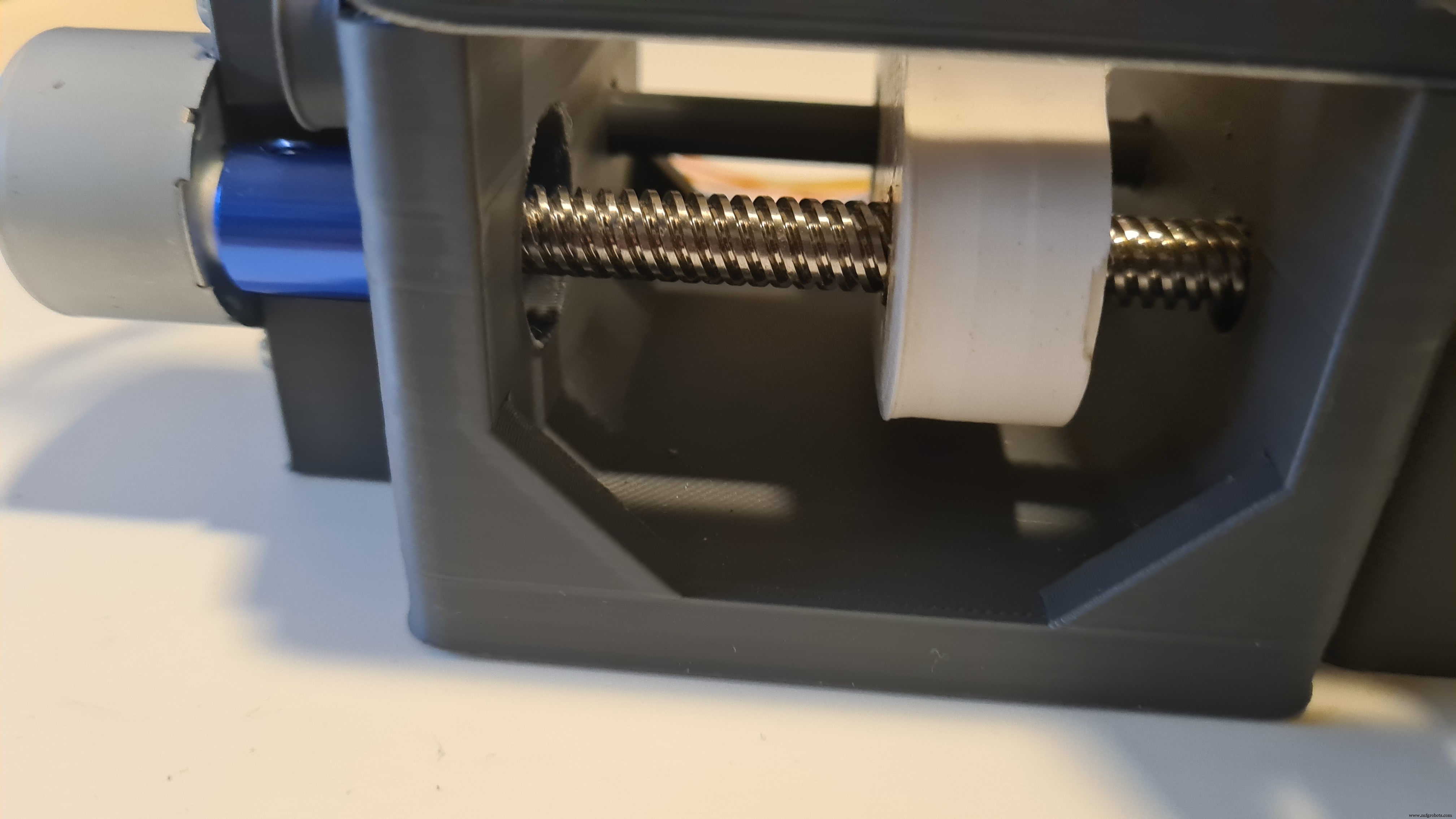
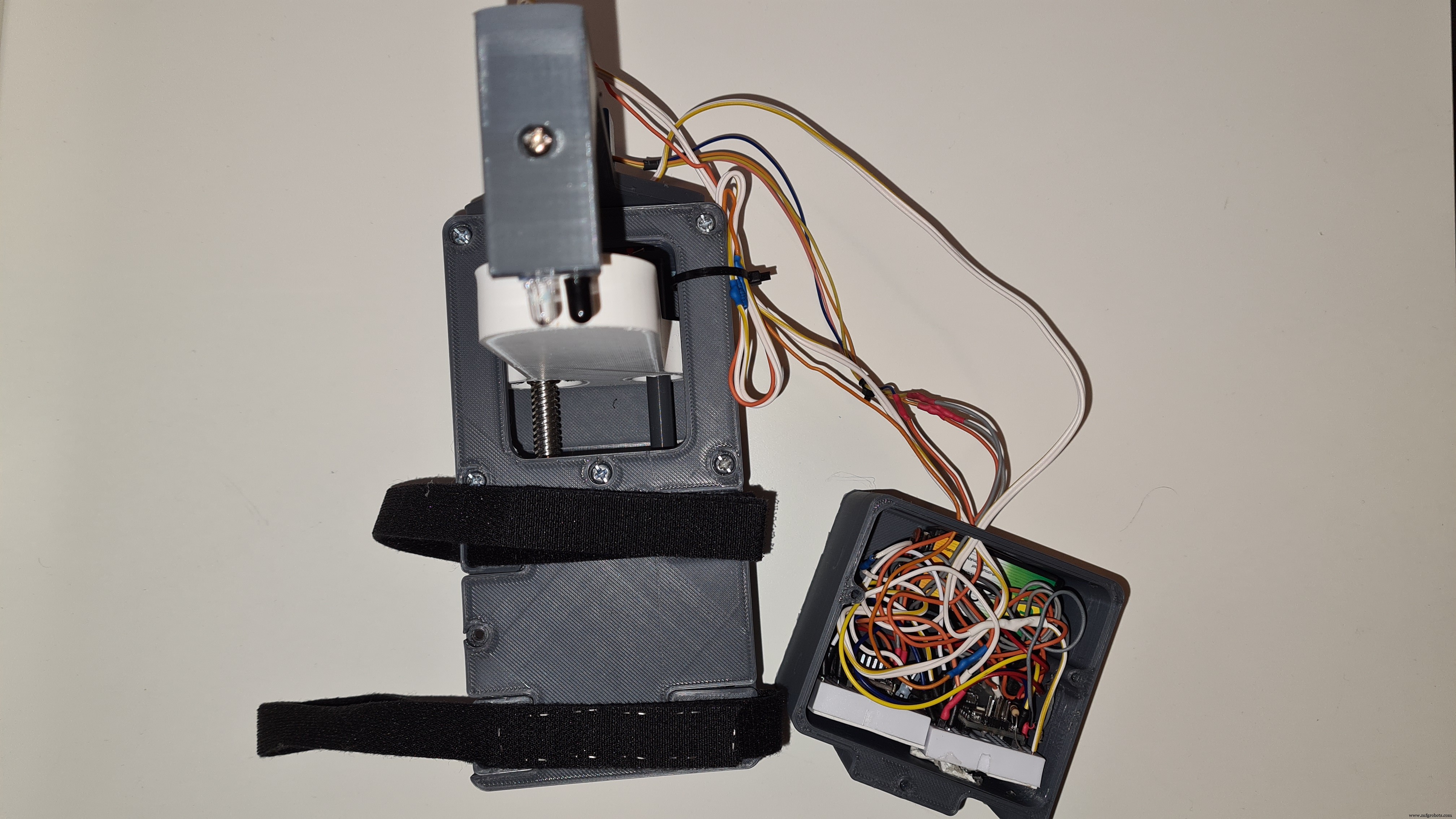
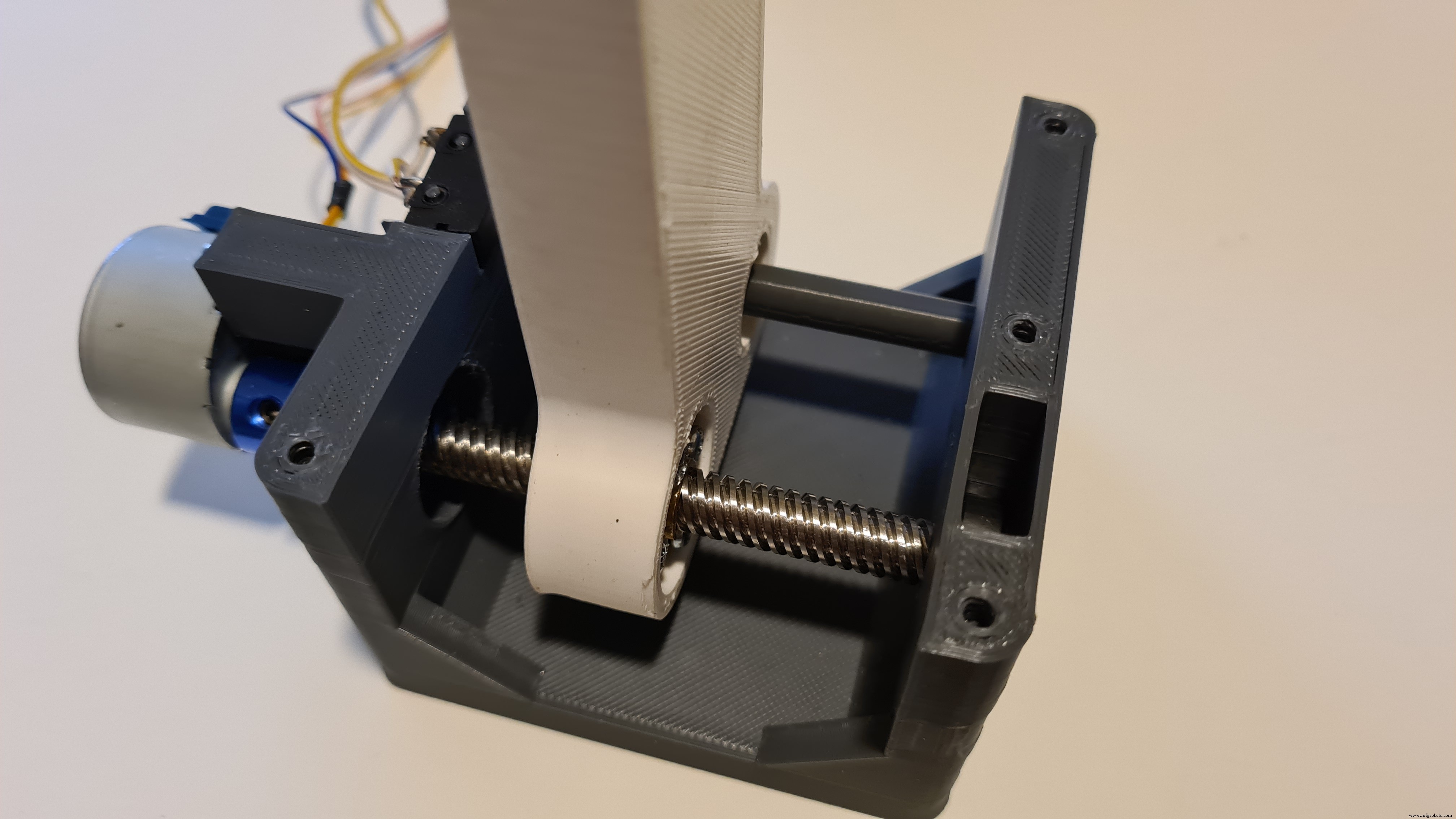
Шаг 1. Понять механизм
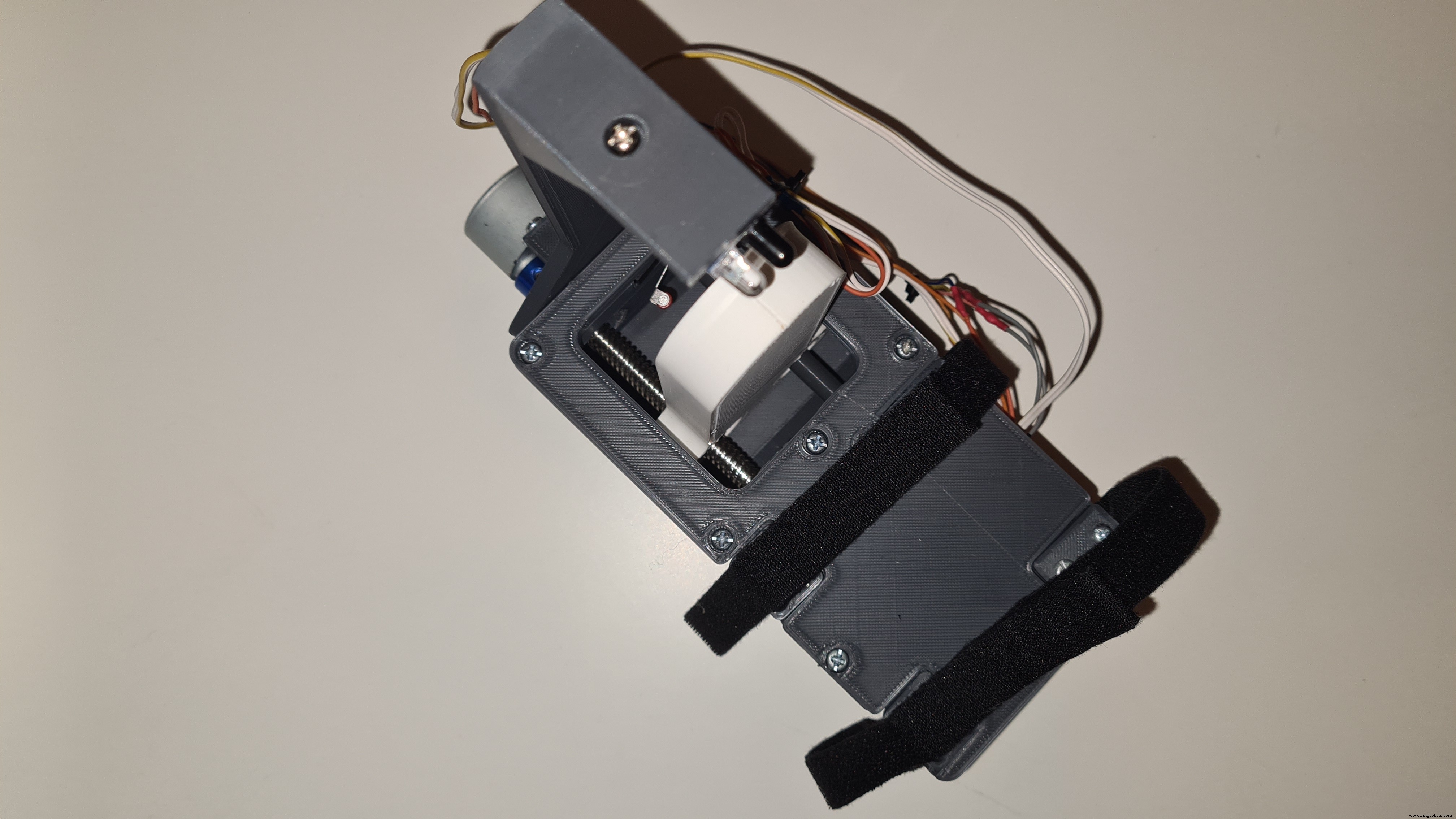


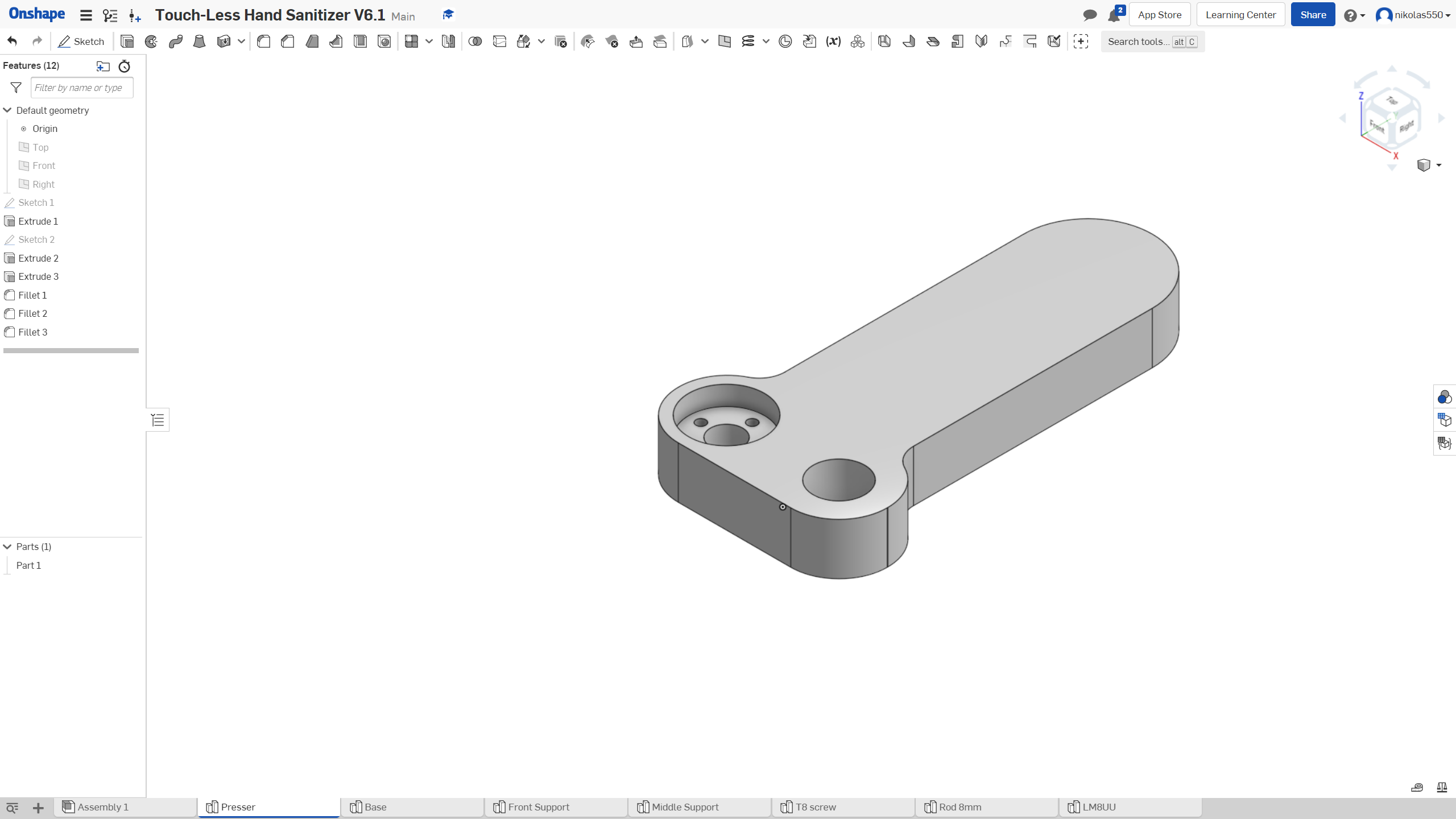
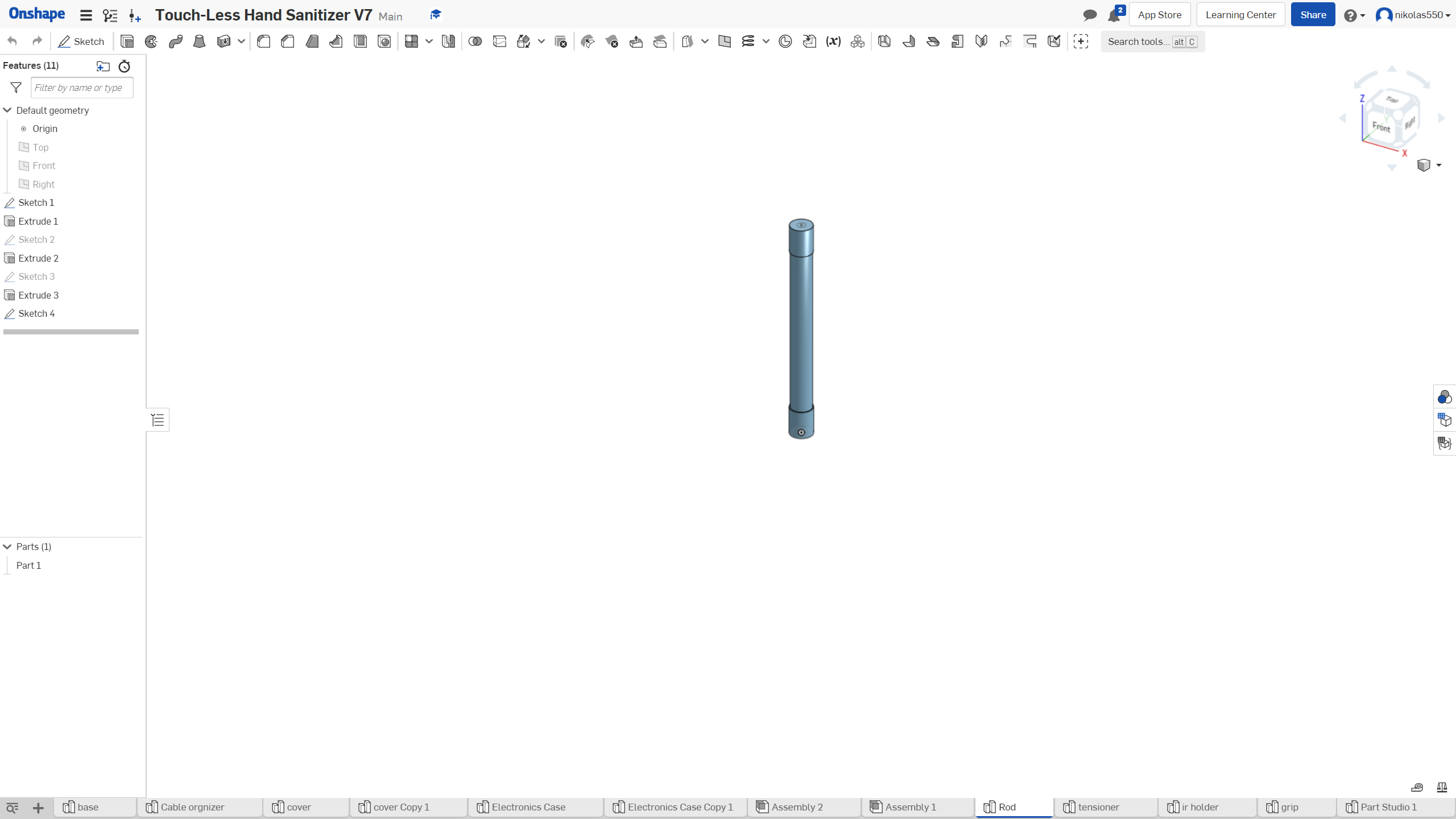
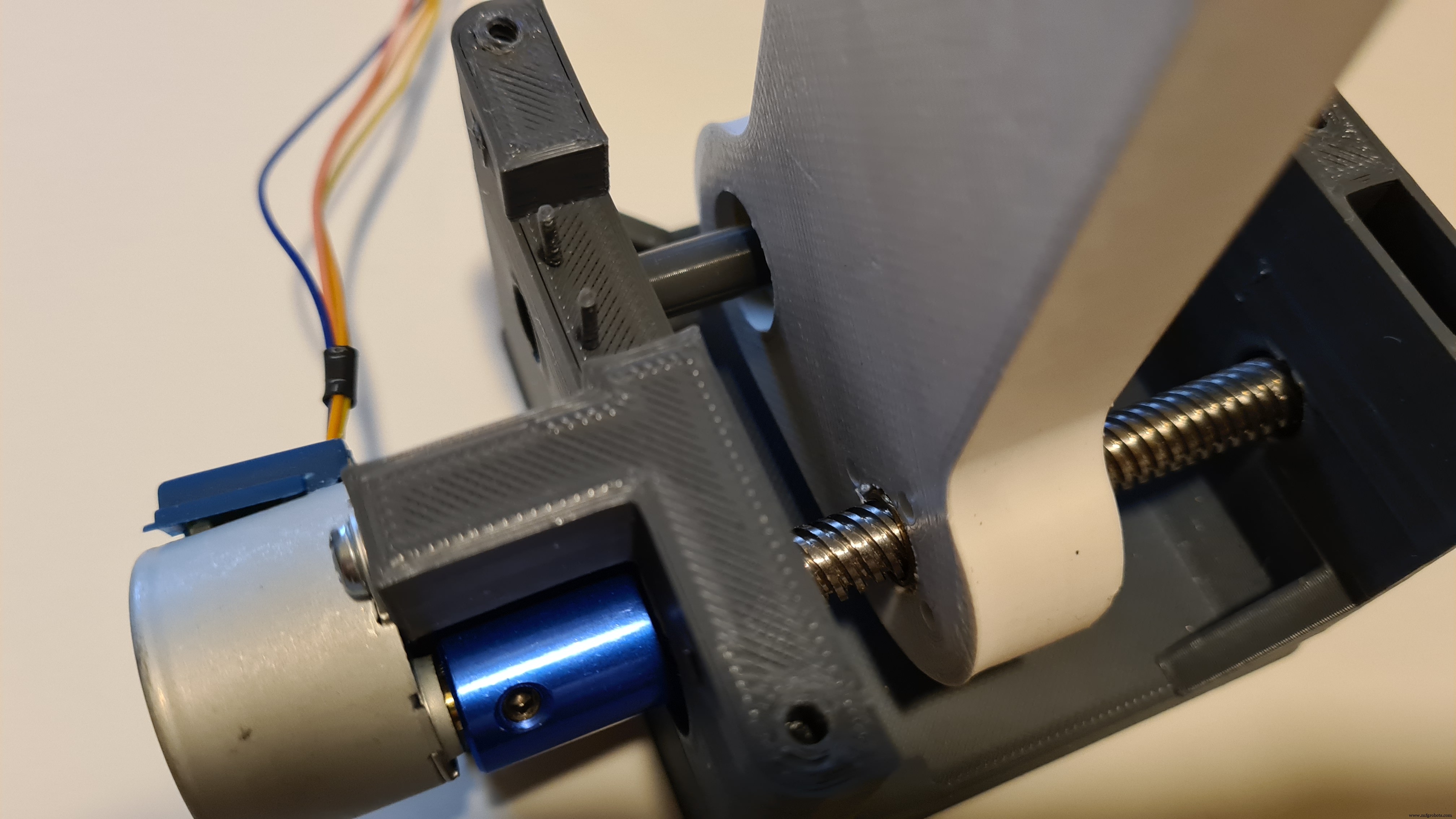
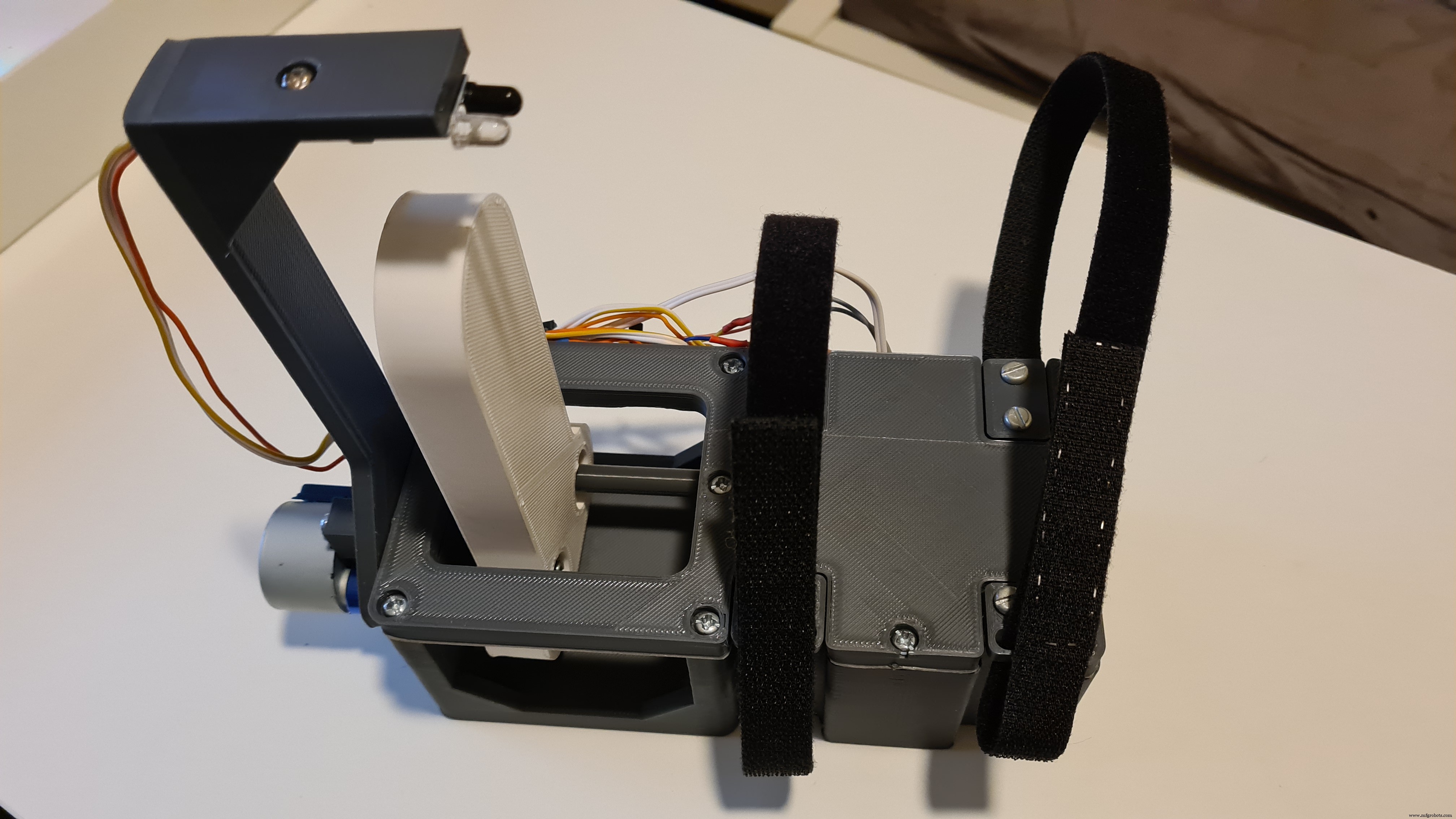
Итак, в основном шаговый двигатель соединен с помощью муфты с винтом. Затем прижимная лапка, напечатанная на 3D-принтере, с одной стороны соединяется с винтом с помощью гайки, а с другой стороны она поддерживается стержнем, напечатанным на 3D-принтере. Стержень не позволяет вращающей силе винта вращать прижим, и вместо этого прижим движется линейно . . Таким образом, мы можем приказать степперу двигаться в любом направлении (вперед и назад), с любой скоростью и на столько шагов, сколько захотим.
Шаг 2. Узнайте, как работает устройство


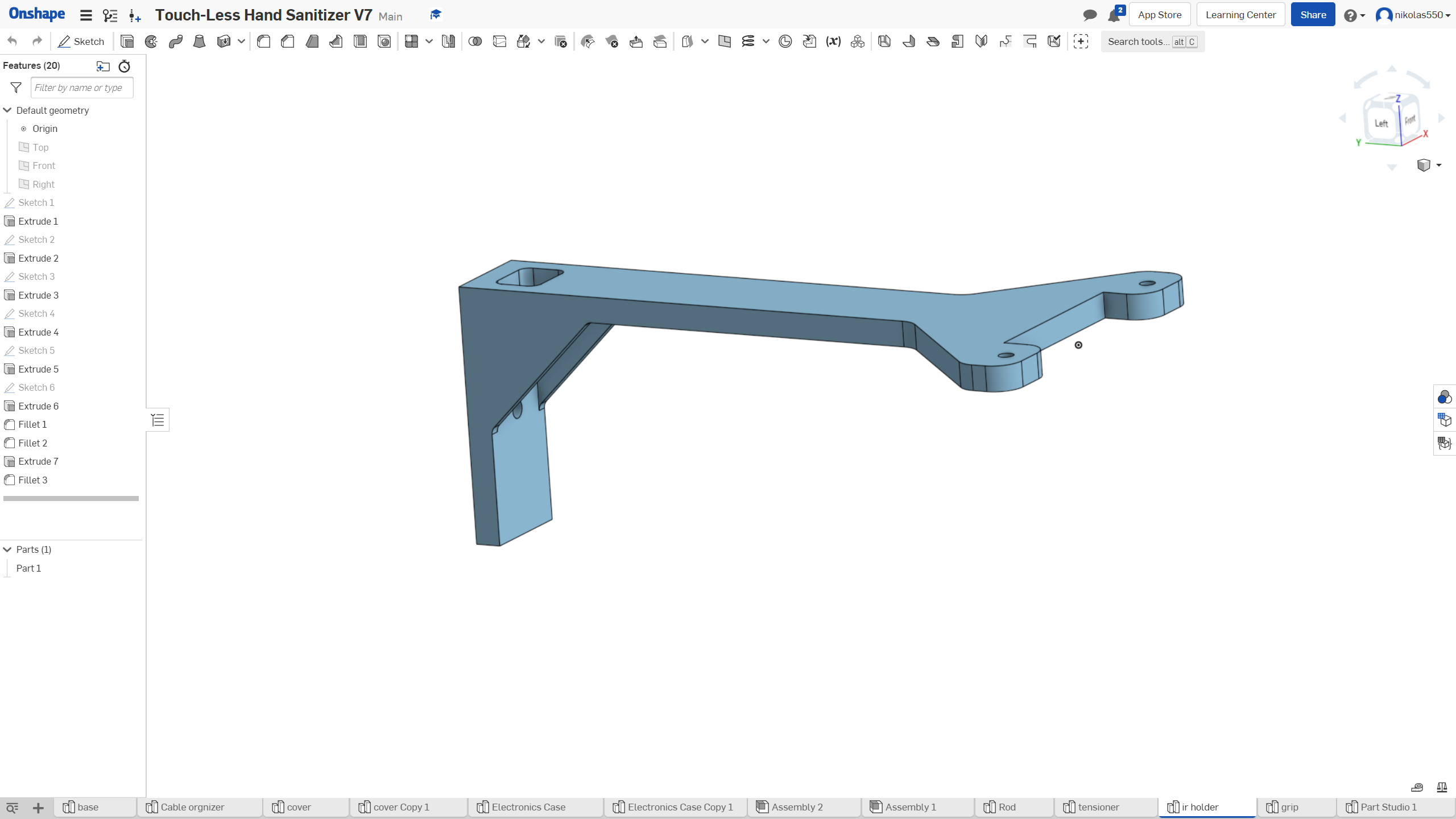
Идея состоит в том, что, когда ИК-датчик препятствий, прикрепленный к ИК-держателю, напечатанному на 3D-принтере, активируется, просто помещая вашу руку на несколько сантиметров ниже, прижим опускается на заданное расстояние (нажатие на дозатор) ждет 2 секунд, а затем возвращается в исходное положение, просто поднимаясь вверх, пока не сработает концевой выключатель. Точно так же, когда устройство впервые включается, прижим будет подниматься до тех пор, пока не активируется переключатель, а затем остановится там, как своего рода самокалибровка, чтобы прижим был готов к использованию.


Затем, используя липучку, вы оборачиваете дезинфицирующее средство для рук по вашему выбору и как можно сильнее затягиваете его.
Теперь автоматический дозатор дезинфицирующего средства для рук работает !!
Шаг 3. Соберите необходимые компоненты
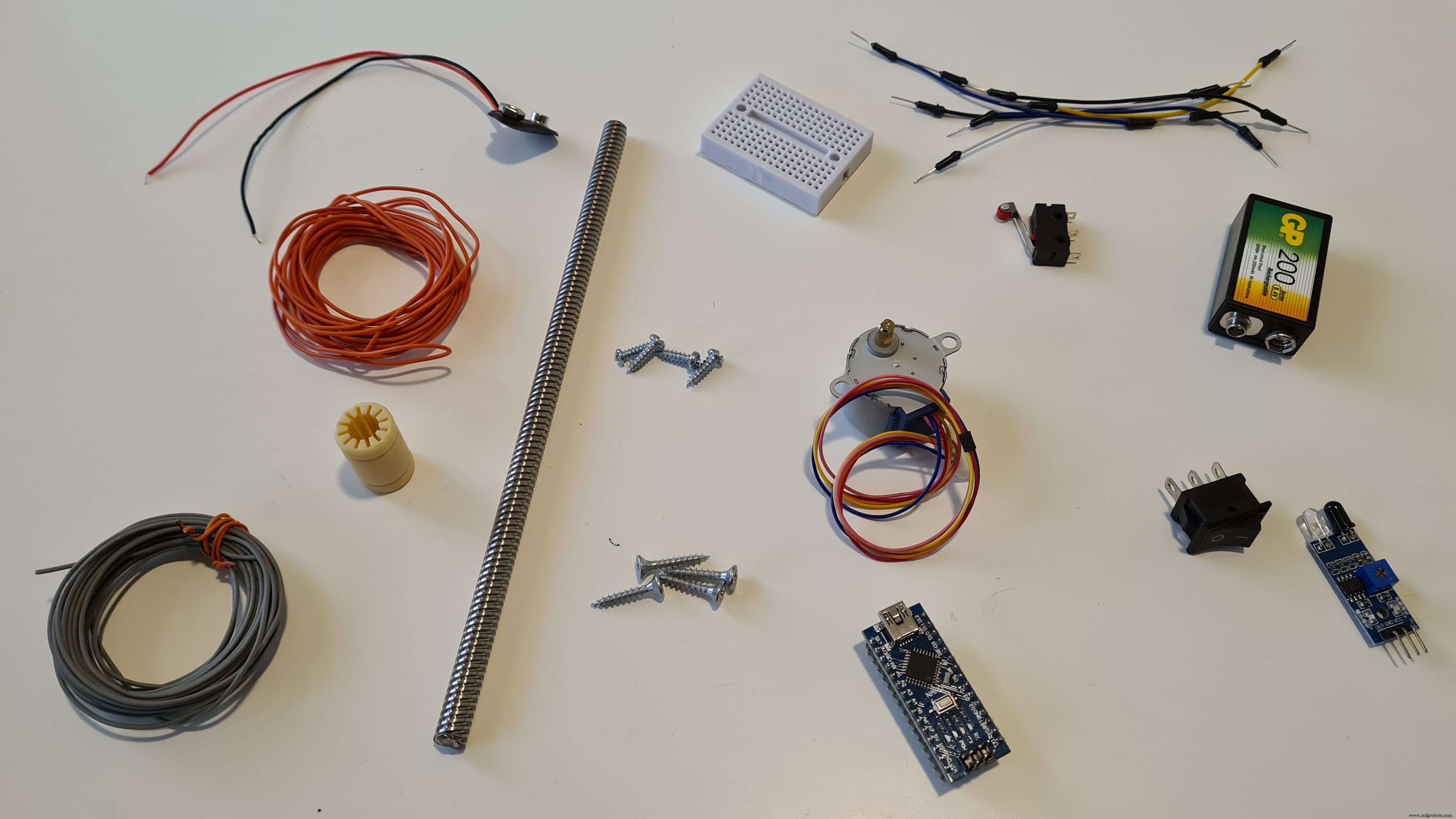
Все ссылки на необходимые компоненты находятся в разделе «Вещи».
Шаг 4. Разработка нестандартных деталей
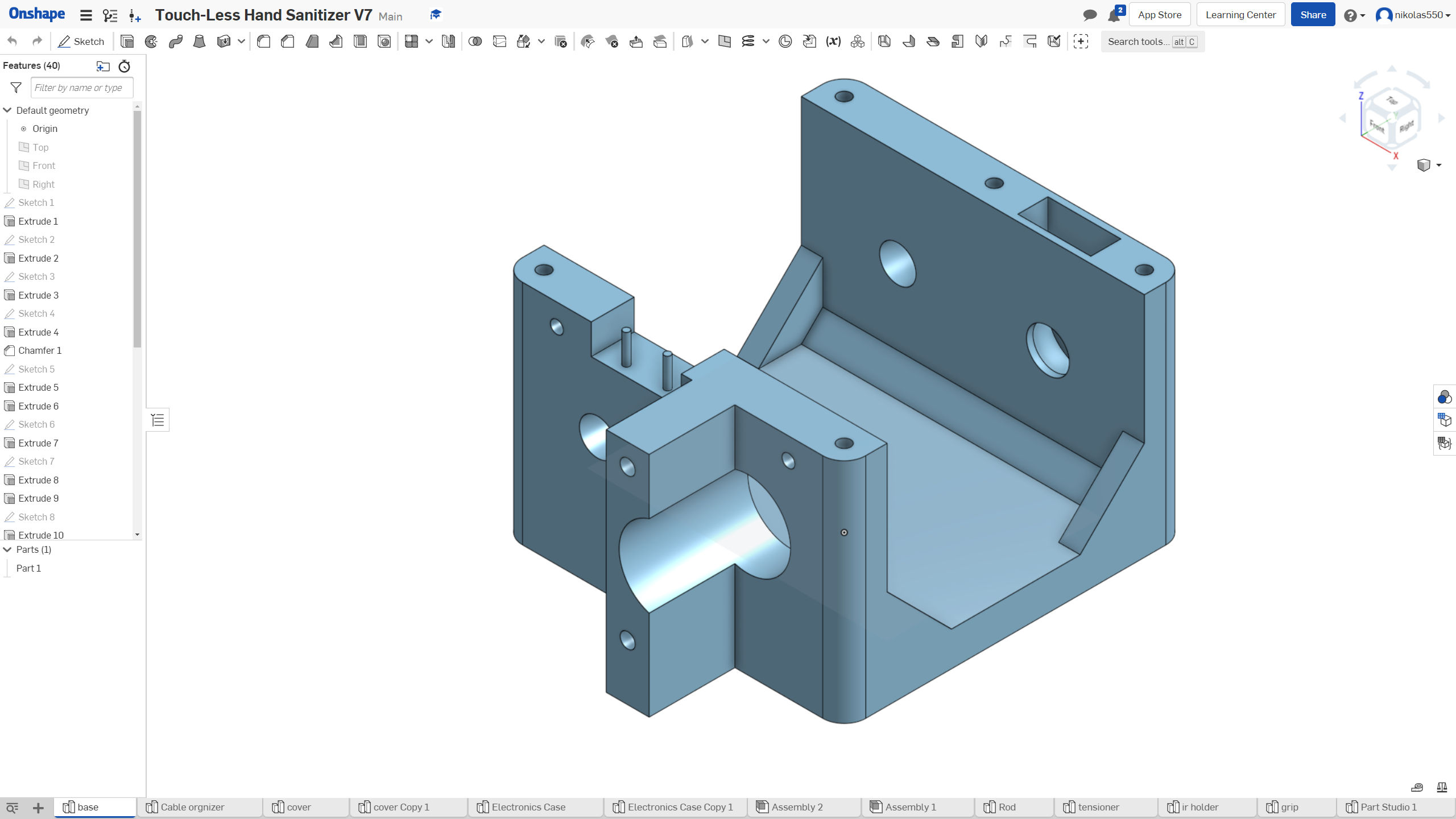
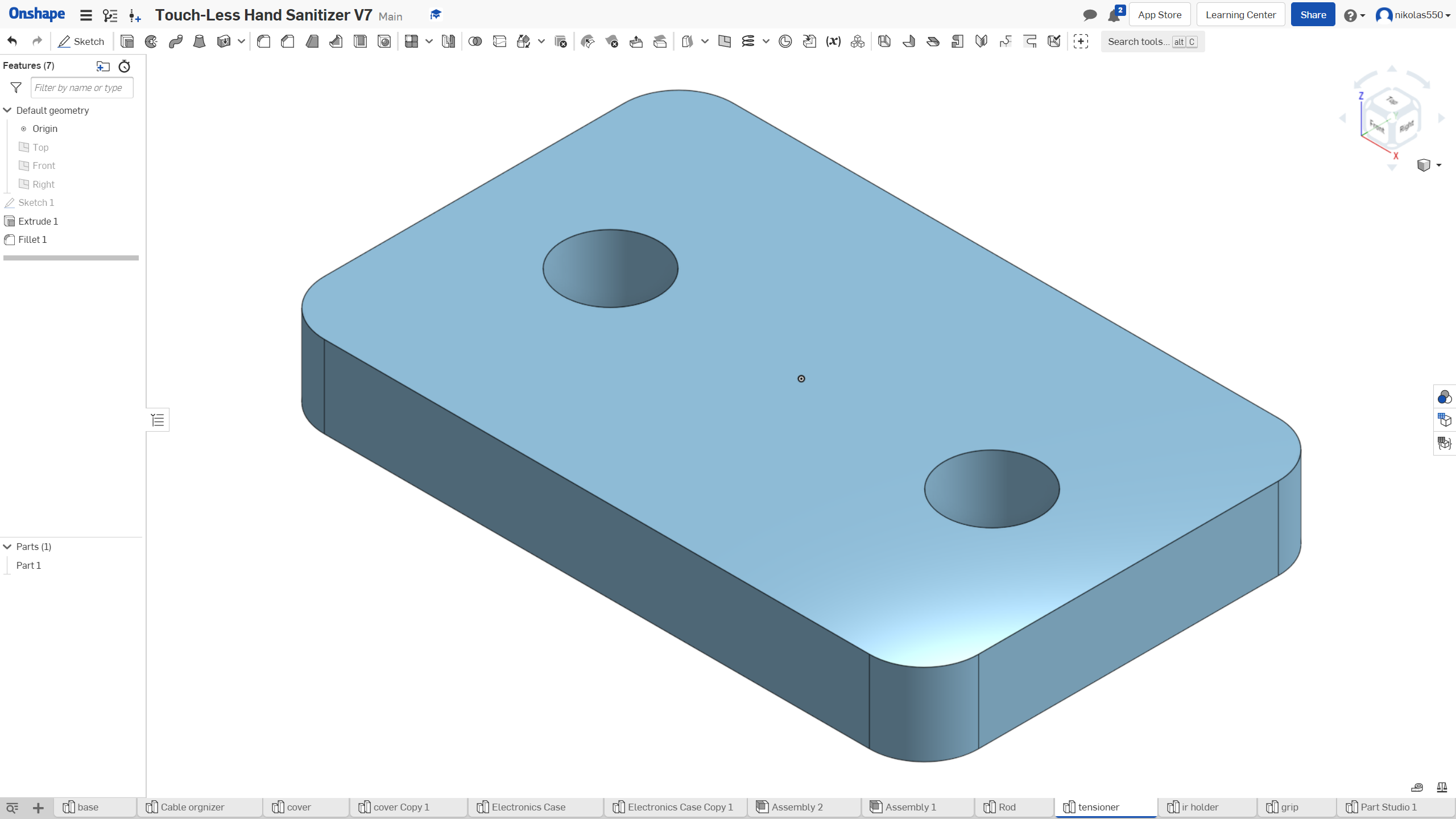
Все 3D-печатные детали были разработаны мной на Onshape, но вам не нужно беспокоиться о 3D-проектировании, потому что я предоставил все файлы .stl в разделе «Вложения».
Шаг 5:3D-печать нестандартных пластиковых деталей




Я напечатал детали на своем Creality3D Ender 3 V2 из серо-белого PLA с высотой слоя 0,2 мм и заполнением 20%. Если у вас нет доступа к 3D-принтеру, вы можете попробовать использовать картон или дерево.
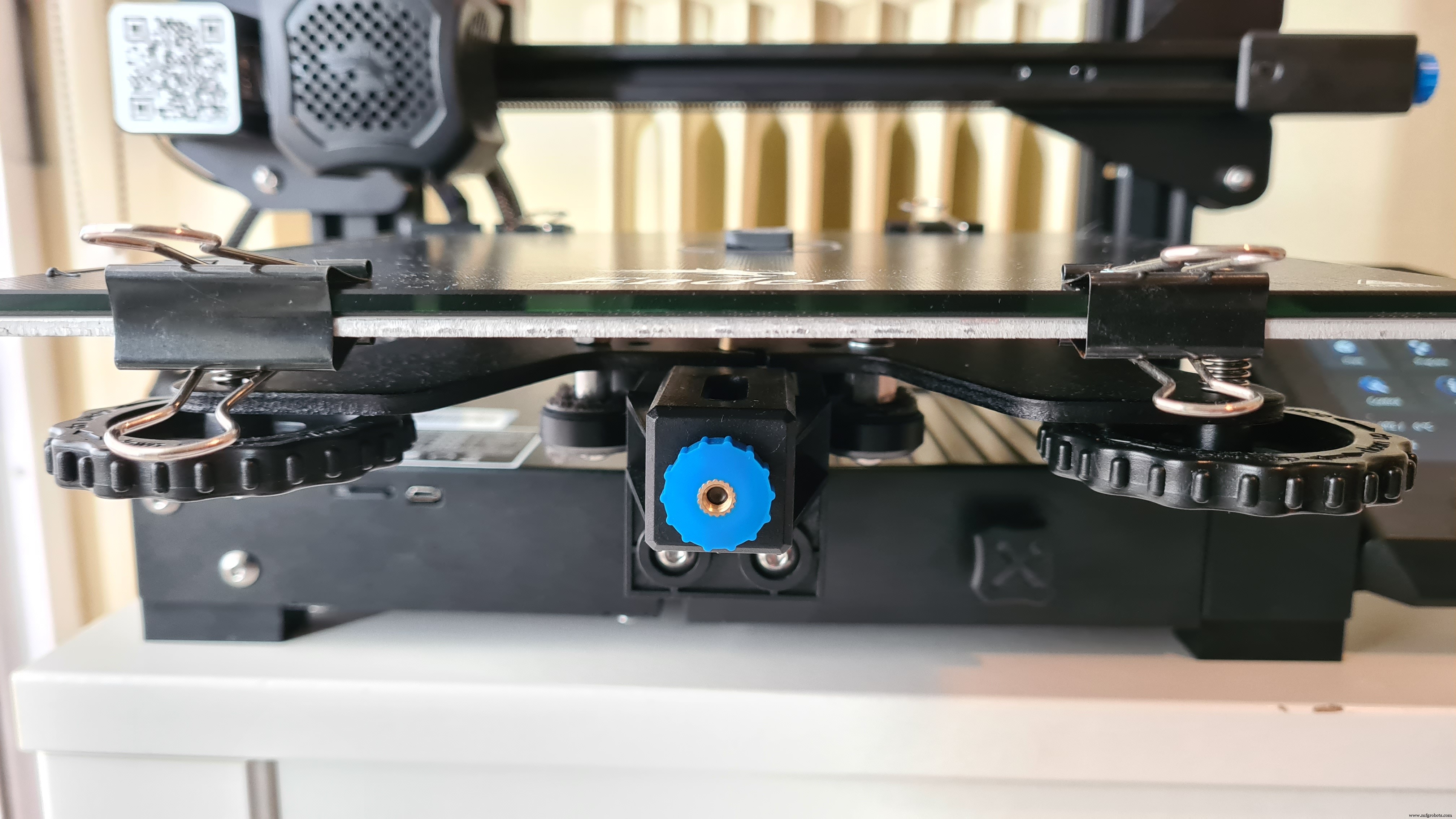
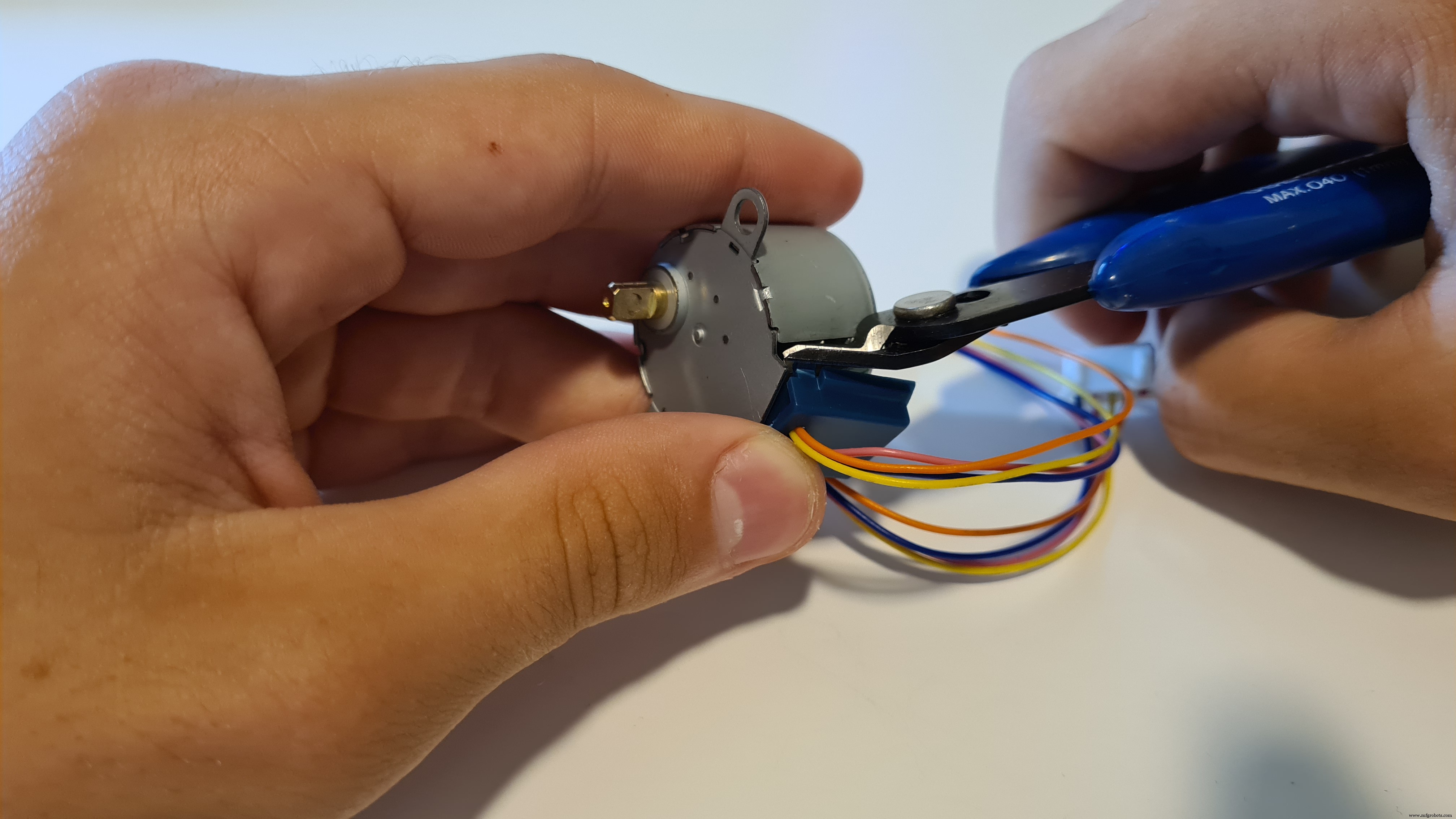
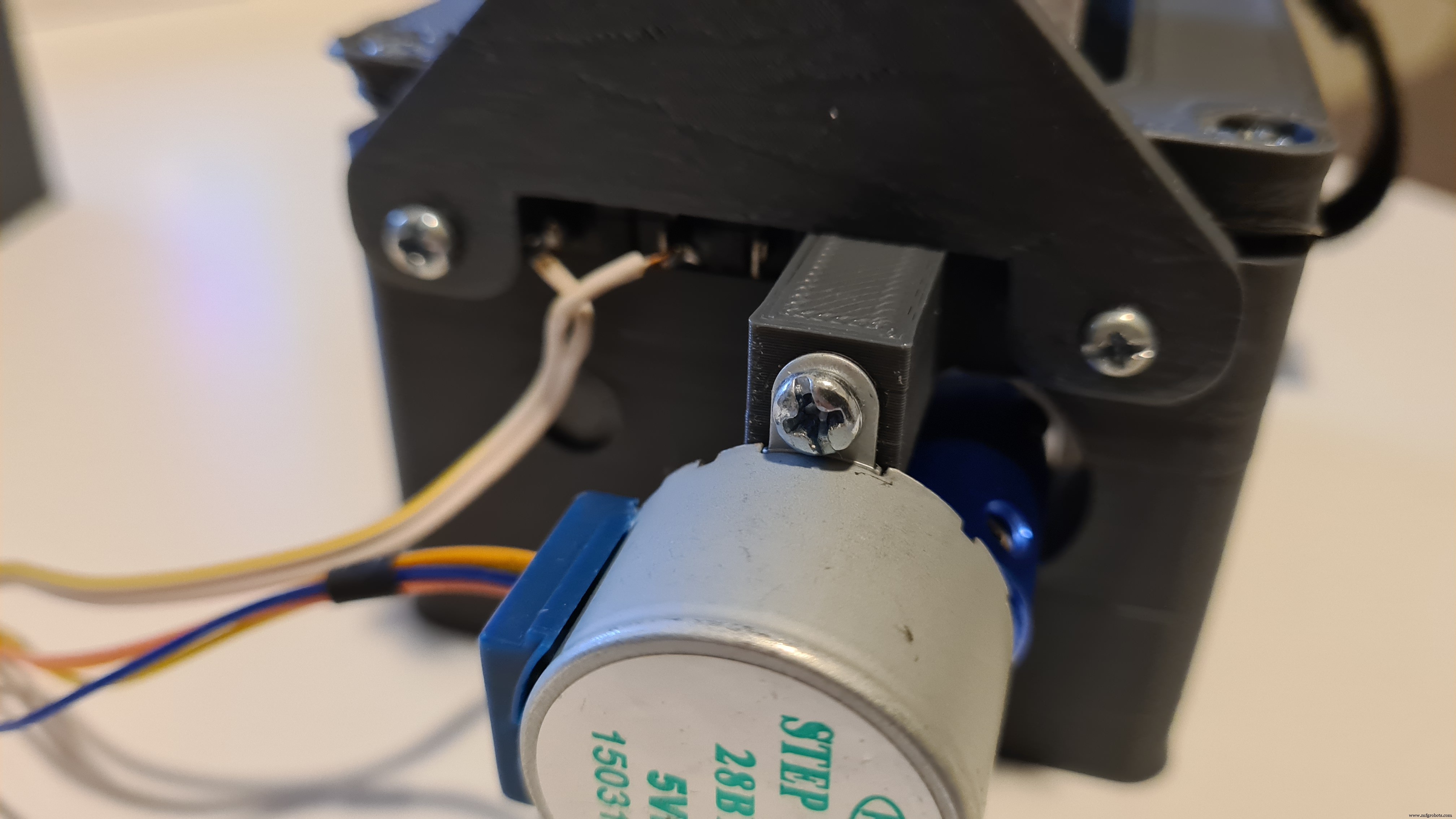
Шаг 6:модификация степпера

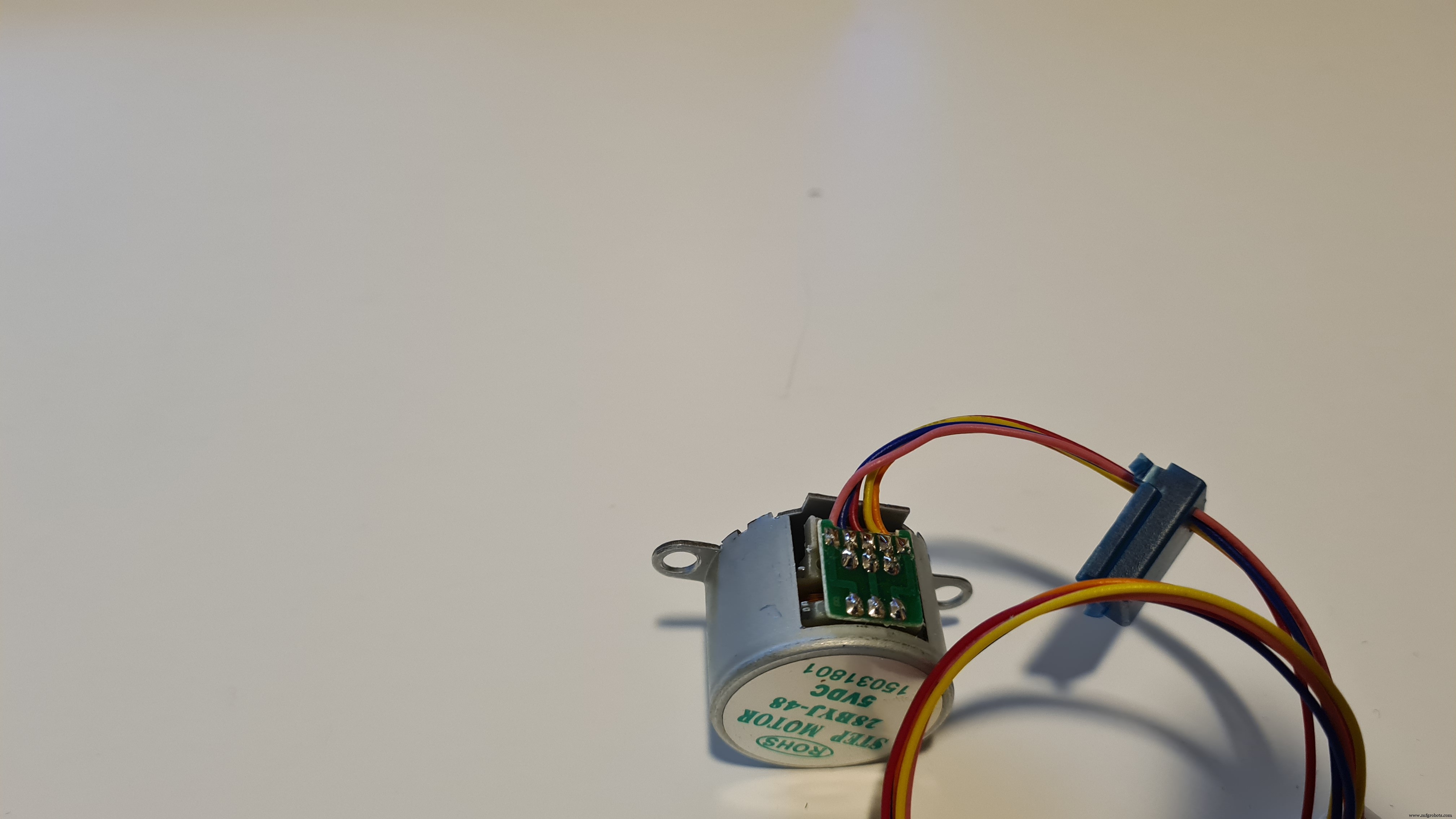
Шаговый двигатель 28BYJ-48 - это небольшой и действительно дешевый шаговый двигатель. Это униполярный шаговый двигатель с крутящим моментом около 300 г / см . который работает с нашим проектом, но я хочу, чтобы он был сильнее для лучших результатов. Мы можем увеличить крутящий момент до 800+ г / см путем преобразования это к биполярному мотор с простым и легким модом!
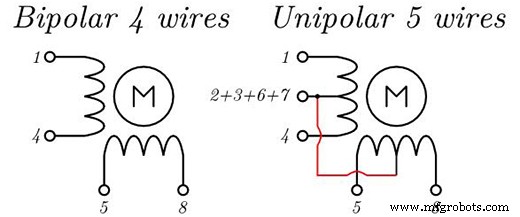
Биполярные шаговые двигатели имеют большие катушки и, как следствие, гораздо больший крутящий момент . .

Во-первых, вы хотите снять синюю крышку с помощью отвертки.
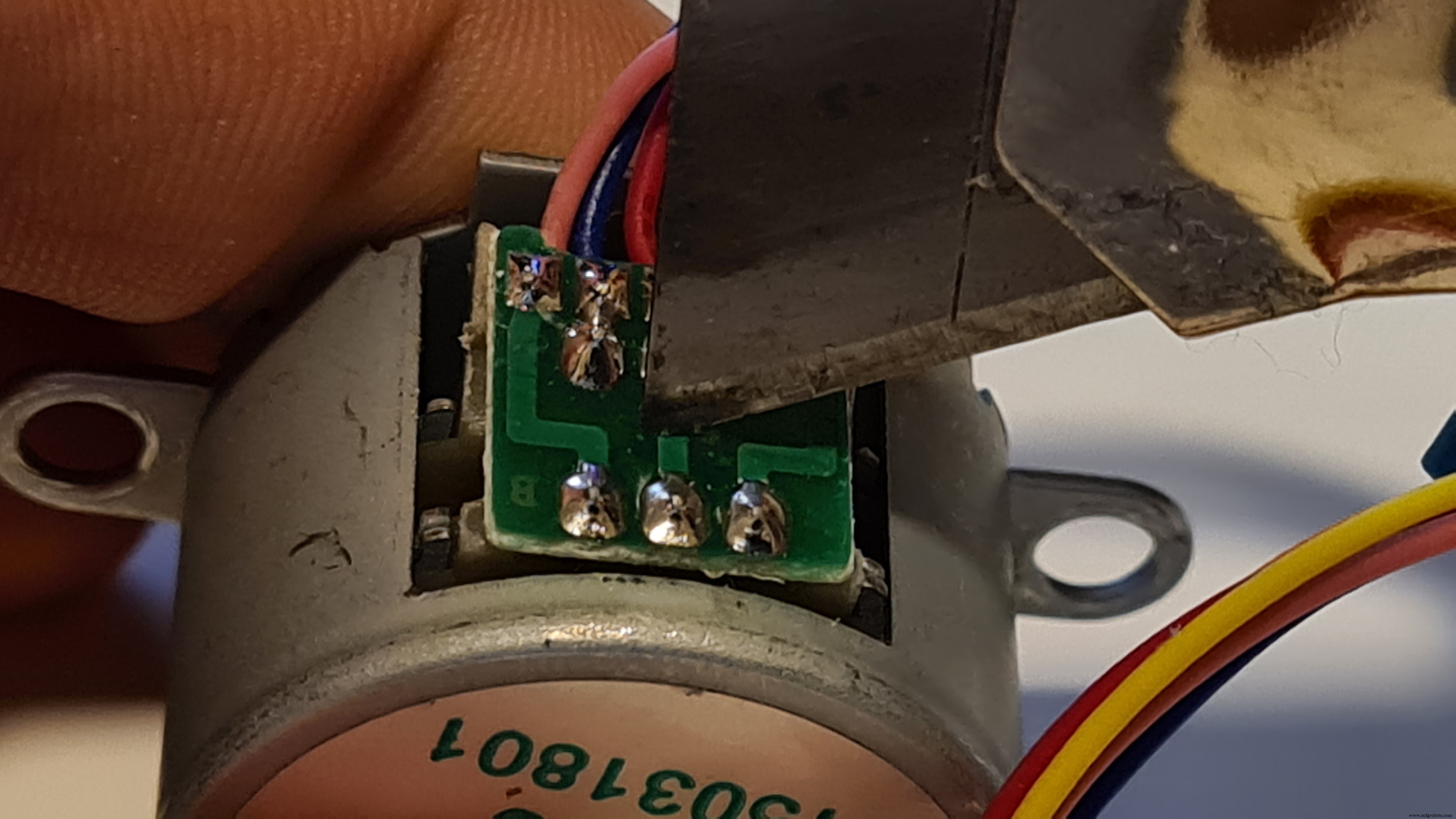
После удаления вы хотите полностью отрезать ножом средний след, ведущий к красному проводу.
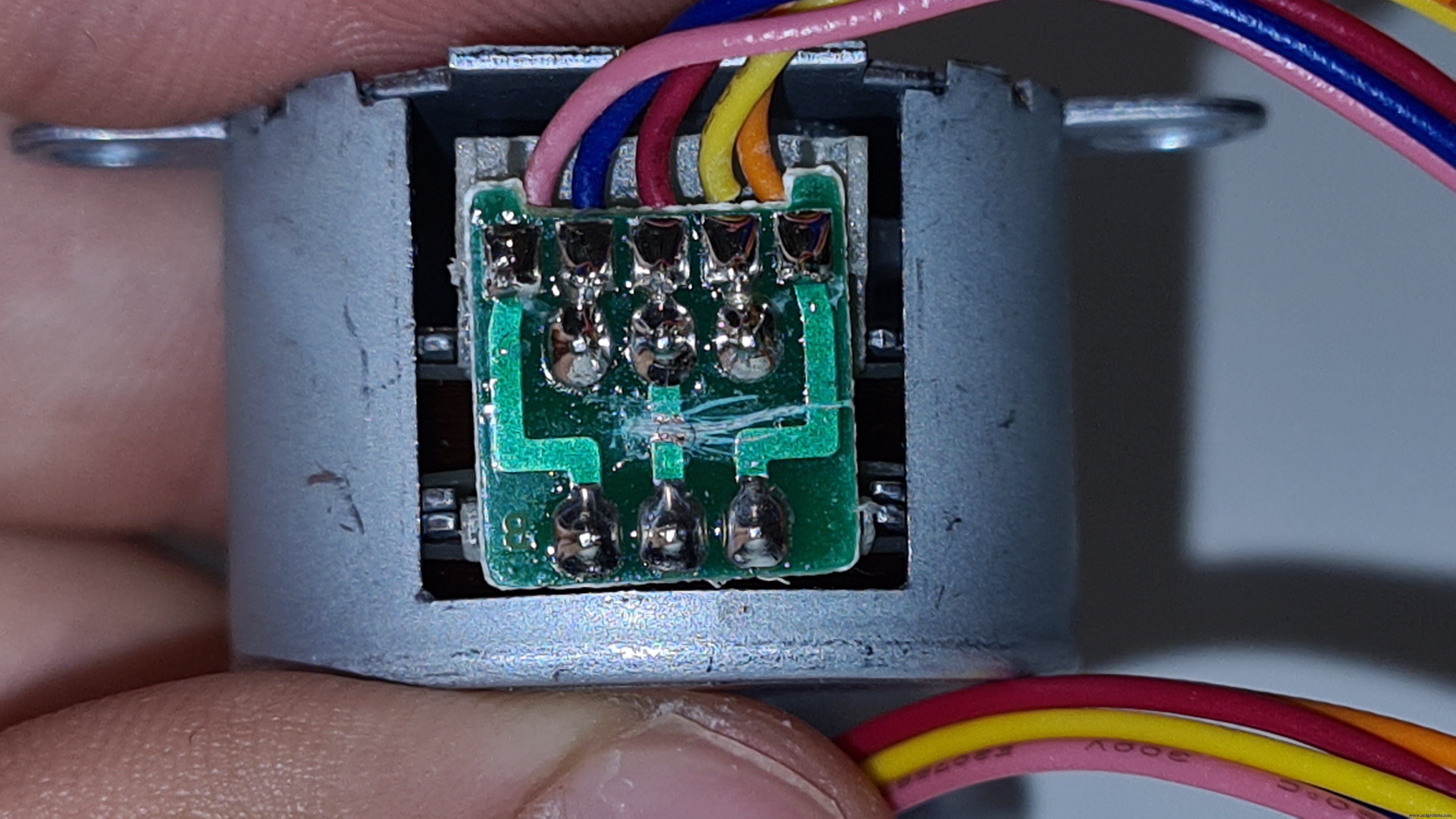
Вы хотите убедиться, что нет больше не подключаться.
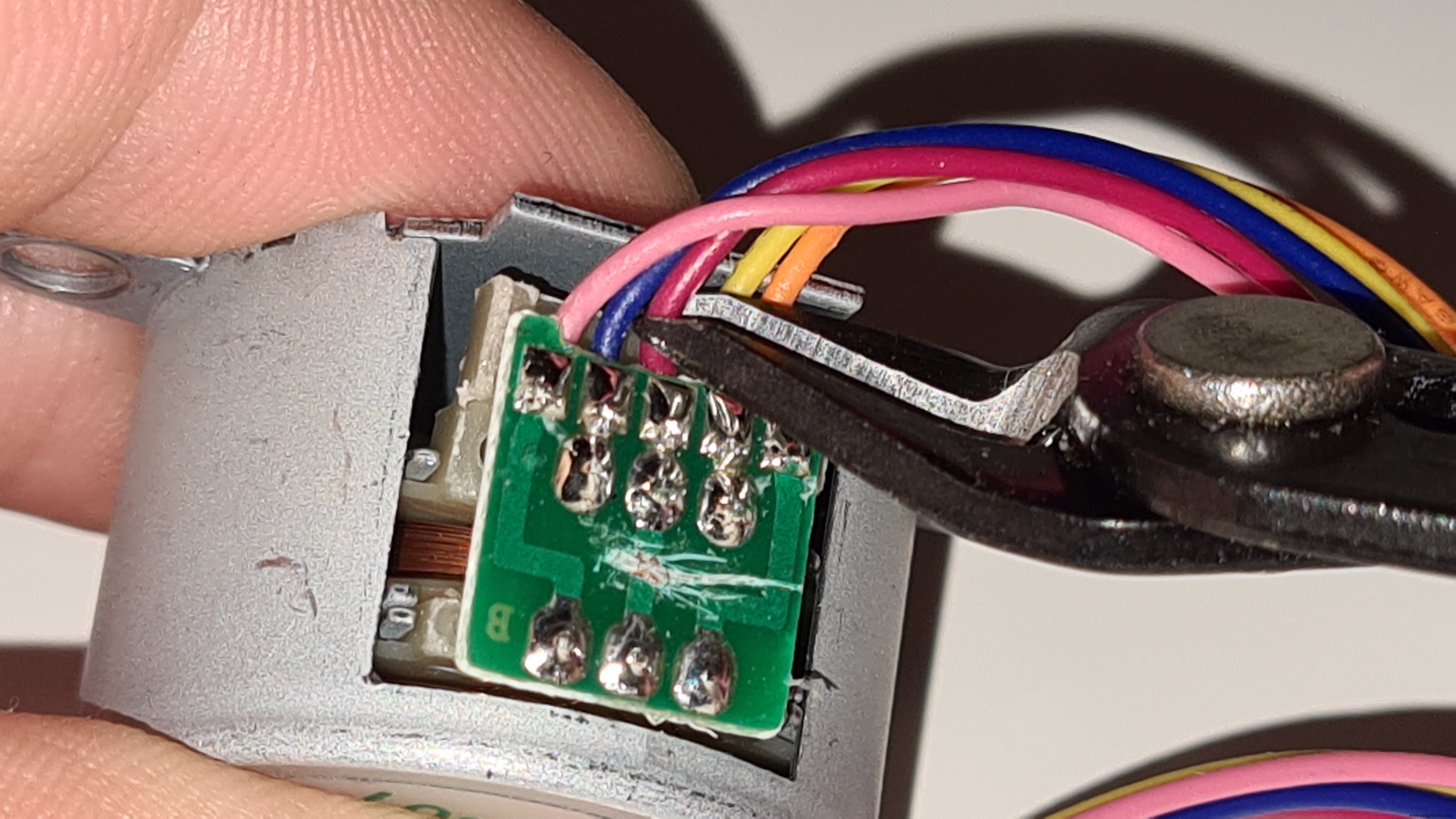
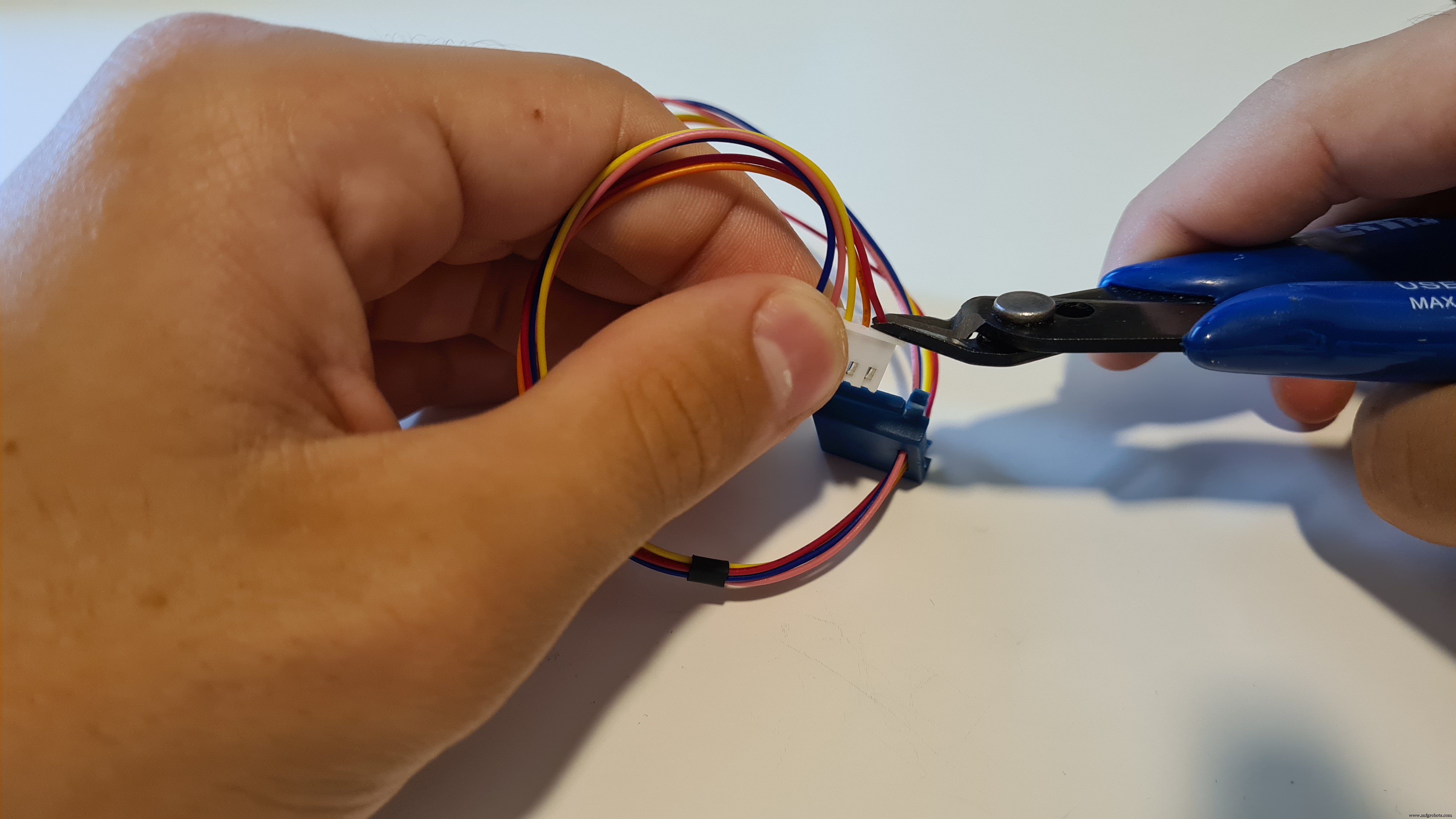
Теперь можно отрезать красный провод с обеих сторон.
Теперь вы можете снова прикрепить синюю крышку. Мне нужно было отрезать две его опоры, чтобы можно было поставить обратно.
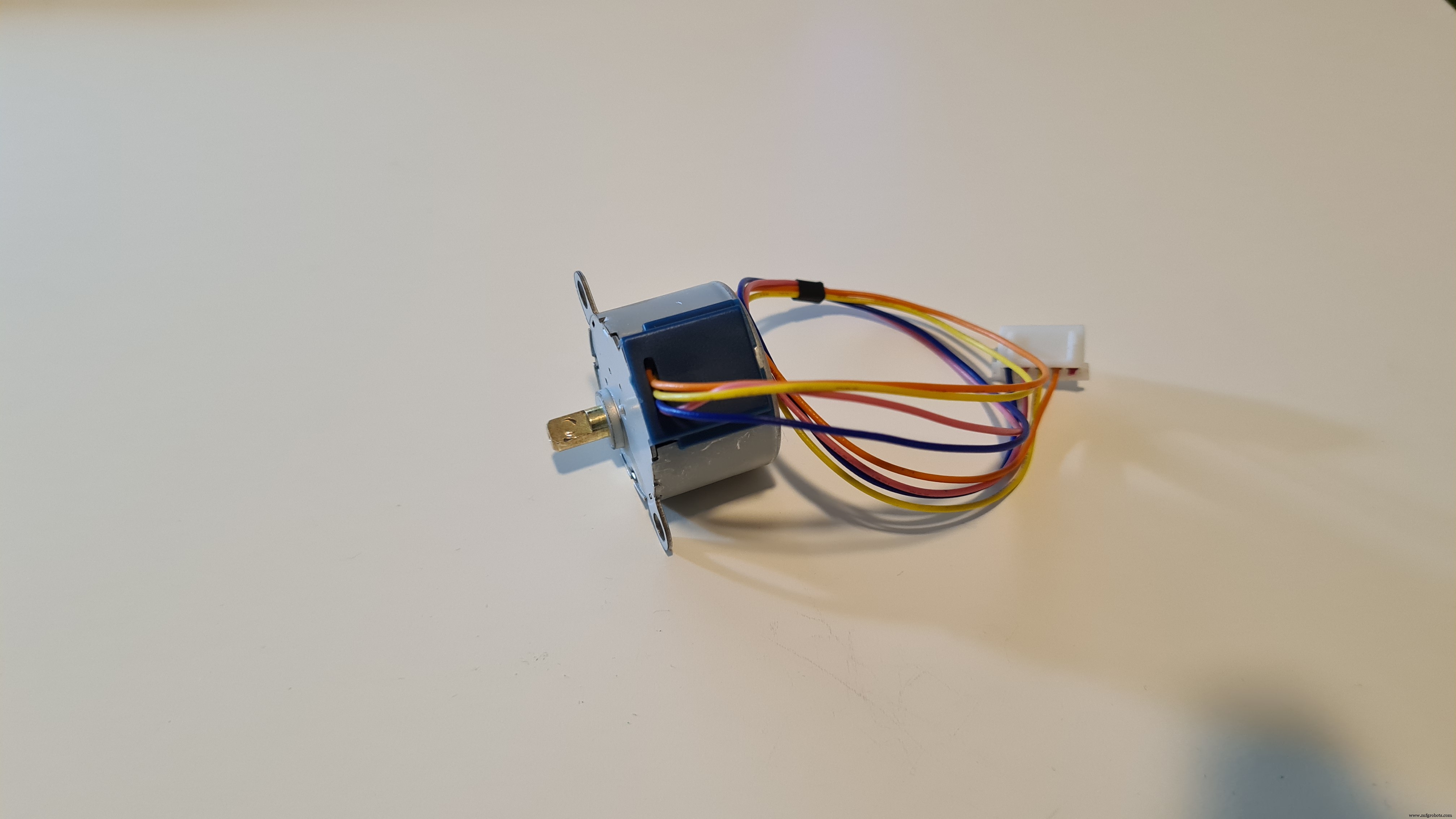
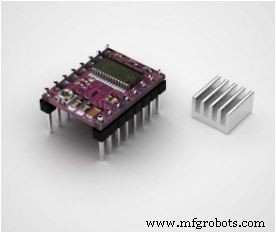
Теперь у вас есть собственный биполярный степпер 28BYJ-48. Его крутящий момент примерно в 2,5 раза превышает начальный крутящий момент. Однако теперь вам понадобится биполярный шаговый драйвер, такой как DRV8825, который я использую. Минимальное напряжение питания для драйвера составляет 8,4 В, а нашего двигателя - 5 В. Но не волнуйтесь, биполярная версия двигателя легко справится с таким напряжением!
Шаг 7:завязки-липучки своими руками x2

Пришло время сделать завязки-липучки, которыми аксессуар будет крепиться к диспенсеру. Если у вас уже есть кабельные стяжки на липучках, не стесняйтесь их использовать.

Вы можете сделать их сколь угодно длинными или короткими, но я бы посоветовал отрезать одну часть на 30–40 см, а другую - на 4–7 см.

Теперь вы хотите скрепить две части вместе. Убедитесь, что стороны, которые будут сшиваться вместе, грубые или обе мягкие.
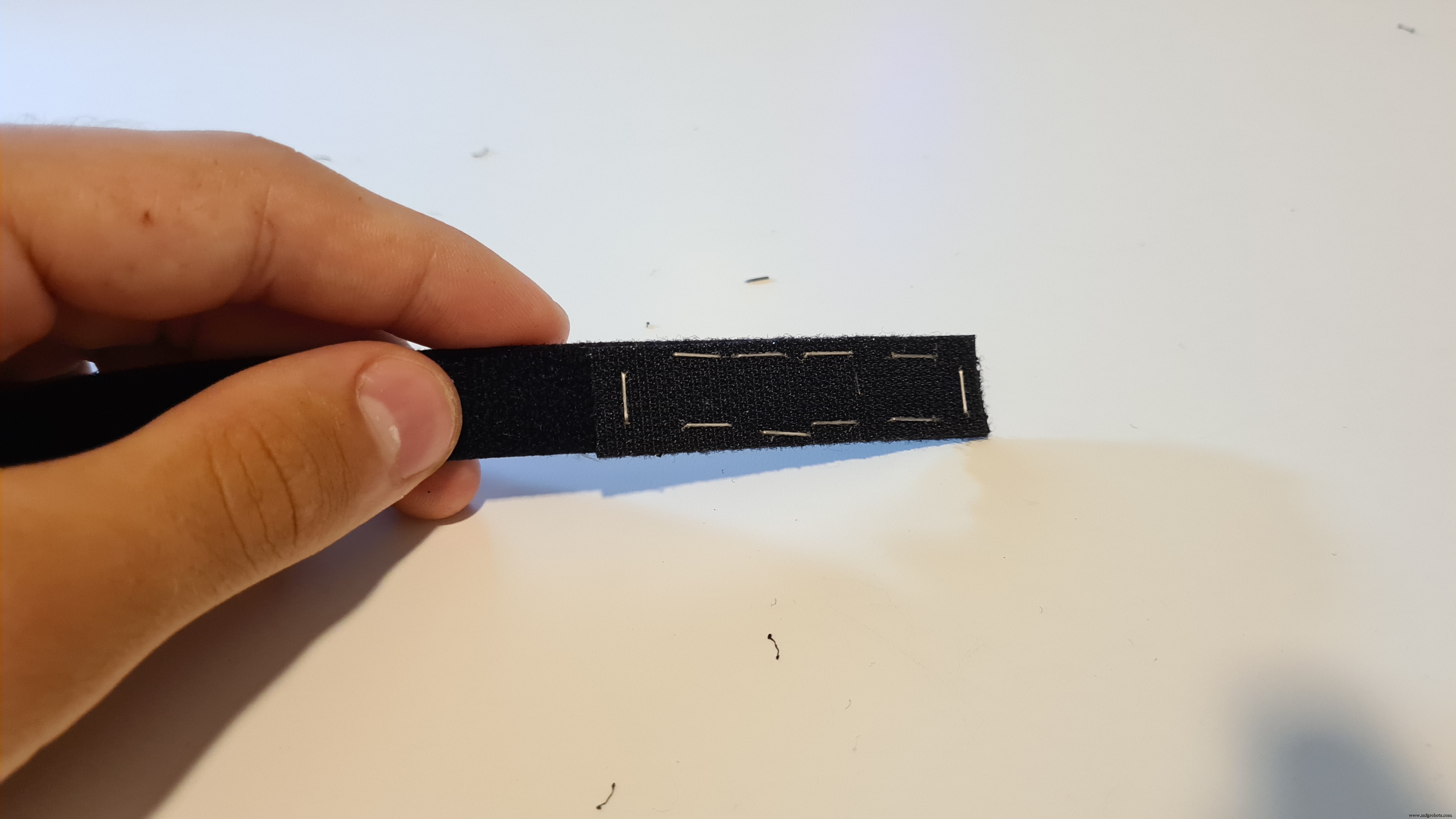
Теперь ваш галстук-липучка готов к использованию!


Вам понадобятся два таких штуки.
Шаг 8:Схема
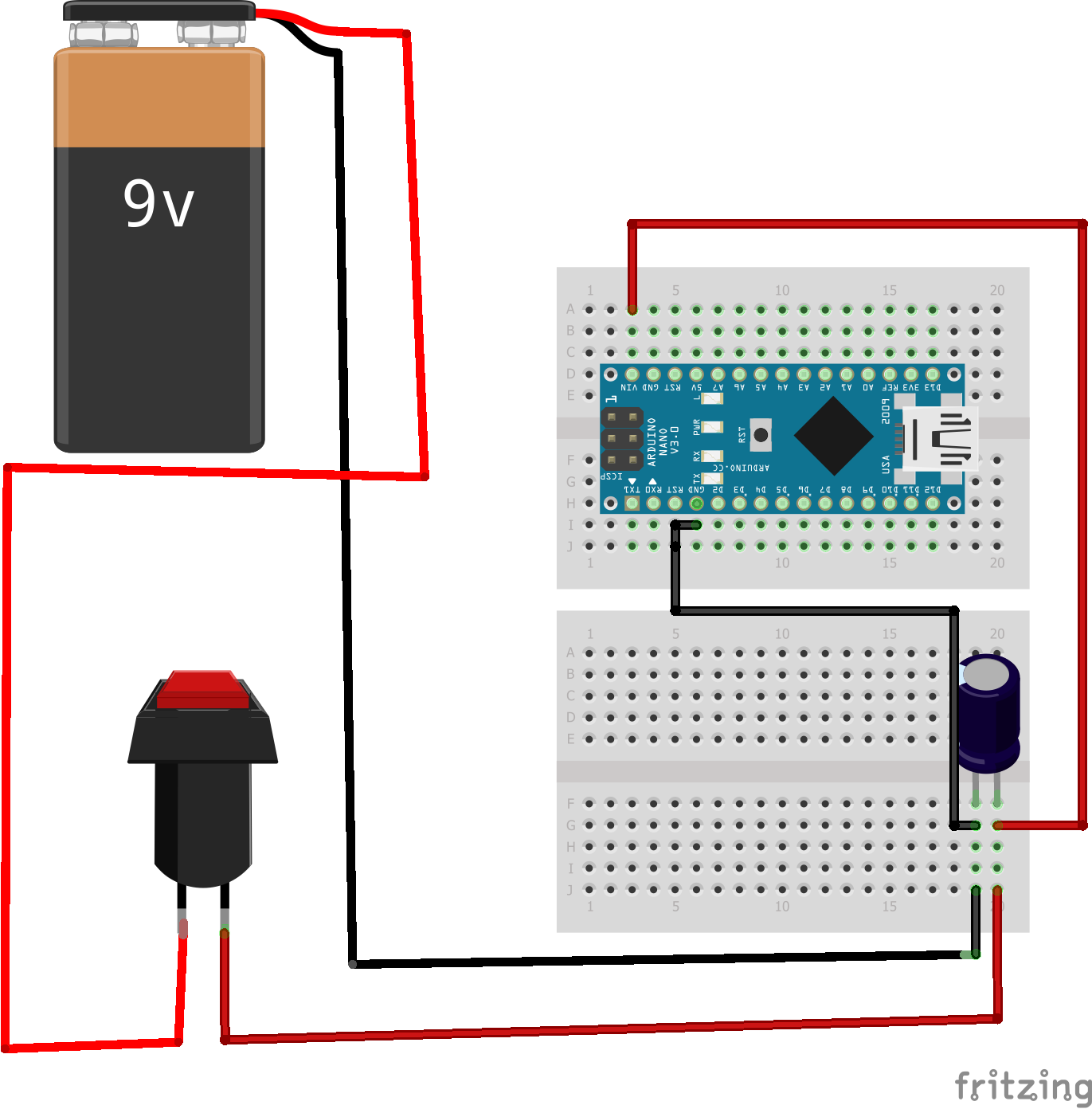
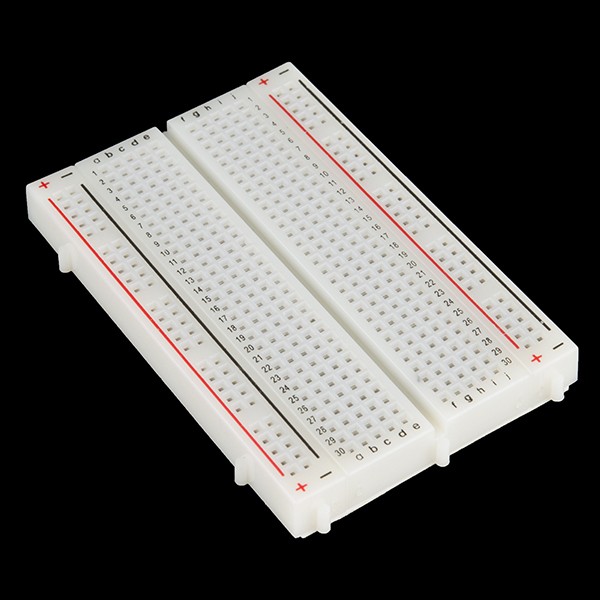
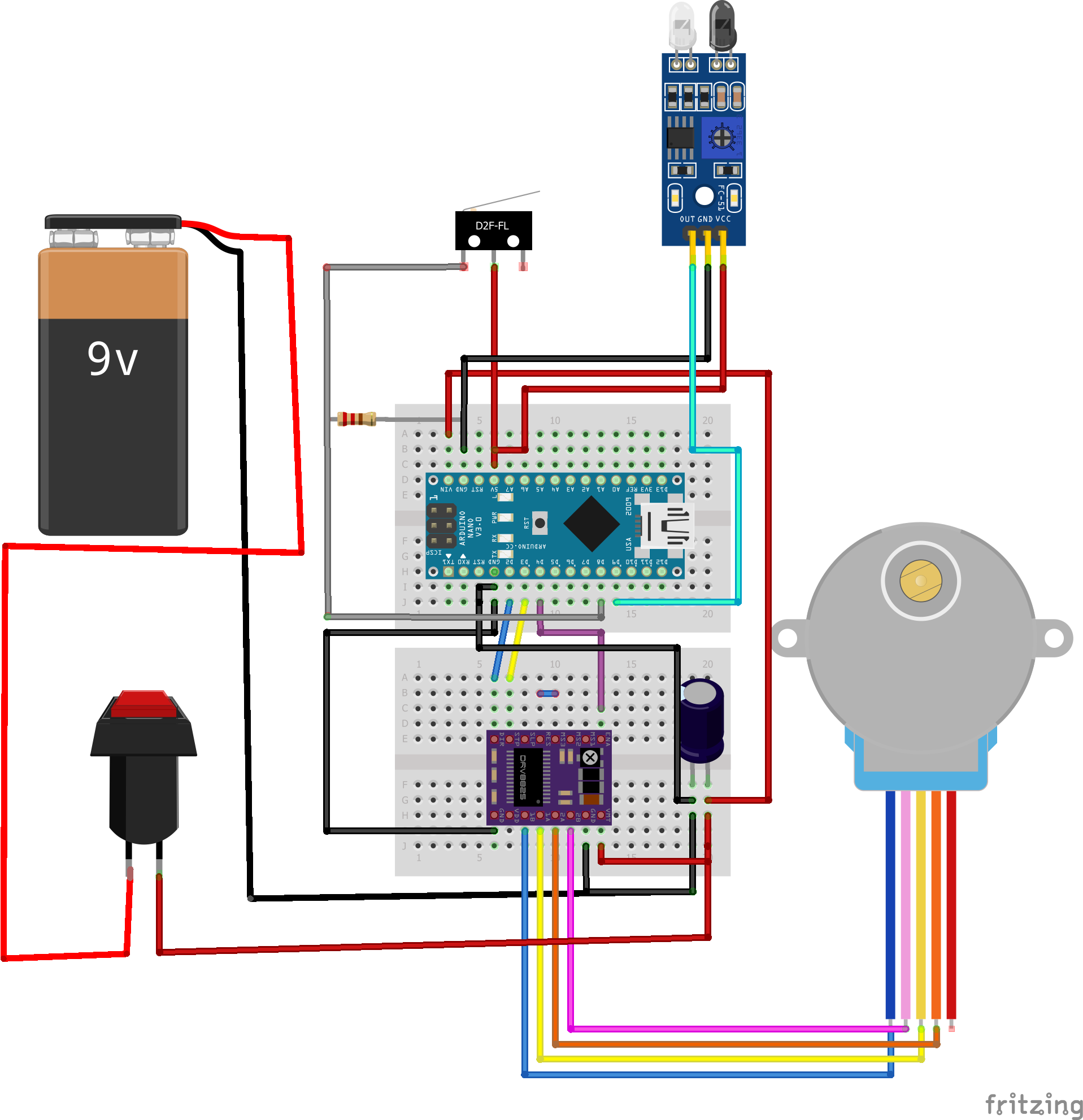
Пришло время создать схему электроники! Для начала подключите заземление батареи 9 В к земле Arduino с электролитическим конденсатором 100 мкФ между ними (помните, что сторона конденсатора с белой линией - это земля / катод). Подключите 9 В к общему выключателю, а затем к Vin на аноде конденсатора. Я использую две мини-макеты, потому что они хорошо помещаются в корпусе, используйте любую макетную плату, которая вам нравится, но с учетом ограниченного пространства.
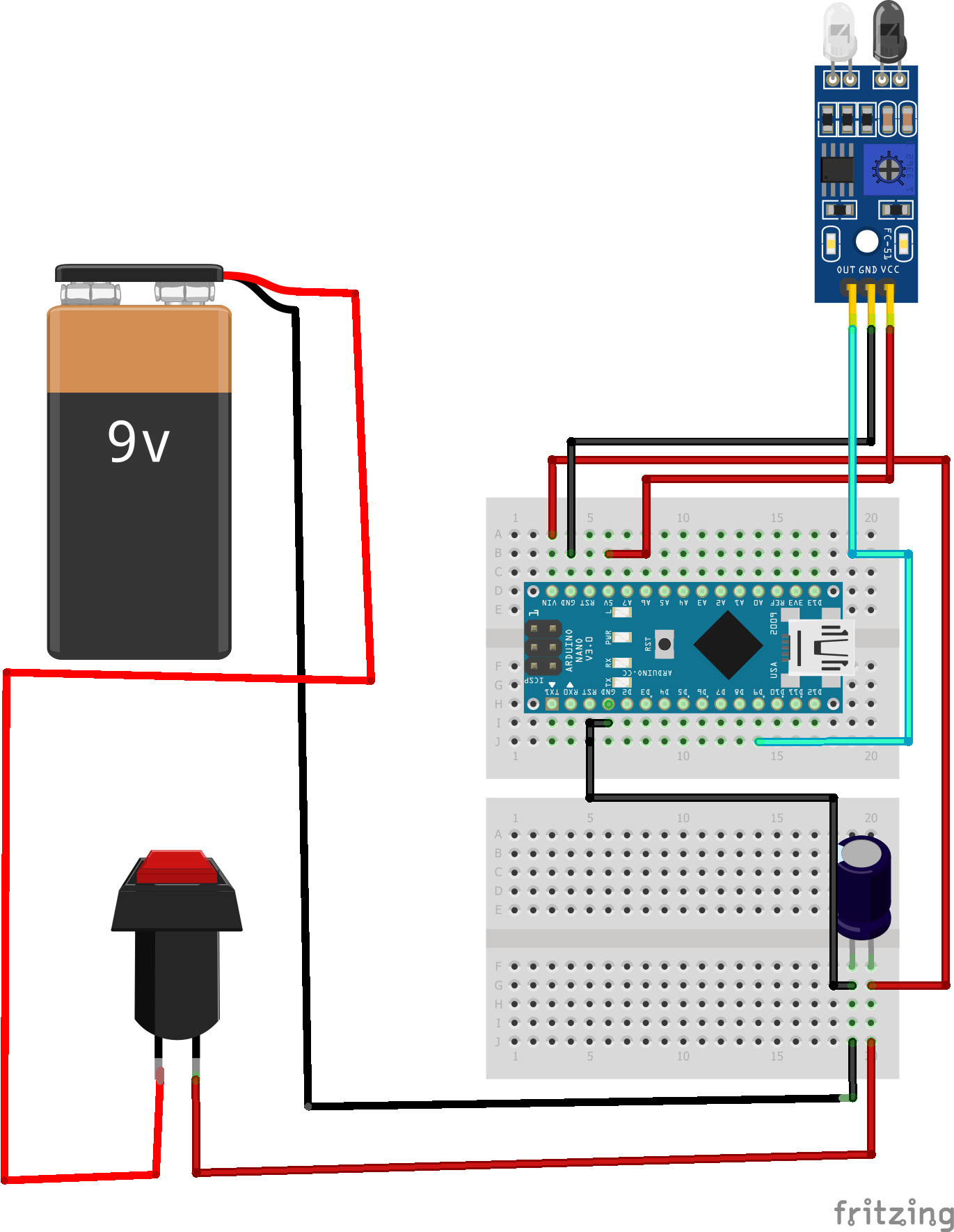
Подключите ИК-датчик препятствий VCC к 5 В, заземлению и, наконец, OUT к цифровому контакту 9.

Теперь подключим концевой выключатель. Подключите общий вывод к 5 В, а нормально открытый - к цифровому выводу 8 и к земле через резистор 1 кОм.
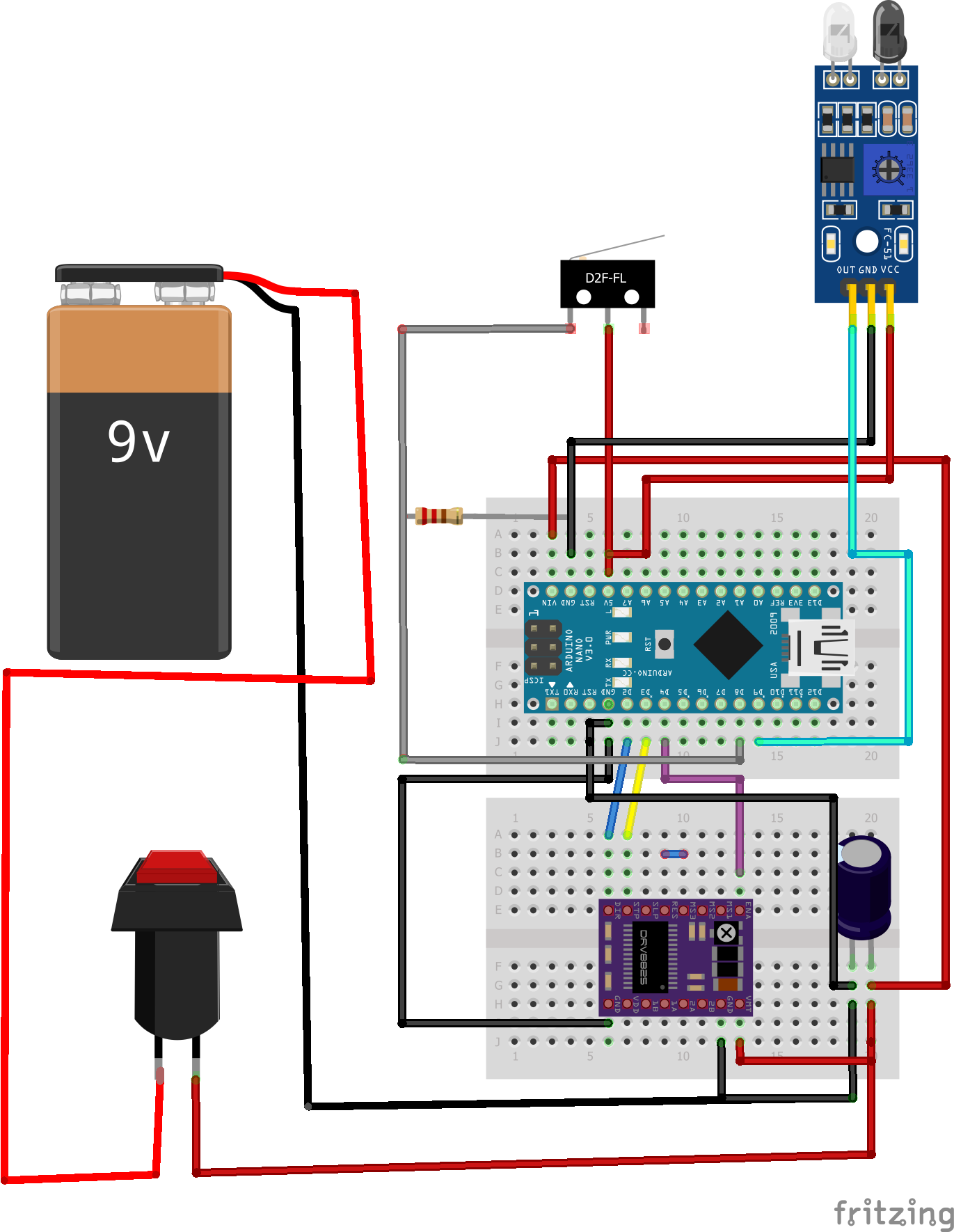
Добавьте биполярный драйвер двигателя DRV8825 на макетную плату. Подключите Vmot к Vin Arduino. Подключите два заземления к заземлению. Подключите вывод Dir к цифровому выводу 2, вывод Step к цифровому выводу 3, вывод включения к цифровому выводу 4. Соедините выводы Reset и Sleep друг с другом.
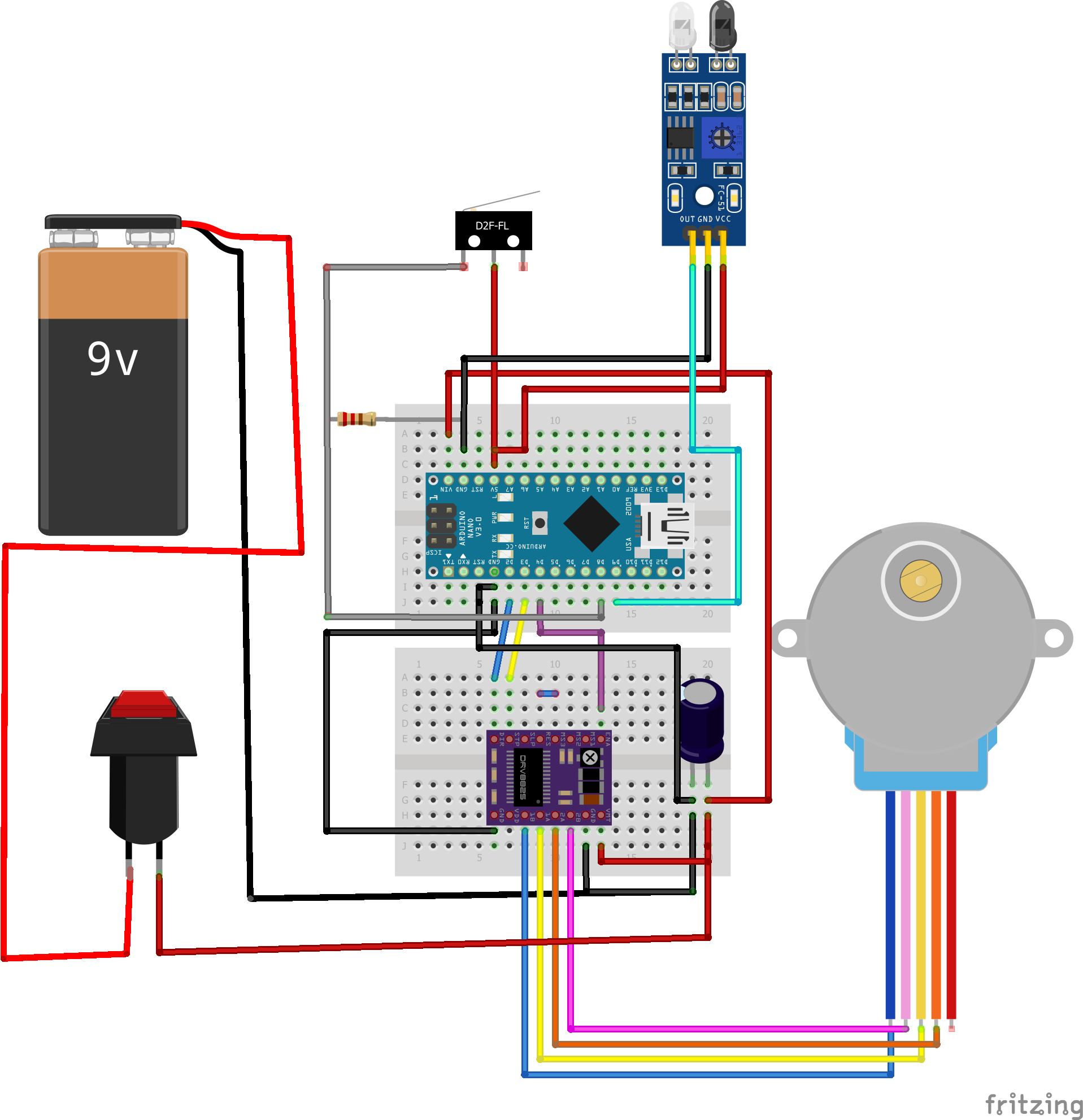
Наконец, подключите синий кабель 28BYJ-48 к A2, желтый кабель к A1, оранжевый кабель к B1 и розовый кабель к B2.
Наконец-то подключена электроника!
Шаг 9:Программирование
const int dirPin =2; Мы определяем вывод Dir драйвера как цифровой вывод 2.
const int stepPin =3; Мы определяем вывод Step драйвера как цифровой вывод 3
const int enablePin =4; Мы определяем вывод Enable драйвера как цифровой вывод 4.
const int stepsPerRevolution =6000; Мы определяем количество шагов на оборот как 6000, один оборот на 360 градусов составляет 2048 шагов.
int endStop =8; Мы определяем входной контакт переключателя endStop как цифровой контакт 8.
int irSensor =9; Мы определяем входной контакт ИК-датчика препятствий как цифровой контакт 9.
void setup ()
{
pinMode (endStop, INPUT);
pinMode (irSensor, INPUT); При настройке мы объявляем выводы endStop и irSensor как входы.
pinMode (stepPin, OUTPUT);
pinMode (dirPin, OUTPUT);
pinMode (enablePin, OUTPUT); Мы объявляем stepPin, dirPin и enablePin как выходные данные.
digitalWrite (enablePin, LOW); Мы устанавливаем enablePin LOW, чтобы включить драйвер DRV8825
while (digitalRead (endStop) ==LOW)
{ Пока цифровое значение переключателя endStop равно LOW (переключатель не нажат.)
digitalWrite (dirPin, HIGH); направление вращения двигателя установлено против часовой стрелки
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} и шаговый двигатель будет вращаться против часовой стрелки по одному шагу за раз, пока условие оператора While не станет ложным.
digitalWrite (enablePin, HIGH);
} Это отключает наш драйвер, поэтому, когда он не используется, он не потребляет много тока.
void loop ()
{
if (digitalRead (irSensor) ==0)
{ В петле, если цифровое значение irSensor равно 0 (есть препятствие (рука) перед ИК-датчиком препятствий)
digitalWrite (enablePin, LOW); Драйвер будет включен.
digitalWrite (dirPin, LOW); Направление вращения двигателя установлено по часовой стрелке.
for (int x =0; x
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} Шаговый двигатель будет вращаться по часовой стрелке на 6000 шагов.
задержка (2000); Он подождет 2 секунды.
while (digitalRead (endStop) ==LOW)
{ Пока цифровое значение переключателя endStop равно НИЗКОМ (переключатель не нажат.
digitalWrite (dirPin, HIGH); направление вращения двигателя установлено против часовой стрелки.
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
}
} и шаговый двигатель будет вращаться против часовой стрелки по одному шагу за раз, пока условие оператора While не станет ложным.
digitalWrite (enablePin, HIGH);
}
} Затем драйвер будет отключен до тех пор, пока условие оператора If не станет истинным и код не будет воспроизведен снова.
Шаг 10:Сборка
Сборка крышки


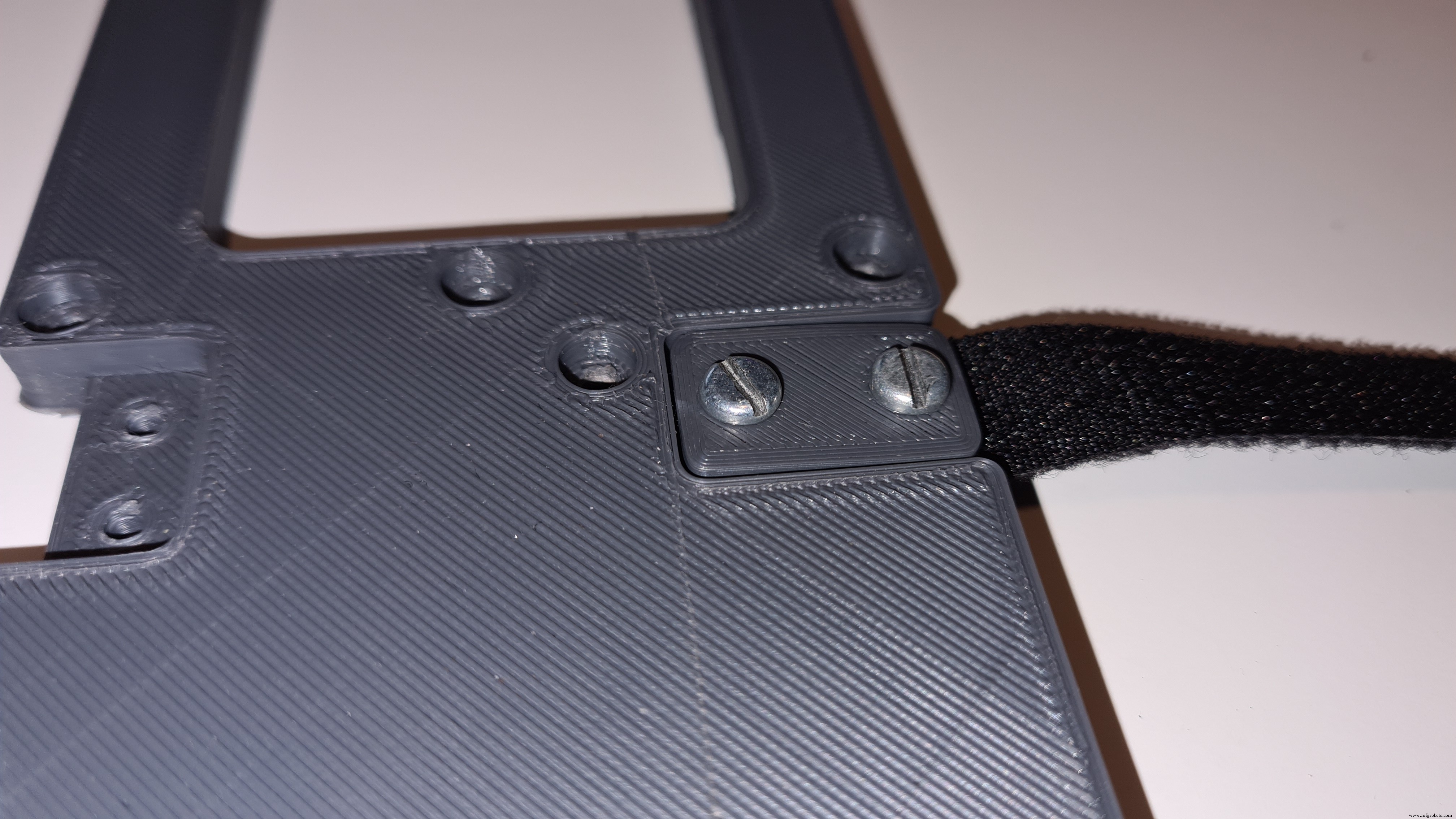

Просто вставьте стяжку-липучку в щель, добавьте на нее держатель и скрутите их.
x2


Прикрутите липучку к крышке. Сборка крышки завершена!
x2
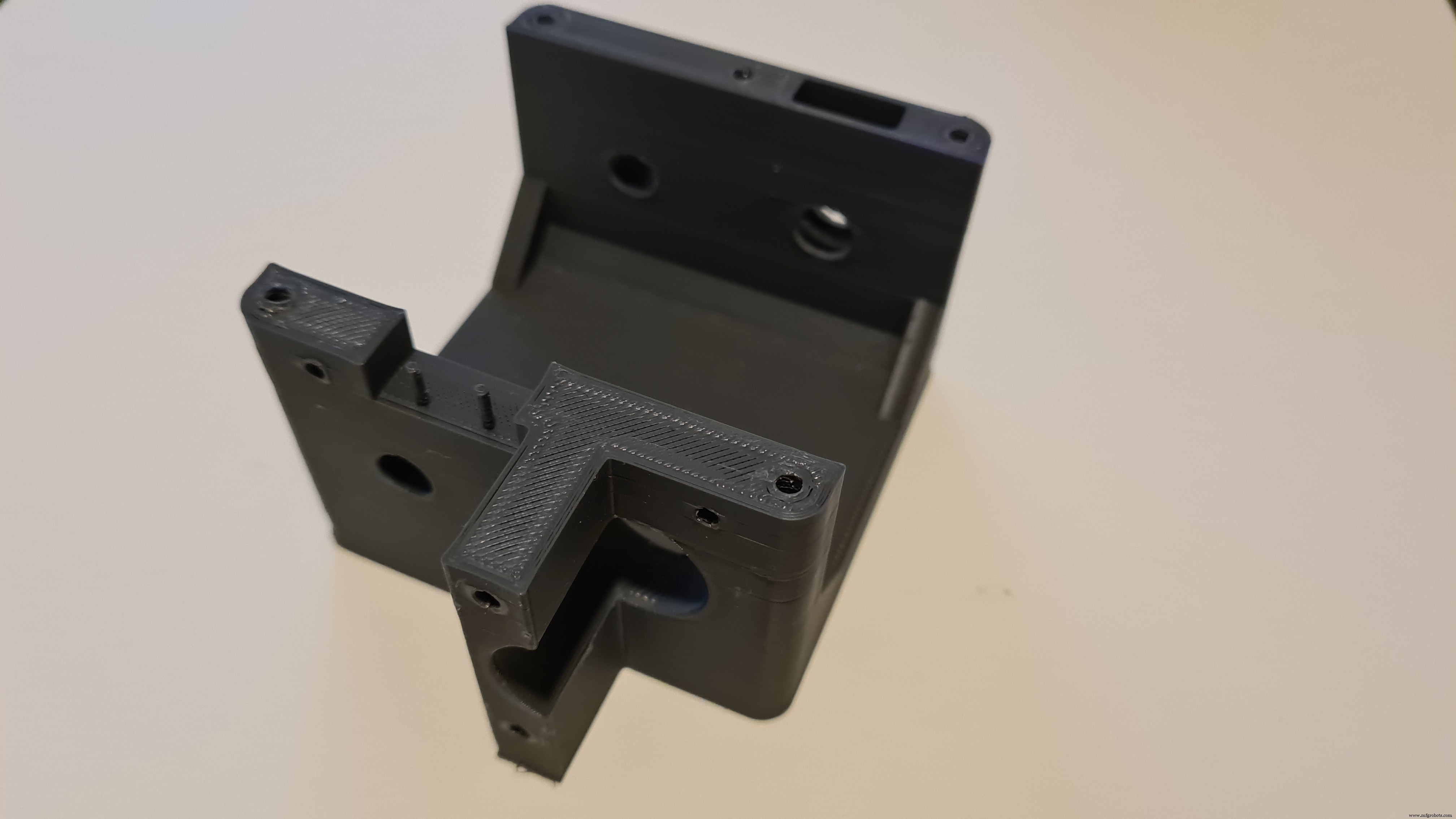
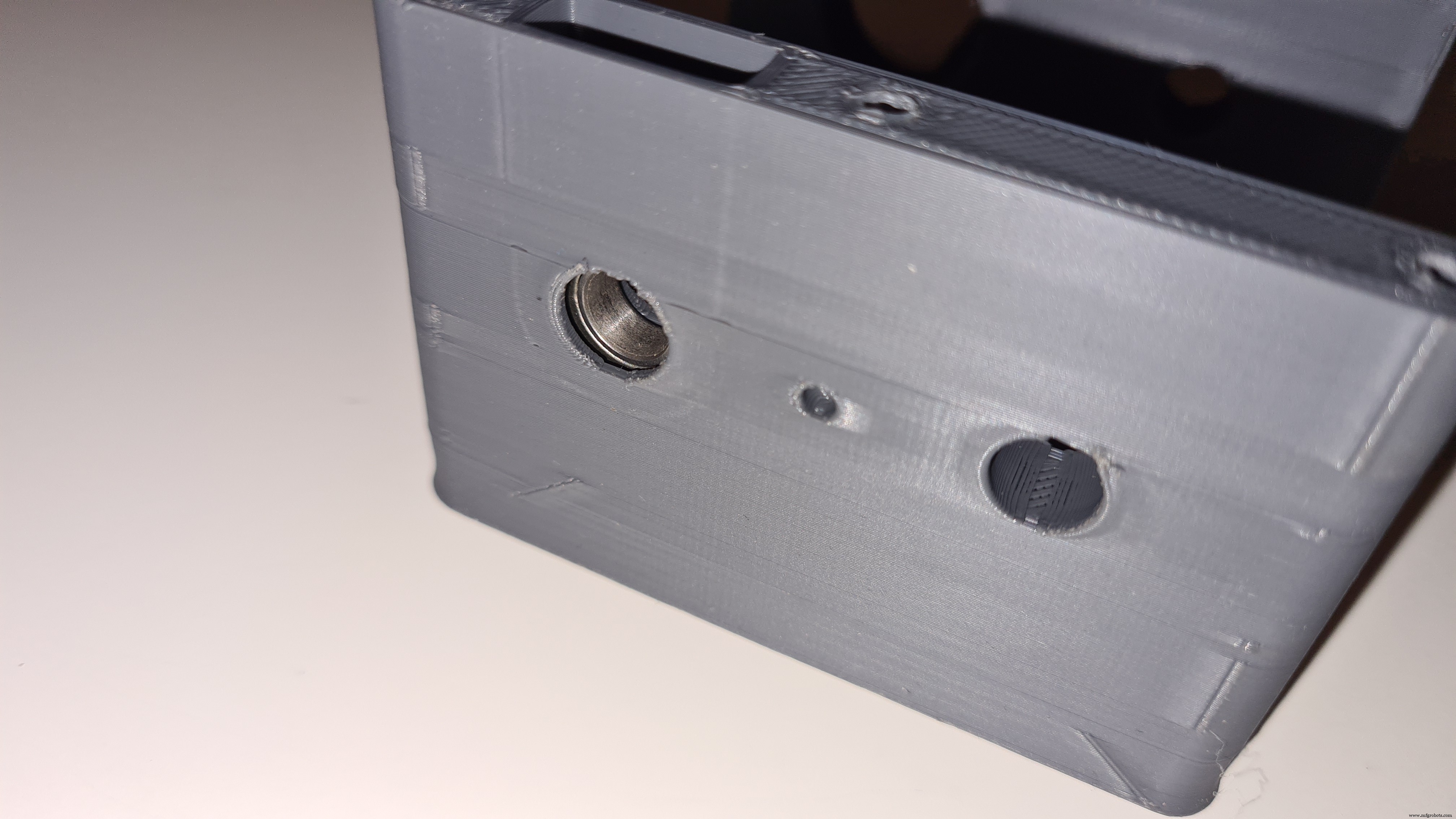
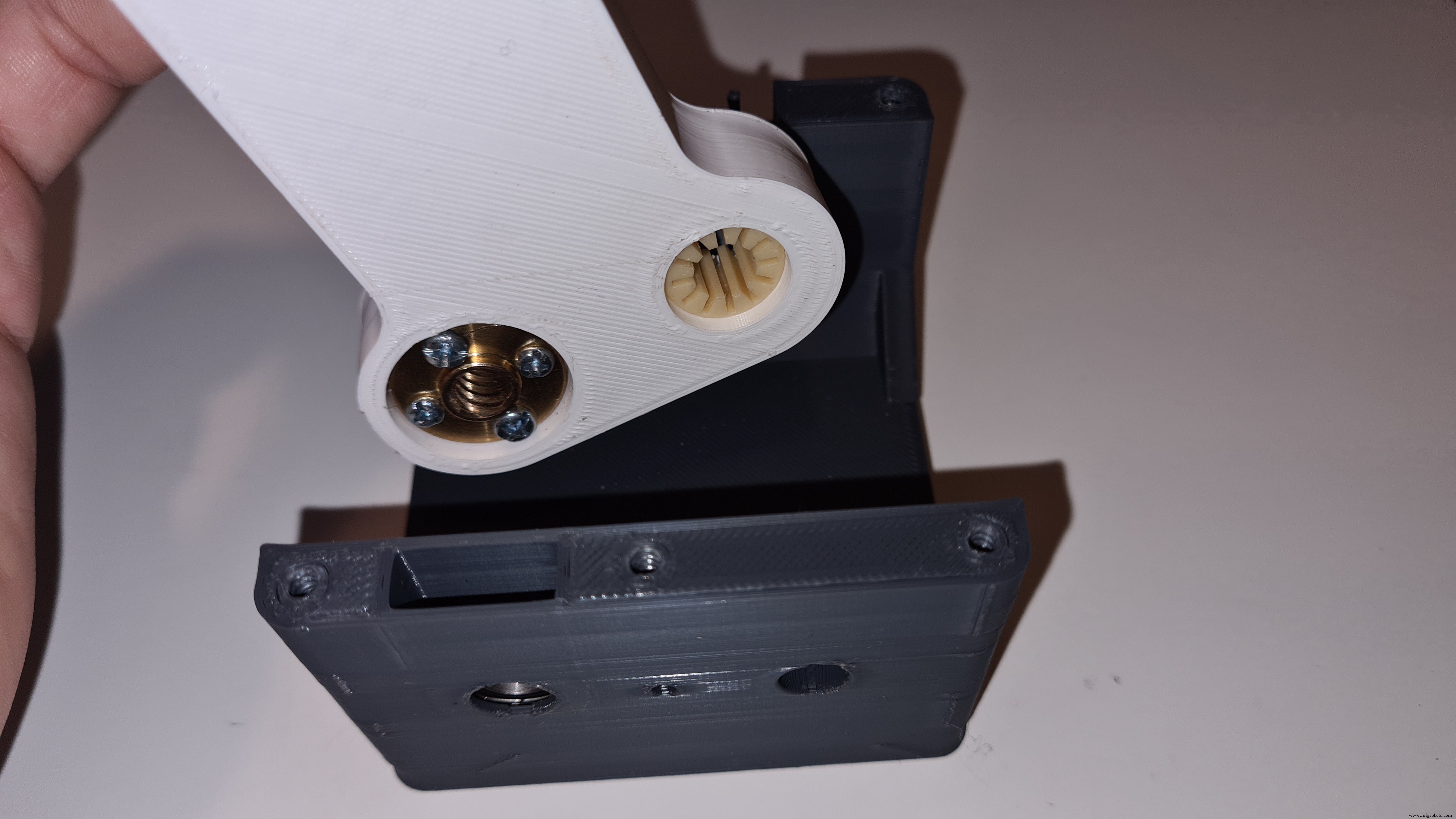
Прижимной узел

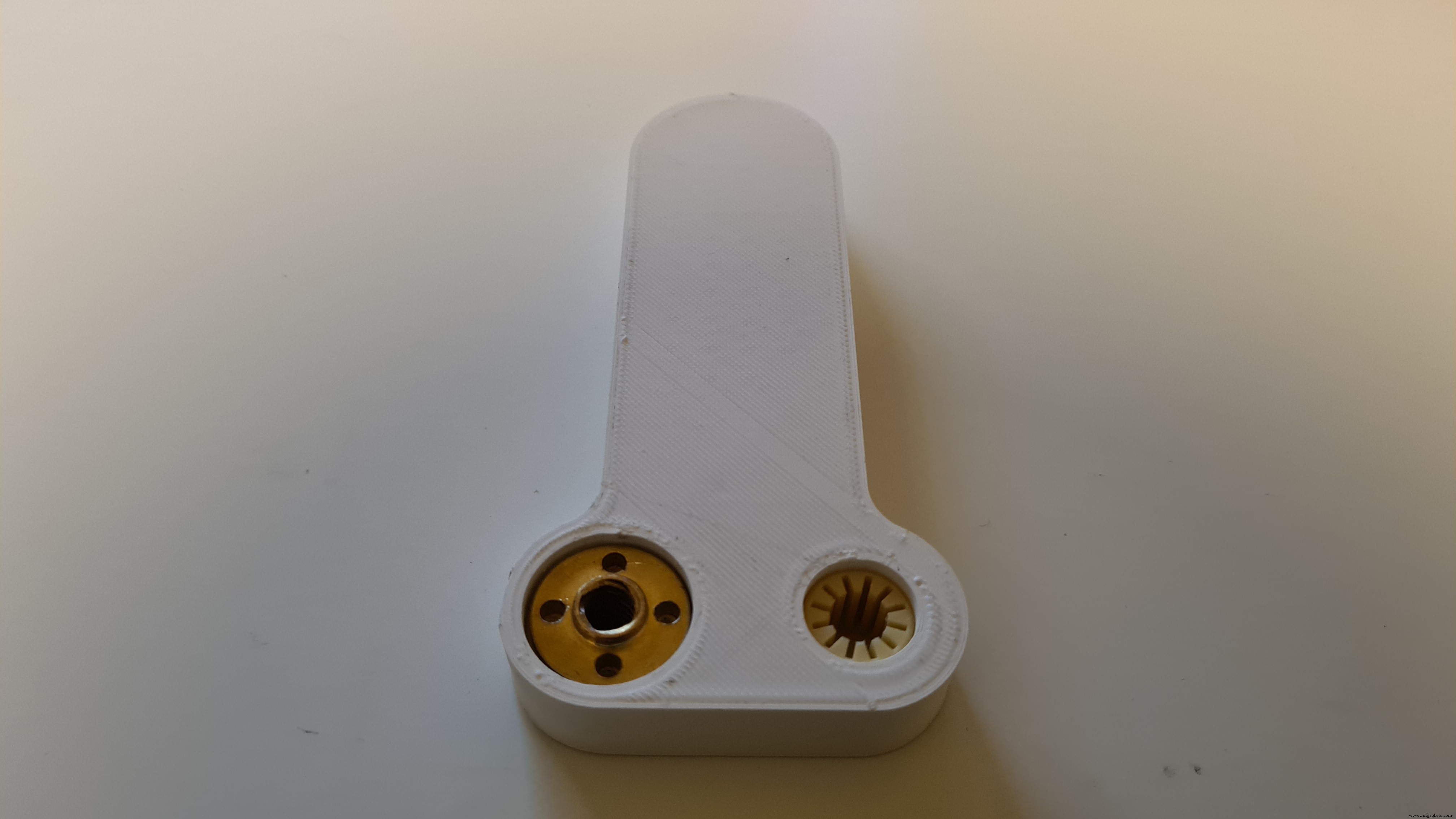

Вставьте линейный подшипник в правое отверстие до середины. Прикрутите гайку T8 к левому отверстию прижима 4 винтами.
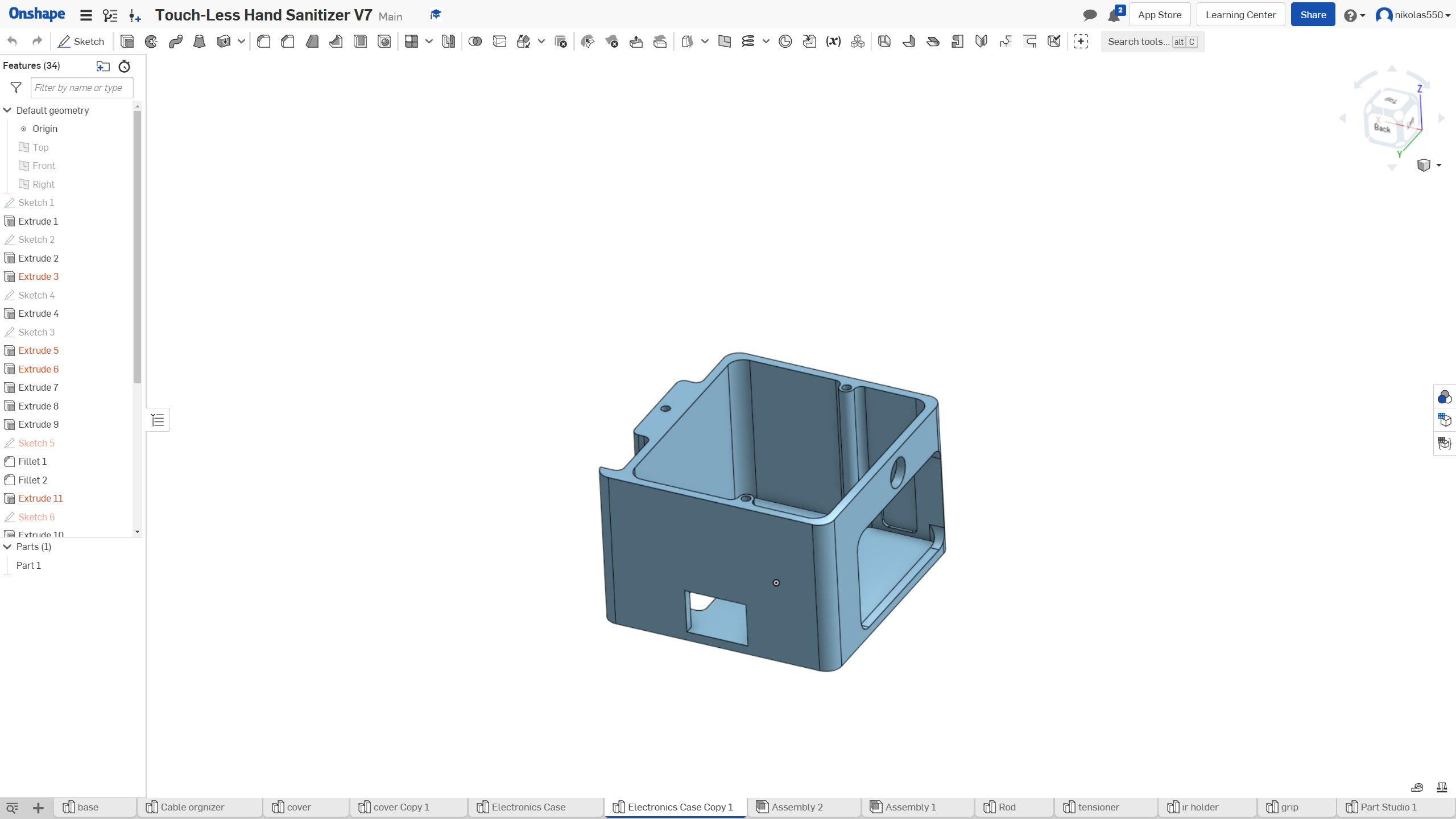
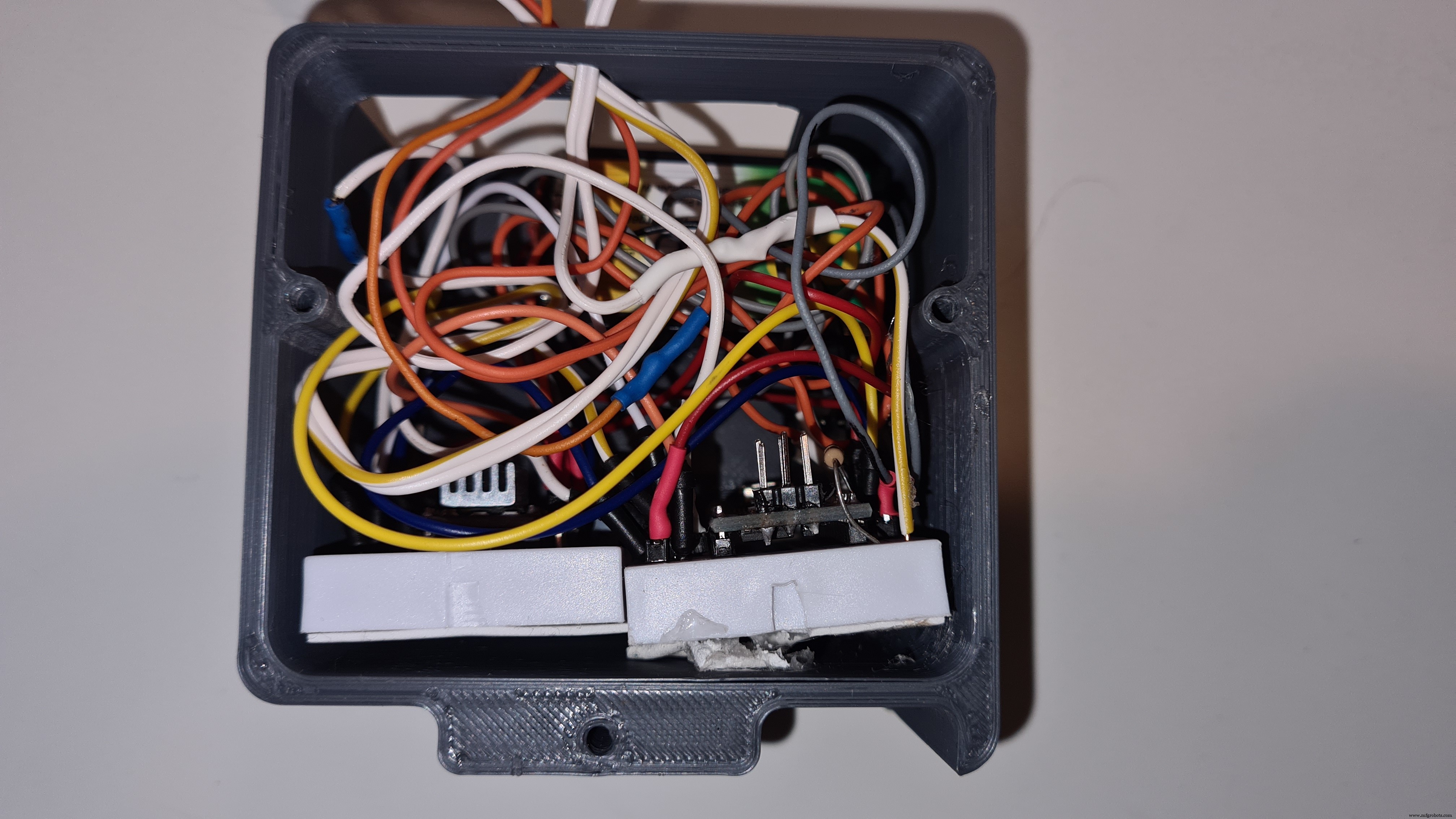
Сборка корпуса электроники
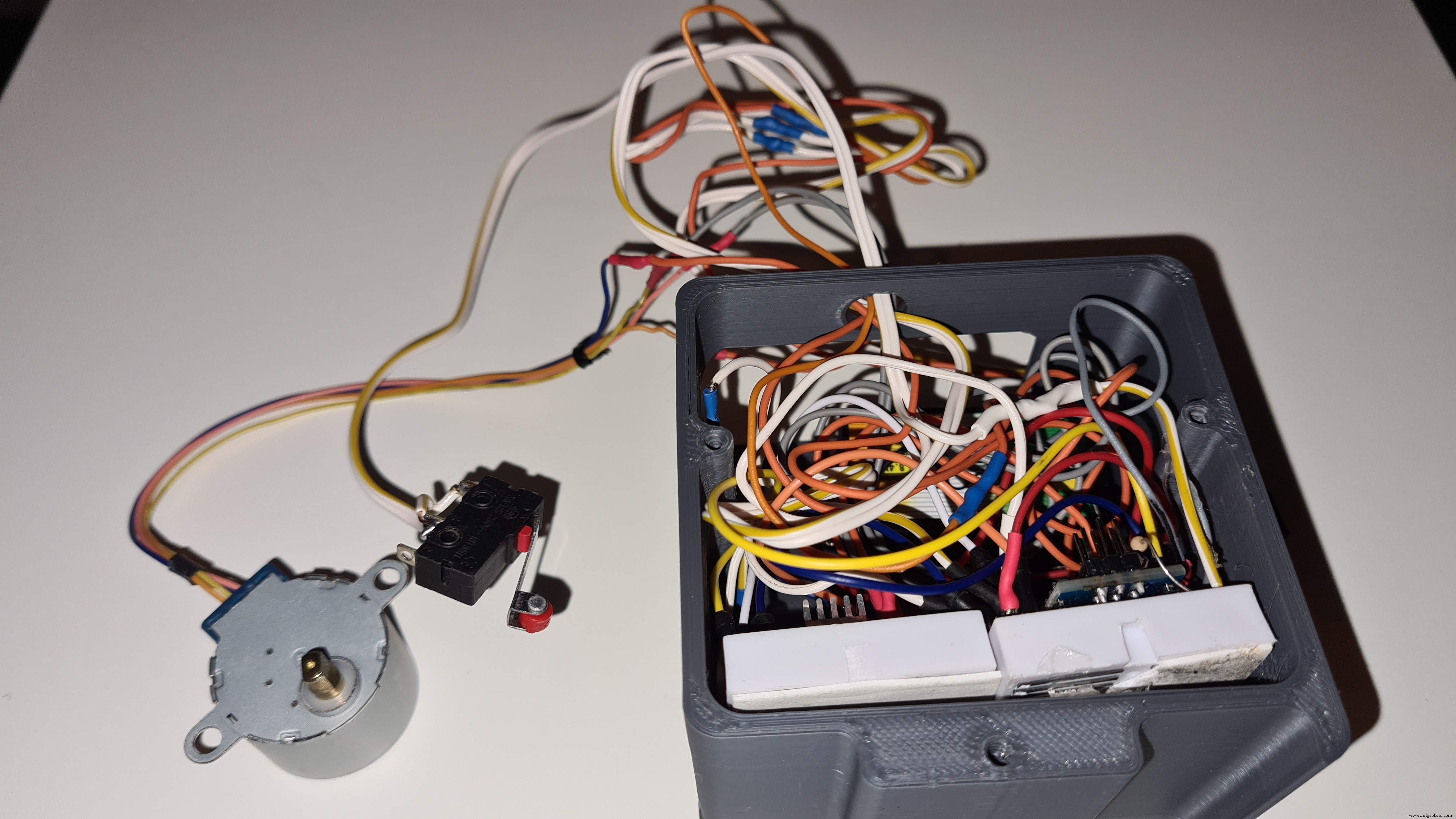
Поместите вашу схему в корпус электроники. Пропустите кабели шагового двигателя, переключателя и ИК-датчика препятствий через отверстие.
Узел держателя ИК-датчика препятствий
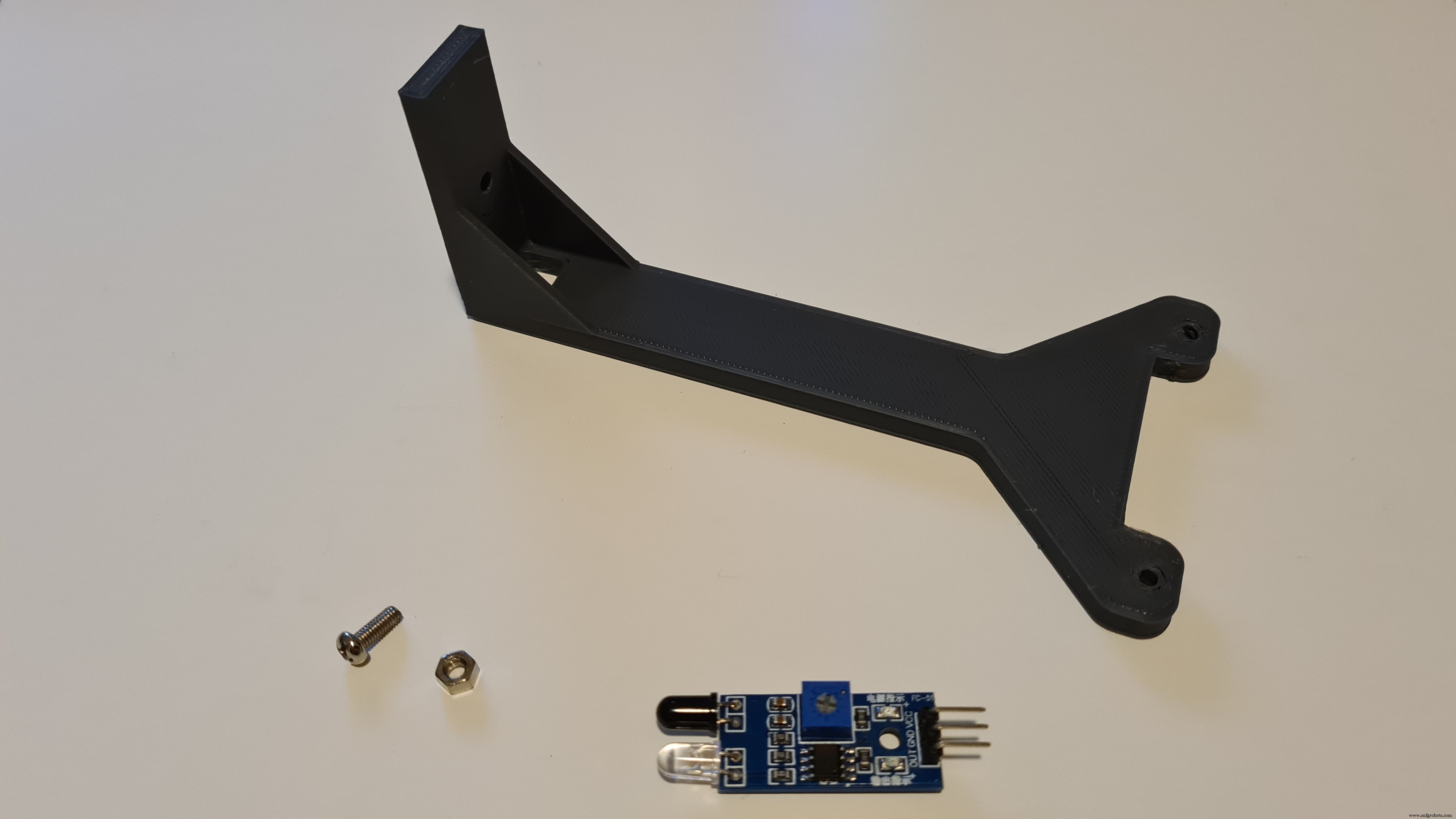
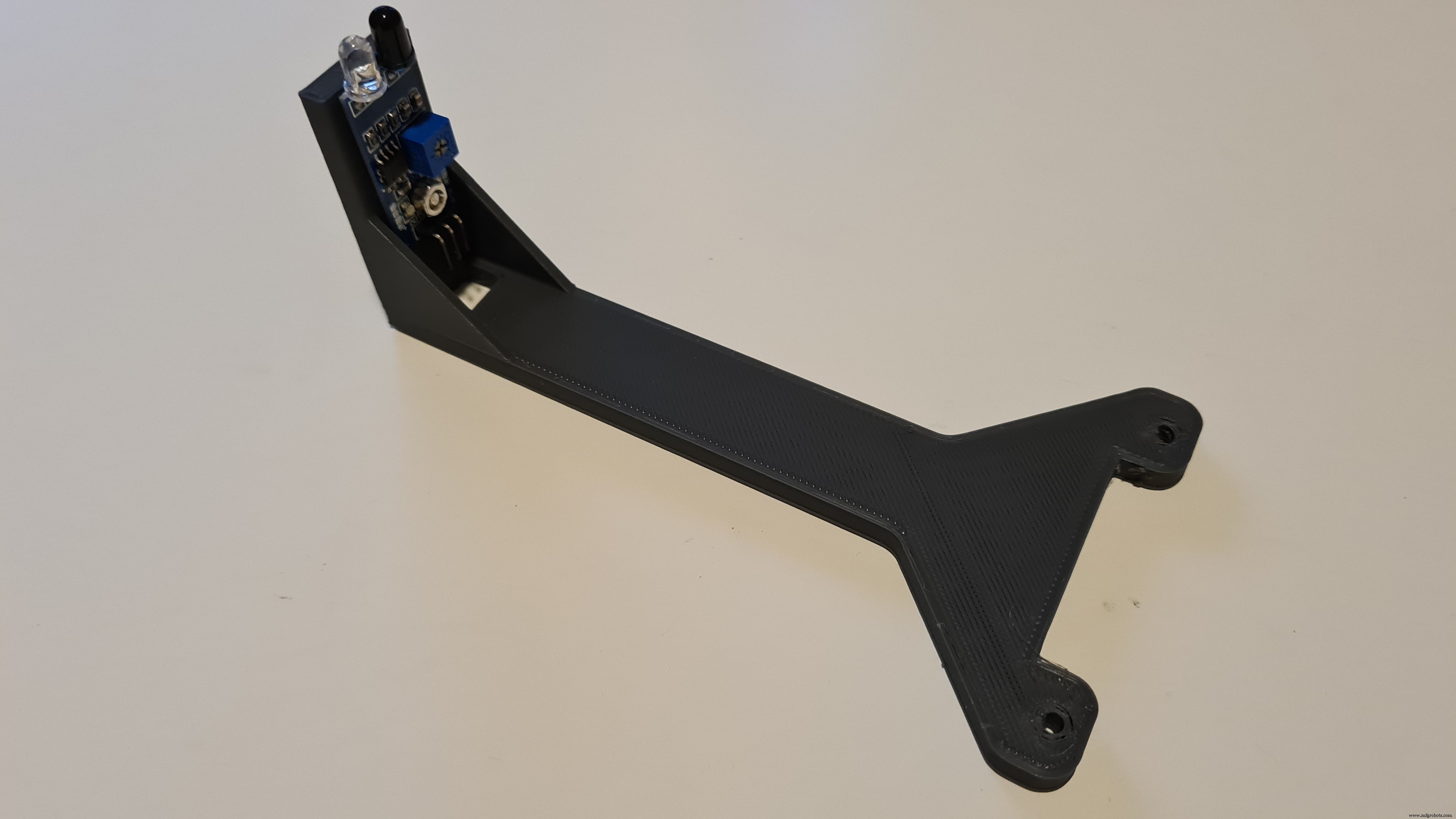
Прикрутите ИК-датчик препятствий к отверстию и с помощью гайки затяните его и отрегулируйте положение.
Финальная сборка!
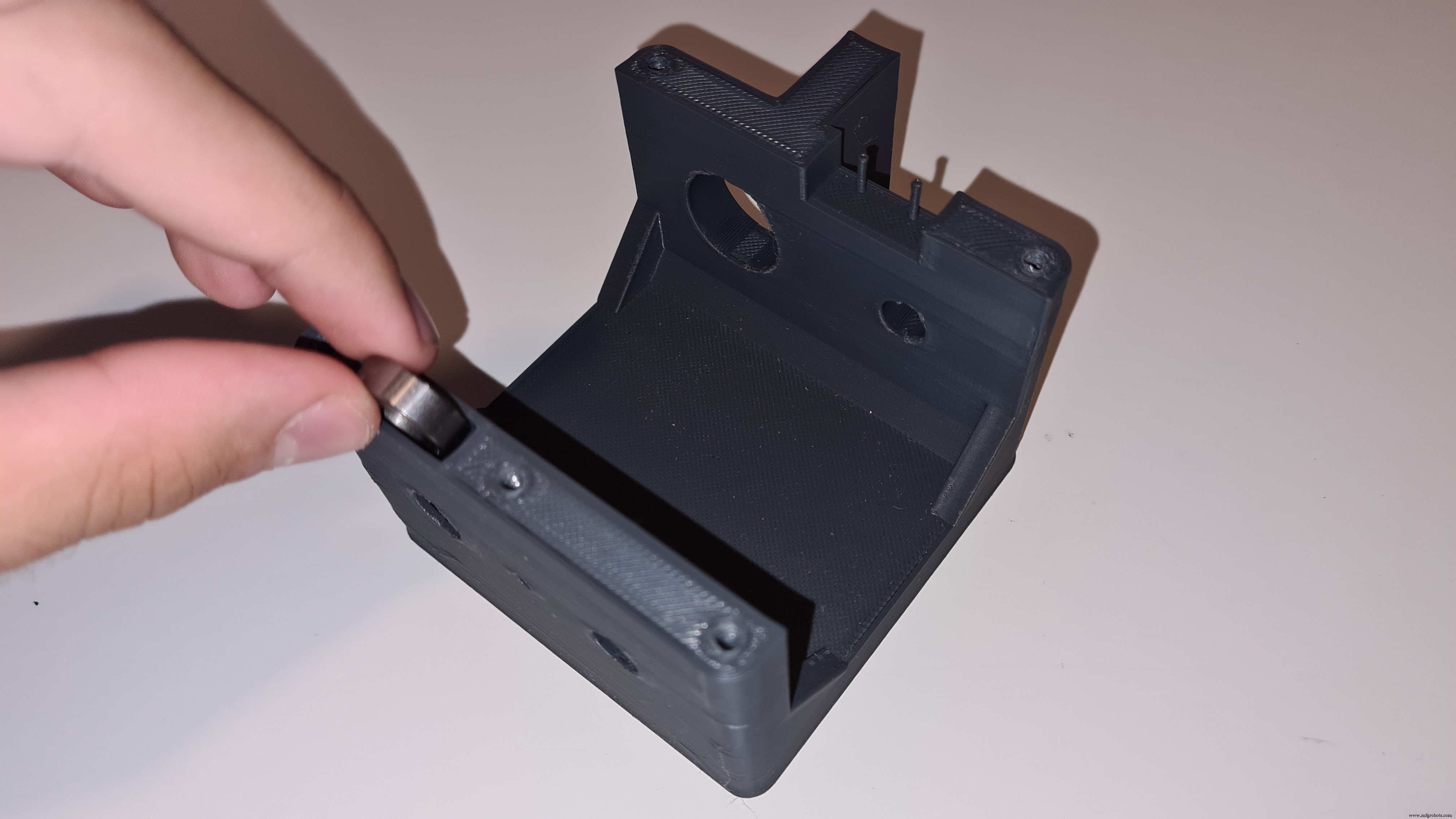
Вставьте подшипник.

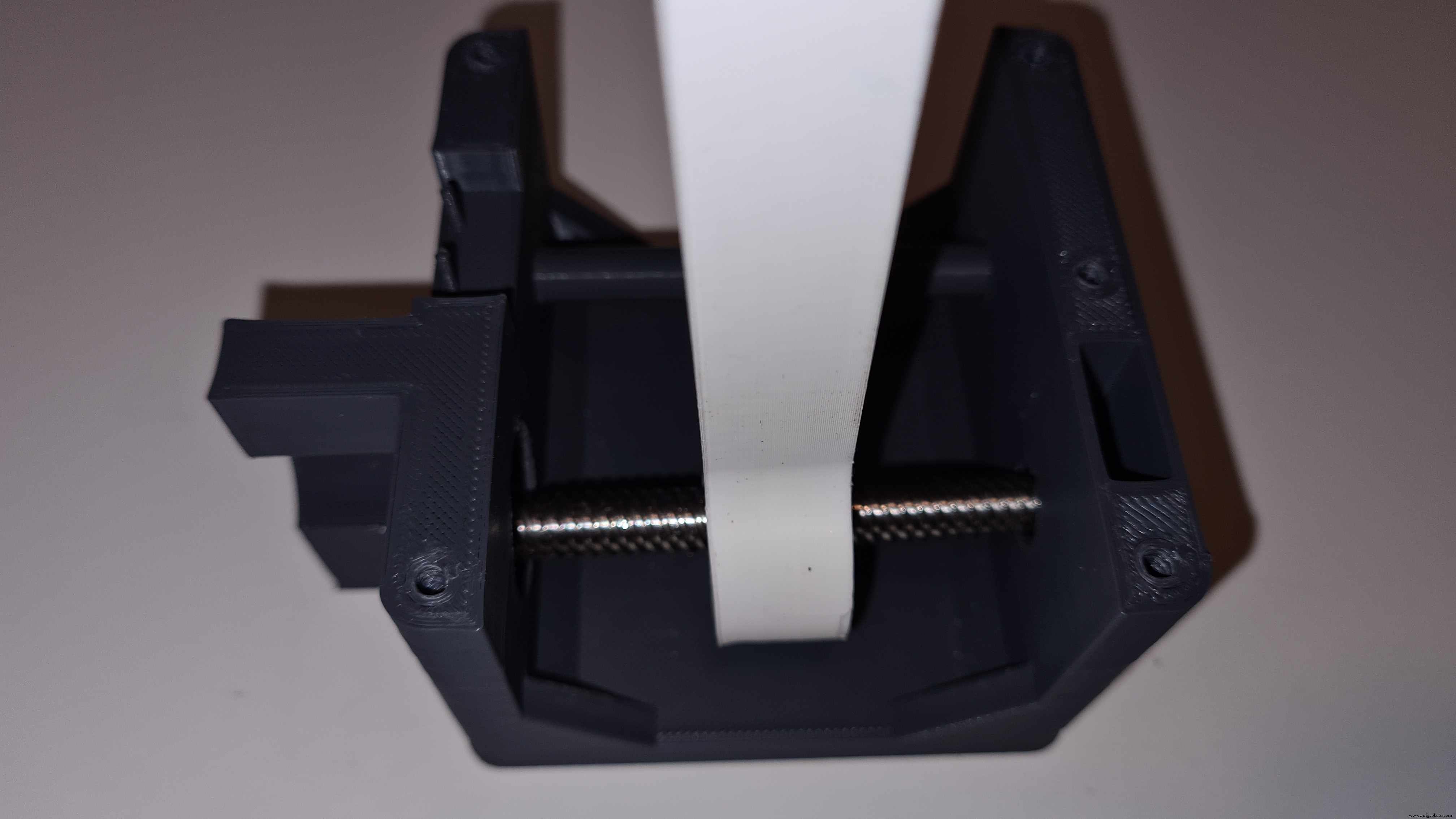
Добавьте винт T8 и узел прижимной лапки (винт T8 должен быть длиной от 70 до 82 мм . . Если у вас более длинный винт, вы должны отрезать его до нужного размера с помощью инструмента, например, ножовки. В противном случае вы можете попробовать его напечатать на 3D-принтере.)

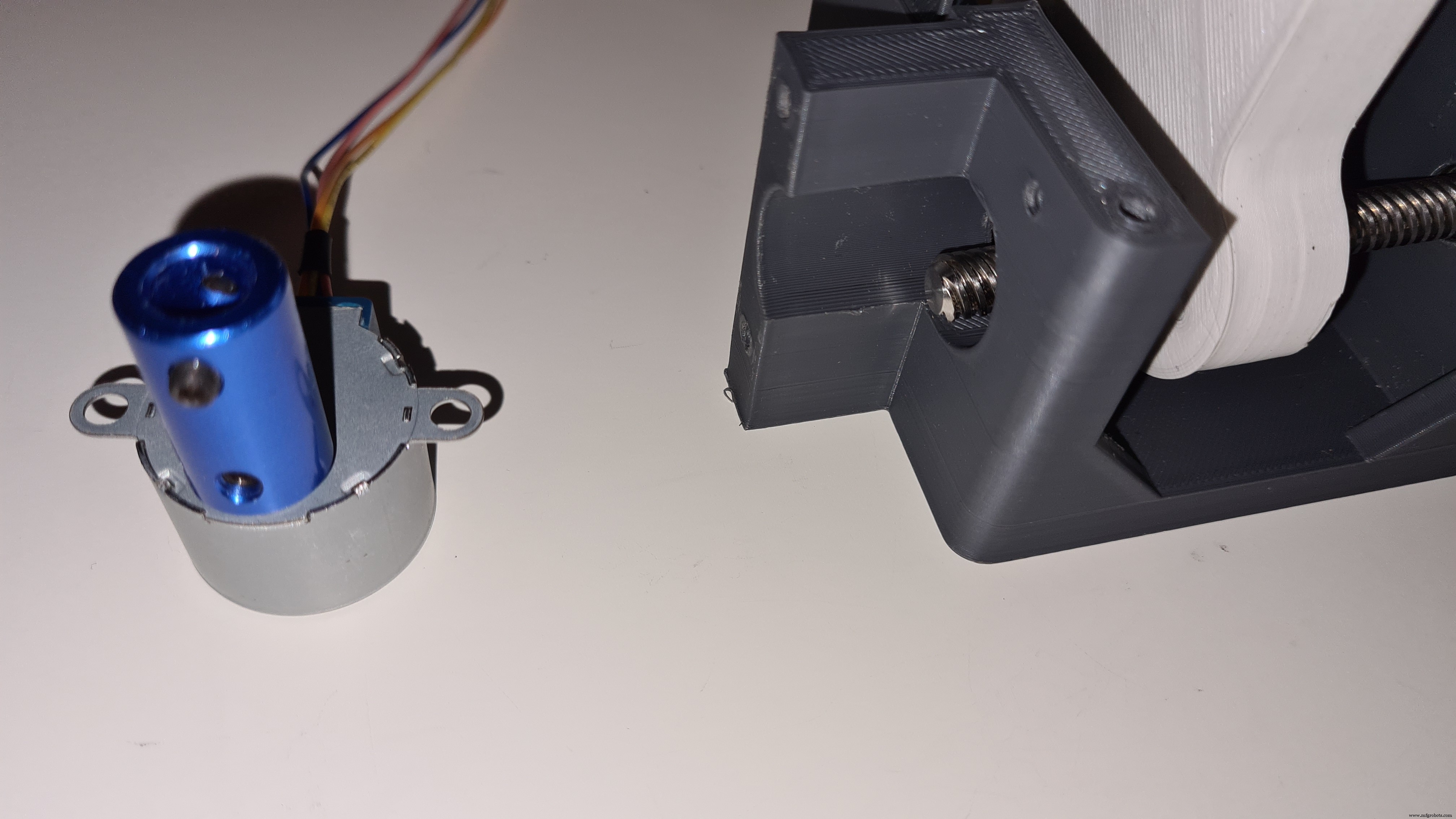
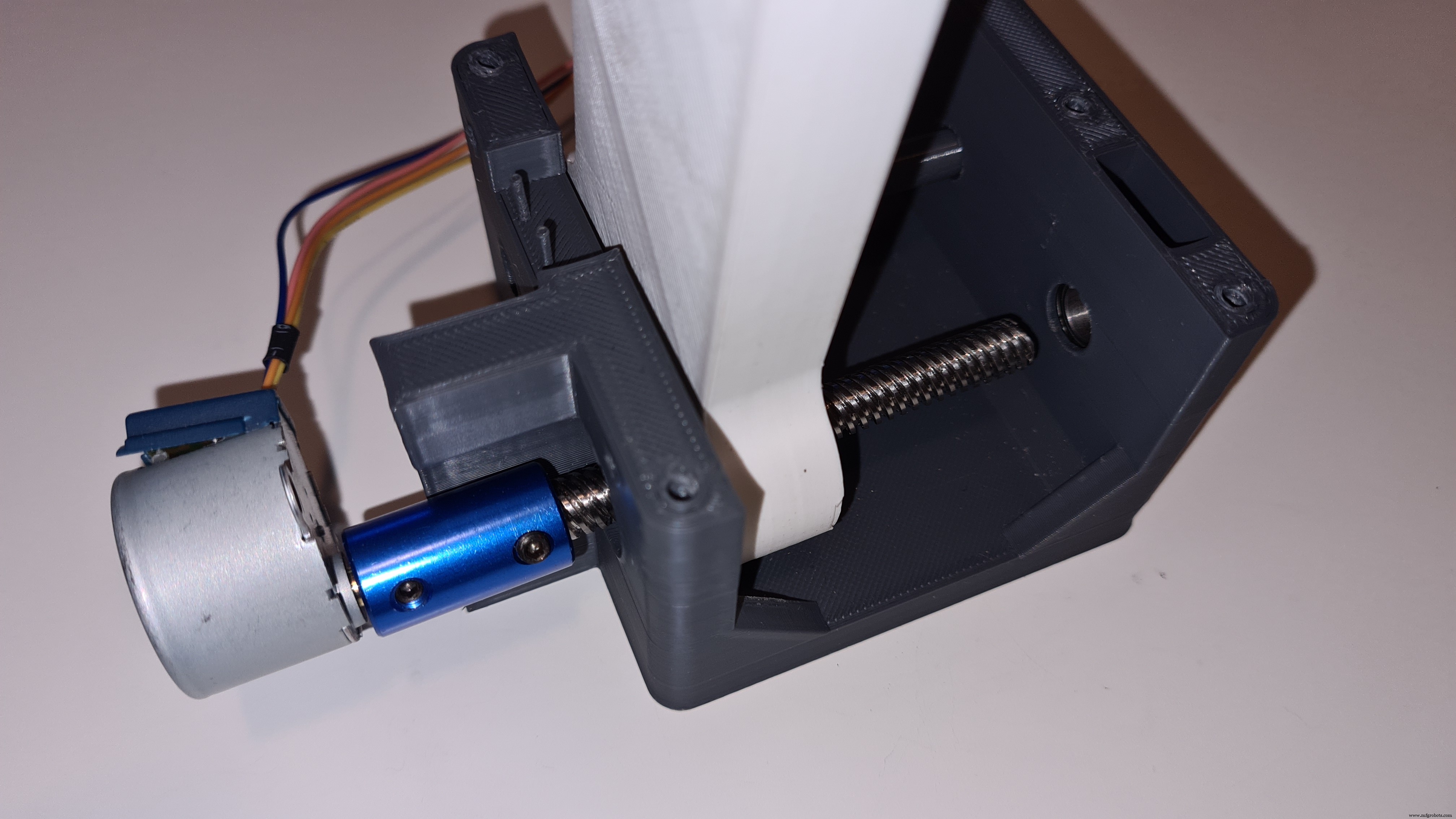
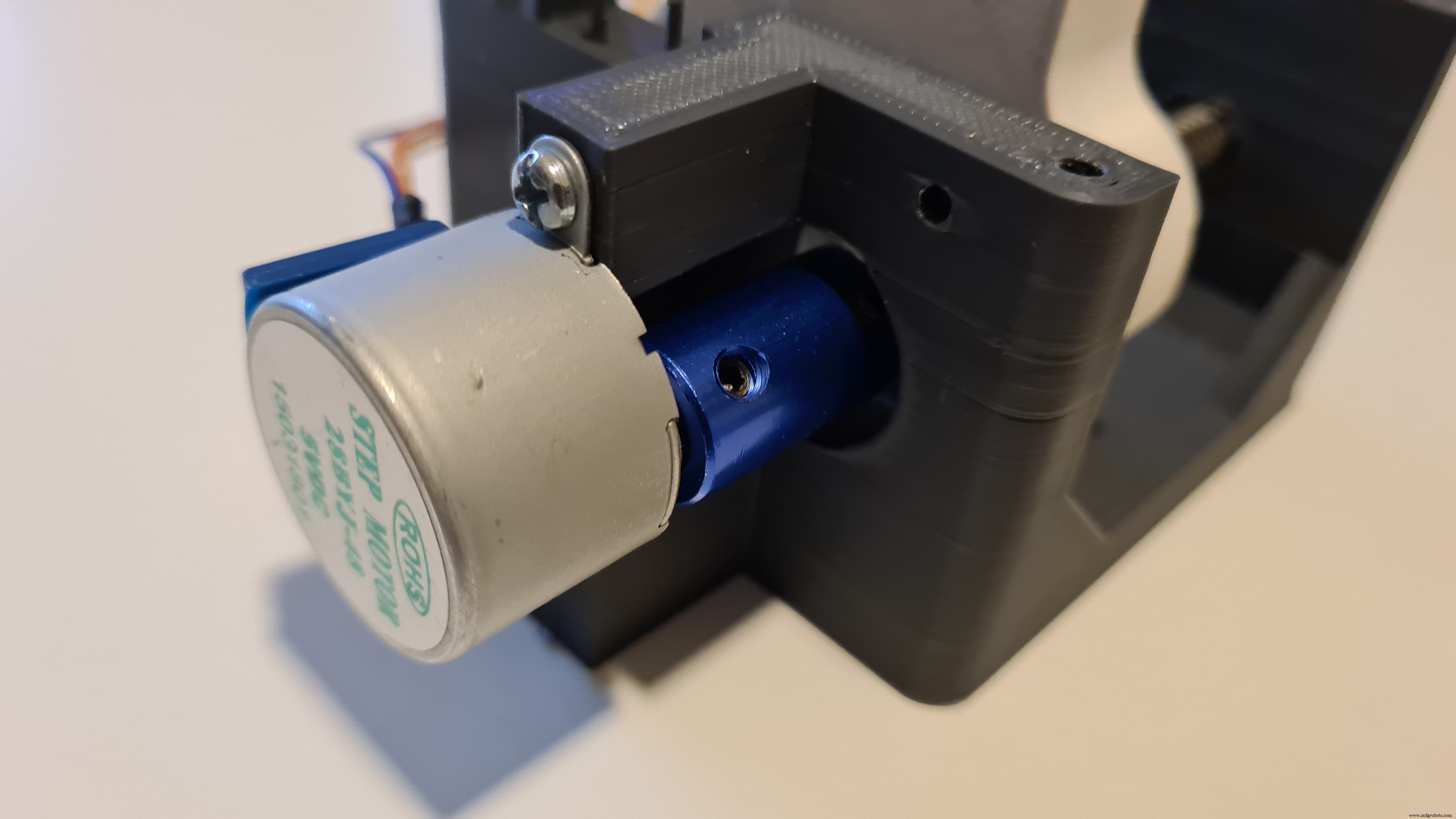
Затяните муфту на валу двигателя. Затем затяните его на винте T8. Наконец, прикрутите двигатель к основанию двумя винтами.
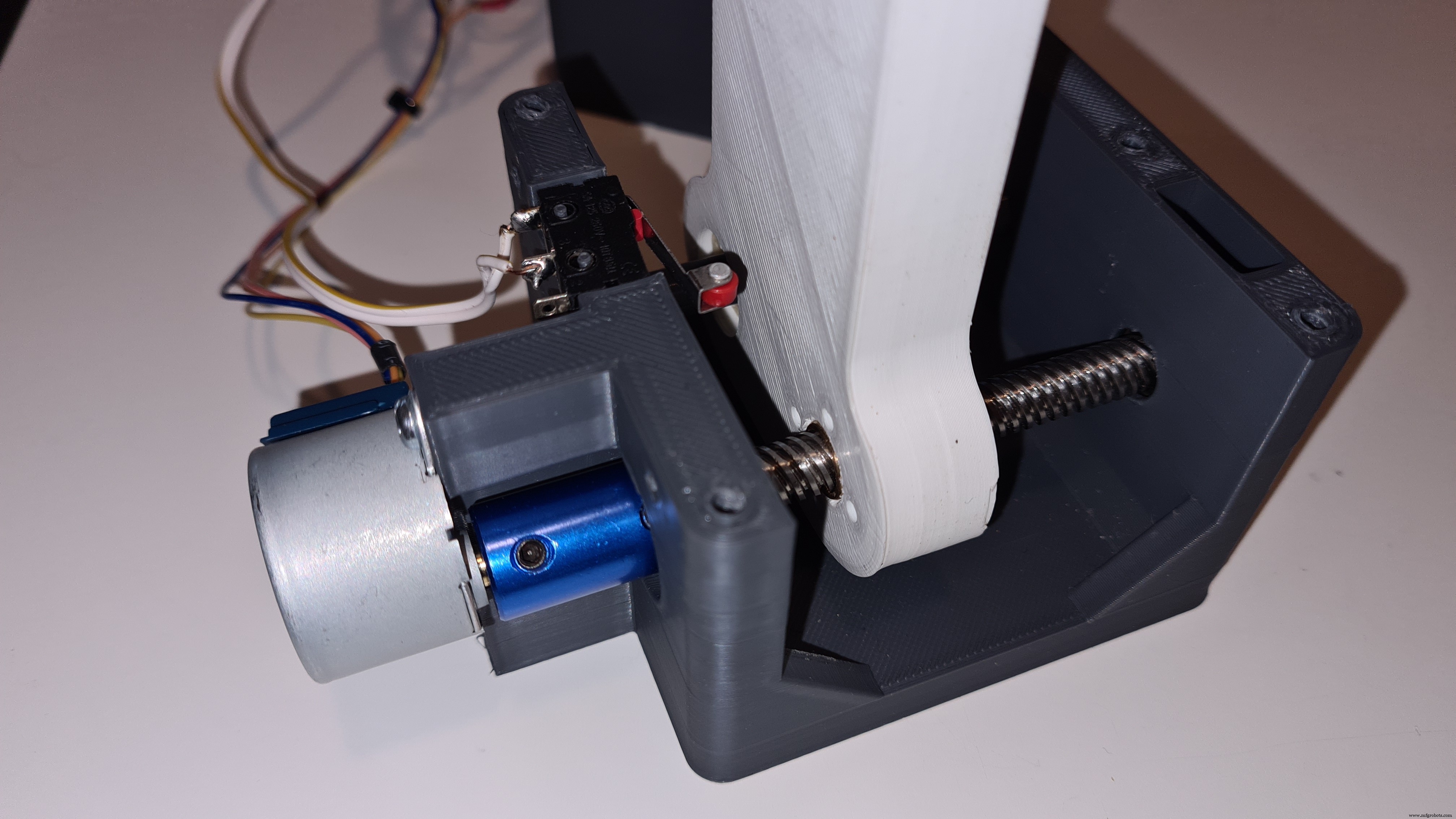
Добавьте концевой выключатель.
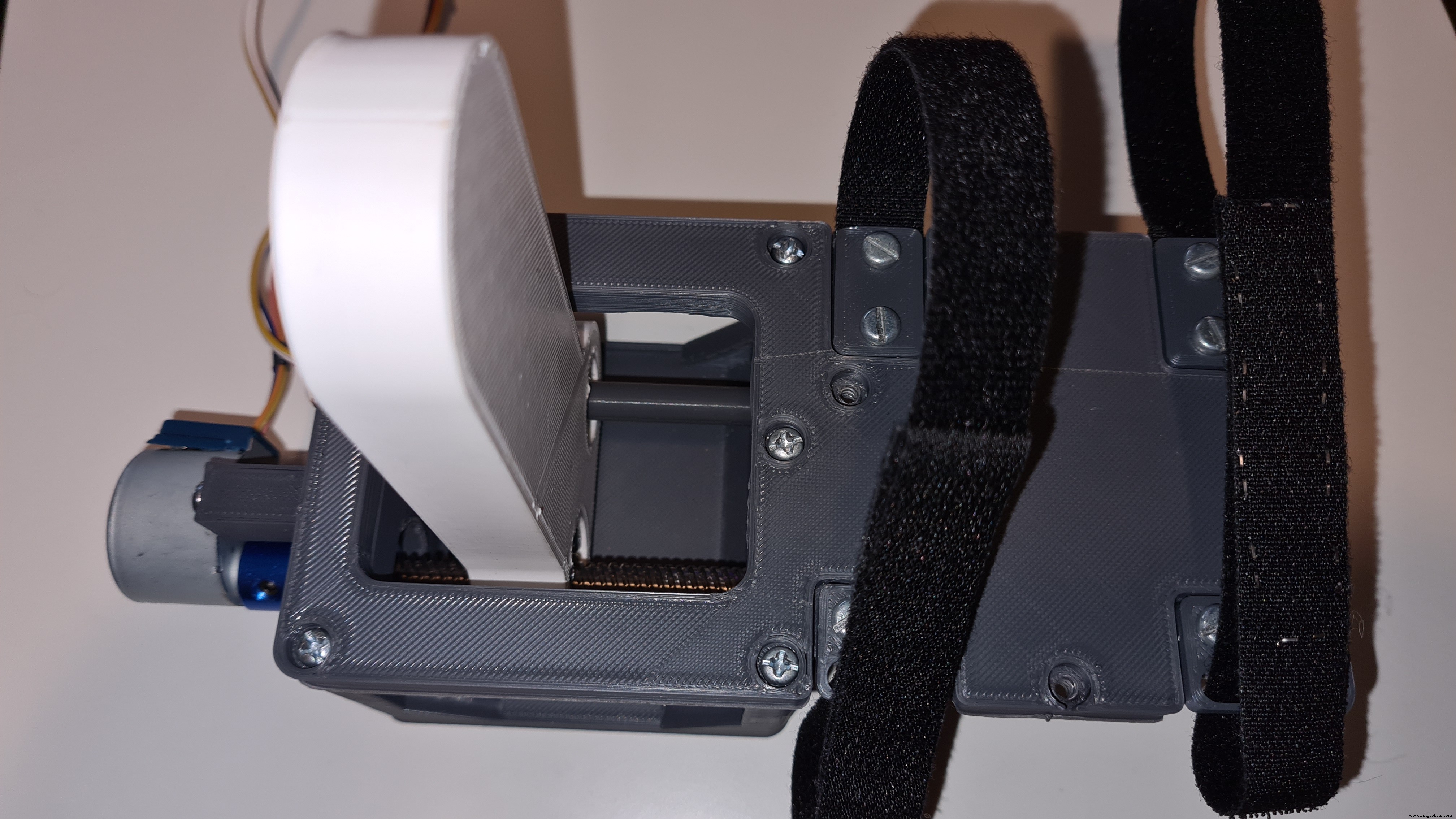
Прикрутите крышку к основанию с помощью 5 винтов.


Прикрутите держатель ИК-датчика препятствий к передней части основания с помощью 2 винтов.
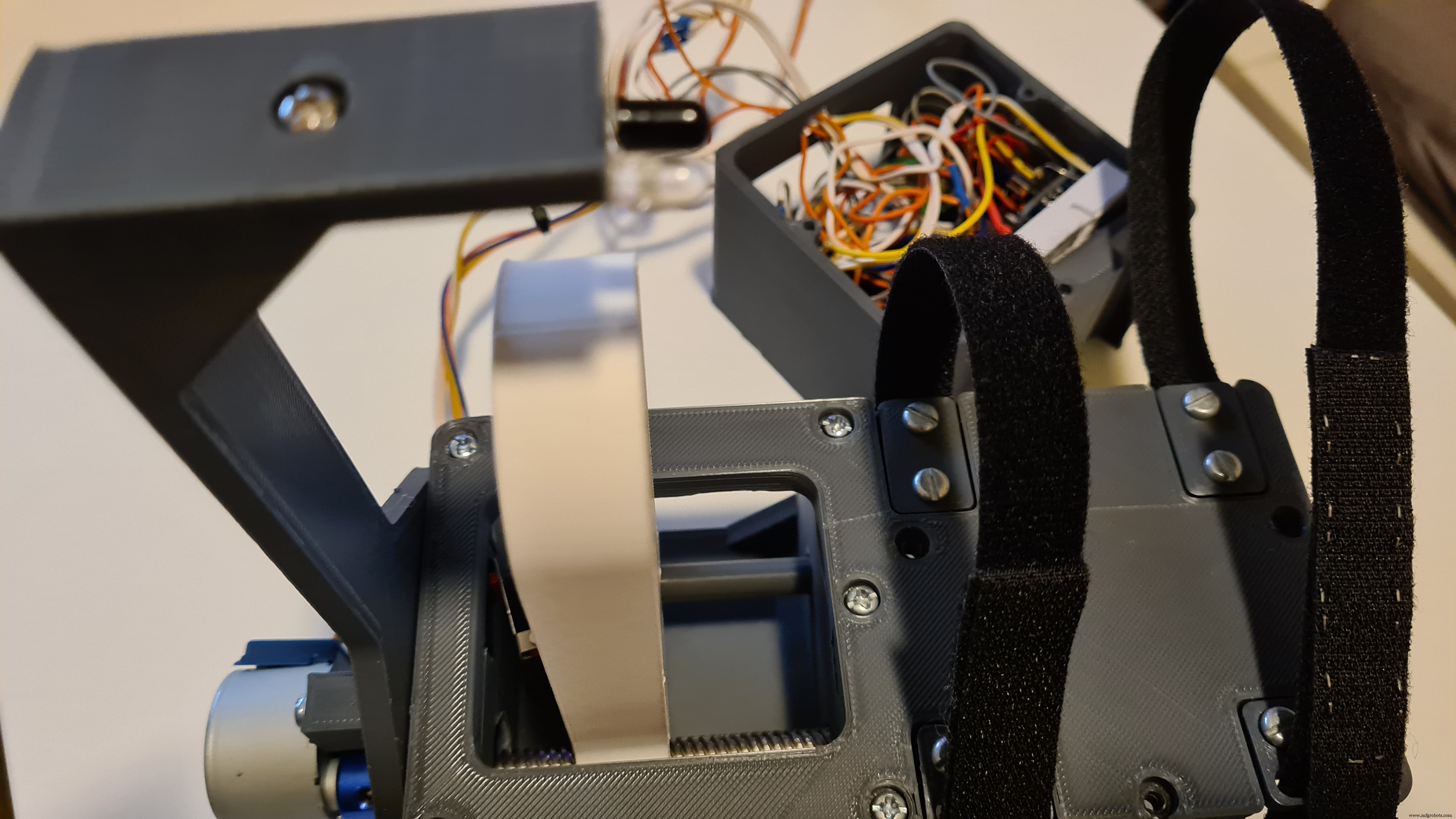
Окончательно прикрутите корпус электроники к крышке 3 винтами! Молодцы, проект завершен!
Заключение

Этот проект аксессуара, который может превратить большинство дезинфицирующих средств для рук / дозаторов мыла в полностью автоматический режим и функцию громкой связи, наконец завершен !!
Спасибо за уделенное время !!
Код
- Automatic_Hand_Sanitizer_Transformer.code
Automatic_Hand_Sanitizer_Transformer.code Arduino .
Код гаджета // Определяем соединения контактов и шаги двигателя на оборот const int dirPin =2; // определяем вывод dir драйвера const int stepPin =3; // определяем вывод шага драйвера const int enablePin =4; // определяем вывод включения драйвера const int stepsPerRevolution =6000; // один полный поворот (на 360 градусов) составляет 2048 шагов int endStop =8; // мы определяем входной контакт конечного выключателя int irSensor =9; // мы определяем входной контакт ИК-датчика препятствийvoid setup () {pinMode (endStop , INPUT); // Объявляем выводы как входы pinMode (irSensor, INPUT); pinMode (stepPin, OUTPUT); // Объявление контактов как выходов pinMode (dirPin, OUTPUT); pinMode (enablePin, ВЫХОД); digitalWrite (enablePin, LOW); // Это включает наш драйвер while (digitalRead (endStop) ==LOW) // Когда код запускается, шаговый двигатель будет вращаться до тех пор, пока не будет активирован концевой выключатель {// выключатель остановки digitalWrite (dirPin, HIGH ); // направление установлено против часовой стрелки // Вращайте двигатель медленно для (int x =0; x <1; x ++) {digitalWrite (stepPin, HIGH); delayMicroseconds (2000); digitalWrite (stepPin, LOW); delayMicroseconds (2000); }} digitalWrite (enablePin, HIGH); // Это отключает наш драйвер, чтобы // когда он не использовался, он не потреблял текущий} void loop () {if (digitalRead (irSensor) ==0) // Если есть препятствие (рука) перед ИК-датчиком препятствий {digitalWrite (enablePin, LOW); // Включаем драйверdigitalWrite (dirPin, LOW); // направление задано как по часовой стрелке // Медленно вращать мотор для (int x =0; x Изготовленные на заказ детали и корпуса
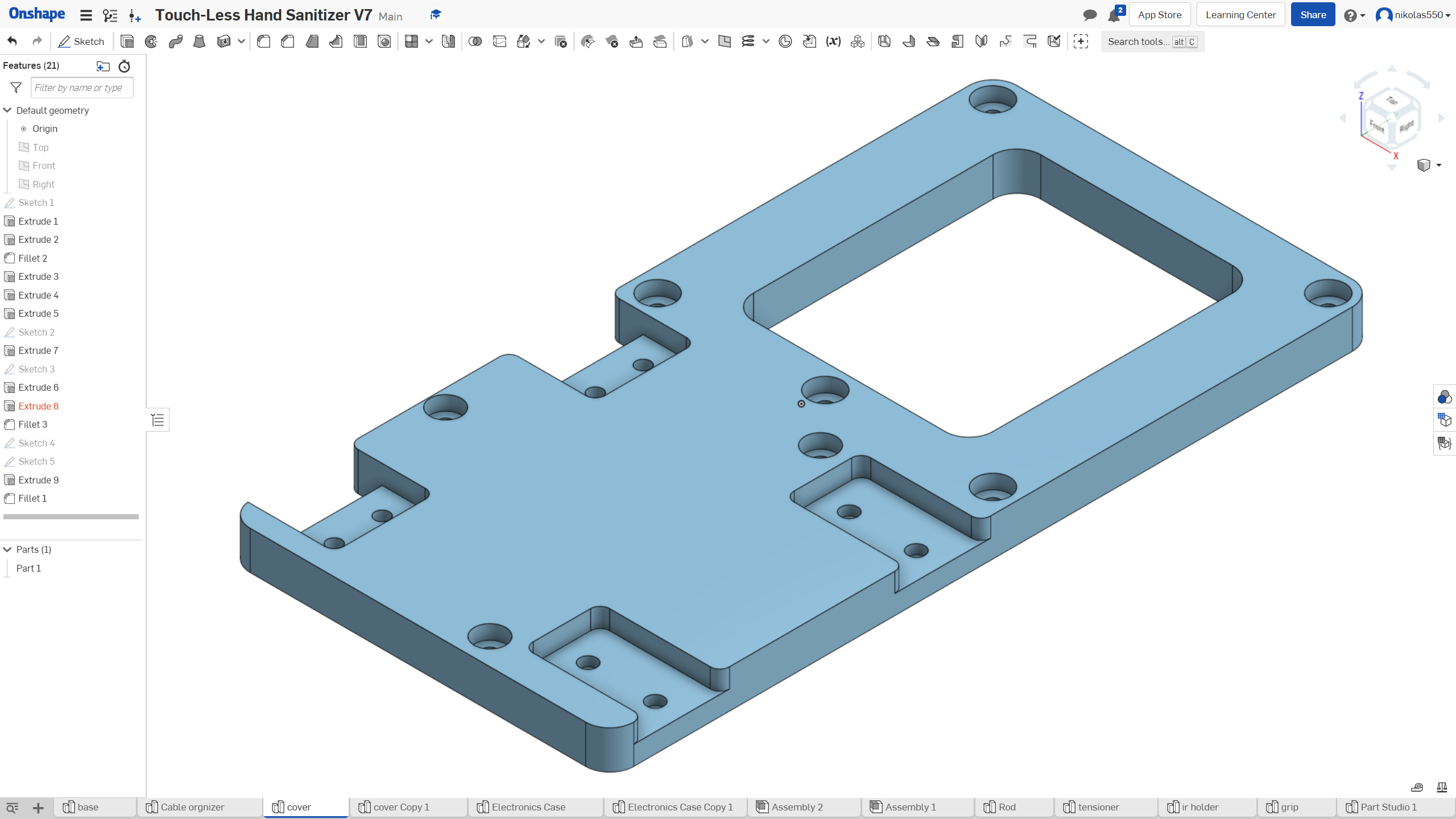
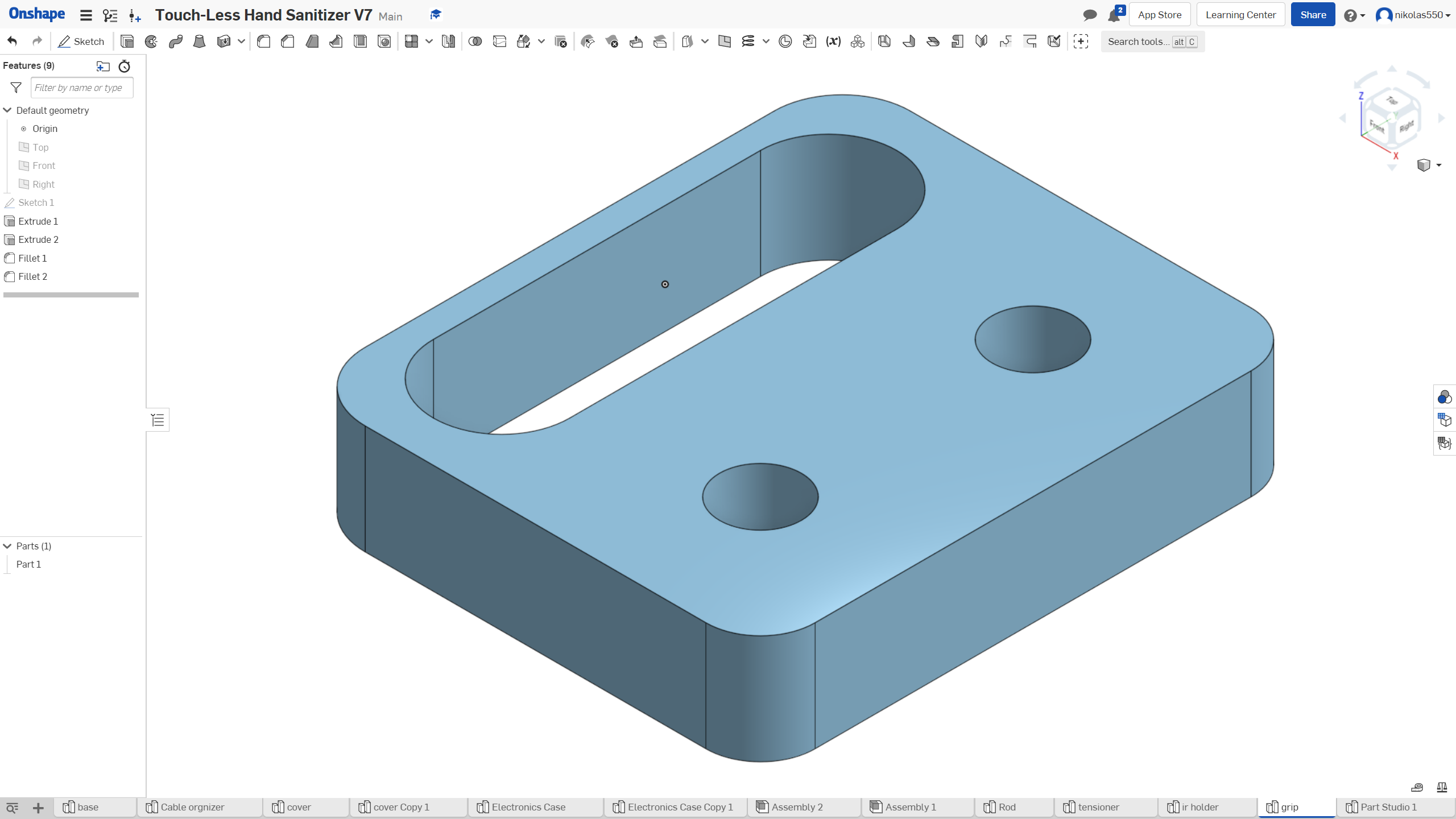
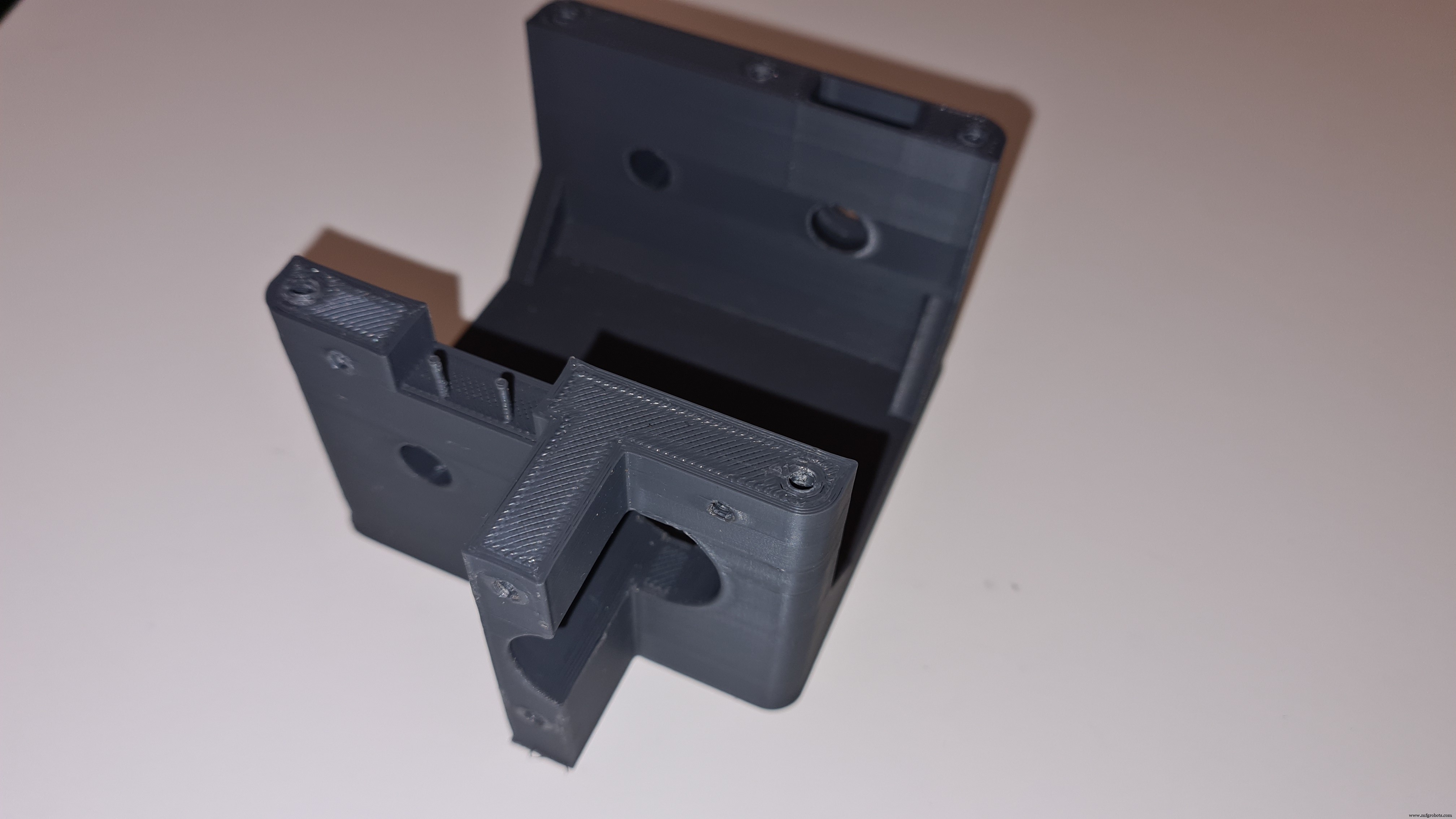
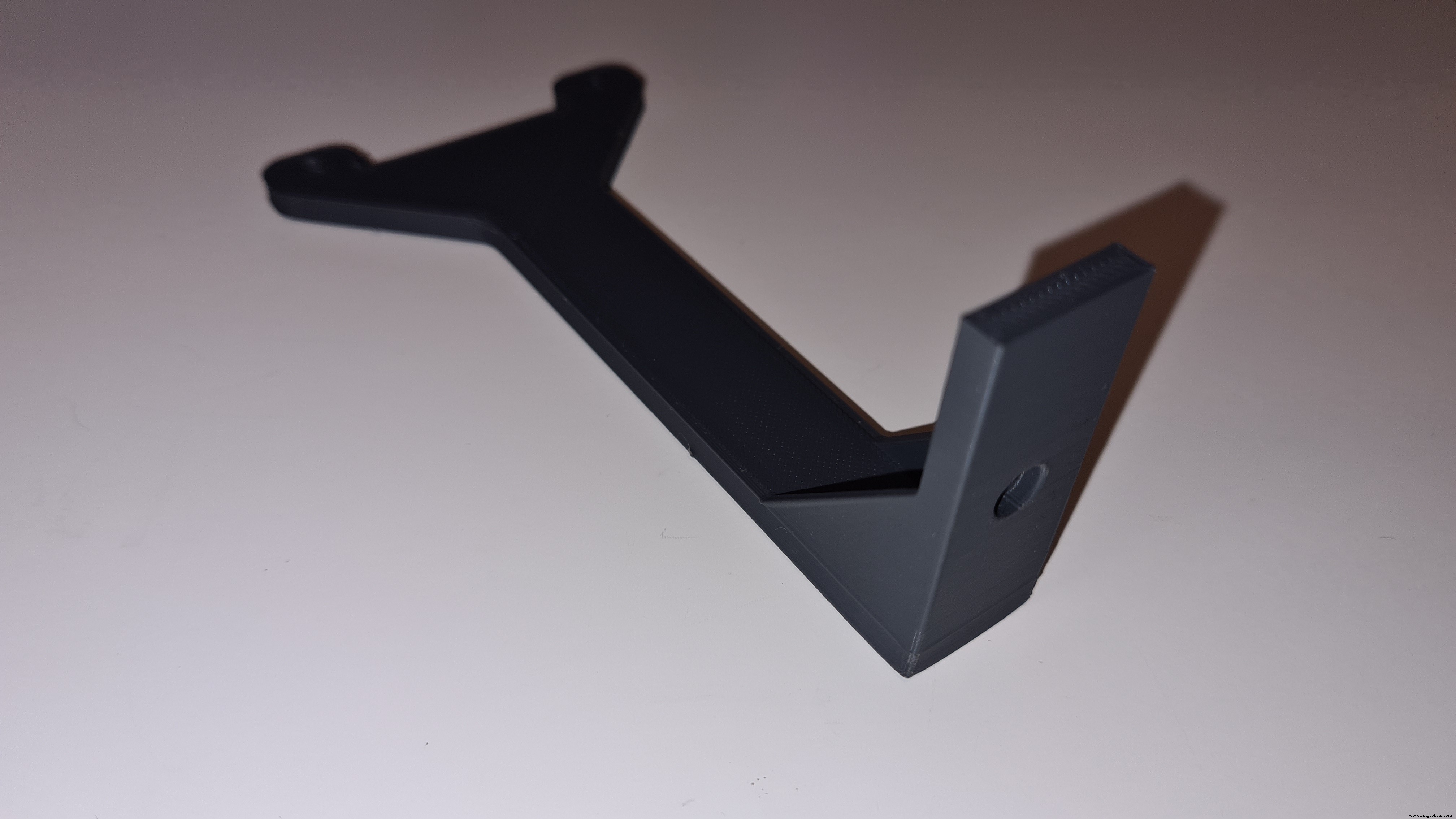
Основное основание устройства. Это компонент, который фактически прижимает дозатор. Крышка устройства. Действует как корпус для электроники. Создает механизм завязывания липучки.Вам понадобятся два из них. Действует как опора для прижимной части. Он подключается к основанию и действует как опора для инфракрасного датчика. Удерживает липучки на крышке.
Вам понадобится 2 штуки.
Схема
Производственный процесс