


Уродливая ошибка
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Фон
Вот быстрый и простой маленький робот, который можно собрать и собрать примерно за полчаса с помощью подходящих инструментов и деталей.
Это не я изобретал. Я увидел видео о подобной вещи на YouTube и подумал:«Эй, выглядит забавно, я сделаю такую».
Поэтому я взял несколько сервоприводов из своего мусорного ящика, старую батарею мобильного телефона, которую я хранил в надежде найти что-нибудь интересное, что с ней можно сделать, Arduino Pro 3.3v, которую я купил по прихоти, потому что мне нужно было достичь квоты на бесплатная доставка и приступили к работе.
Примерно через час - вот оно!
Сборка
Начнем с базовой сборки.
Отрежьте монтажный рычаг, который находится напротив той стороны, где выходят провода на одном из сервоприводов (это будет ваш задний сервопривод). Задний сервопривод указывает вниз, а другой - вперед. Вы можете использовать клей или кабельные стяжки, чтобы удерживать их вместе.

Затем прикрепите красный и черный провода к плюсу и минусу батареи вашего мобильного телефона (я удержал их на месте с помощью электротехнической ленты). Если у вас литий-ионный аккумулятор, то вам не придется с этим бороться :)
Затем я приклеил мини-макет к аккумулятору. Вы, конечно, не обязаны. Это зависит от того, планируете ли вы когда-либо повторно использовать части этого робота или нет.
Кабелем привяжите аккумулятор и макет к разъему сервопривода.
Сделайте надрез в шарике для настольного тенниса. Звучит просто, правда? :) Возможно, это самый сложный шаг во всем этом уроке! Шарик для пинг-понга замечательно твердый и к тому же ... круглый. Чтобы разрезать круглые предметы, нужно терпение. И носить очки !!! Неважно, каким устройством вы его режете. Пластик (или какой-то другой материал, из которого была сделана мина) много раскалывается. Итак, очки ! Я хочу, чтобы вы по-прежнему могли прочитать оставшуюся часть этого урока после того, как закончите резку!
Убедитесь, что ваш Arduino хорошо входит в отверстие. А затем приклейте мяч для пинг-понга к остальной части животного.
Что касается ног, оставляю вас на ваше усмотрение. У меня был простой кусок стальной проволоки толщиной 1 мм, загнутый внутрь и вокруг крыльев крепления сервоприводов (как на картинке). На конце каждой ноги я поместил маленькую ножку, вырезанную из палочки для клея, для захвата.>
Просто нагрейте проволоку зажигалкой и воткните ее в самодельную лапку. клей плавится при контакте и очень быстро снова затвердевает.
Перед тем, как прикрепить ноги к остальной части монстра, вам нужно выполнить схему и загрузить эскиз на доску. Вам нужно будет прочитать об этом, если вы не знаете, как загрузить эскиз в Arduino Pro Mini. https://www.arduino.cc/en/Guide/ArduinoProMini
Код для этого очень простой, поэтому я не буду его вдаваться в подробности.
Он имеет 5-секундную задержку в конце настройки, поэтому у вас есть время отключить Arduino до того, как ноги начнут двигаться, но после их центрирования.
Теперь вы можете поставить ноги и прикрутить их.
После того, как ножки прикручены на место, вы даже можете редактировать программу и сокращать (или удалять) задержку в строке 13.
Демонстрация
Если все прошло хорошо, у вас должен появиться симпатичный маленький парень, который выглядит примерно так:
И посмотрите видео о трицератопсах от ClaudioGasp в комментариях! Это УДИВИТЕЛЬНО!
Код
- Ошибка
Ошибка Arduino
#includeint FRONT =4; int BACK =5; Servo frontLegs, backLegs; void setup () {pinMode (13, OUTPUT); // Это просто для красиво мигающего frontLegs.attach (FRONT); backLegs.attach (НАЗАД); frontLegs.write (90); // Центрировать сервопривод backLegs.write (90); // Центрировать задержку сервопривода (5000); // Ждем 5 секунд (это дает нам время, чтобы отключить Arduino // чтобы мы могли прикрепить ножки.} Void loop () {digitalWrite (13, HIGH); // LED on delay (200); frontLegs.write (70 ); // немного сдвинуть переднюю ногу (200); backLegs.write (70); // немного сдвинуть заднюю ногу digitalWrite (13, LOW); // задержка выключения светодиода (200); frontLegs.write (110); // немного сдвинуть переднюю ногу delay (200); backLegs.write (110); // немного сдвинуть заднюю ногу}
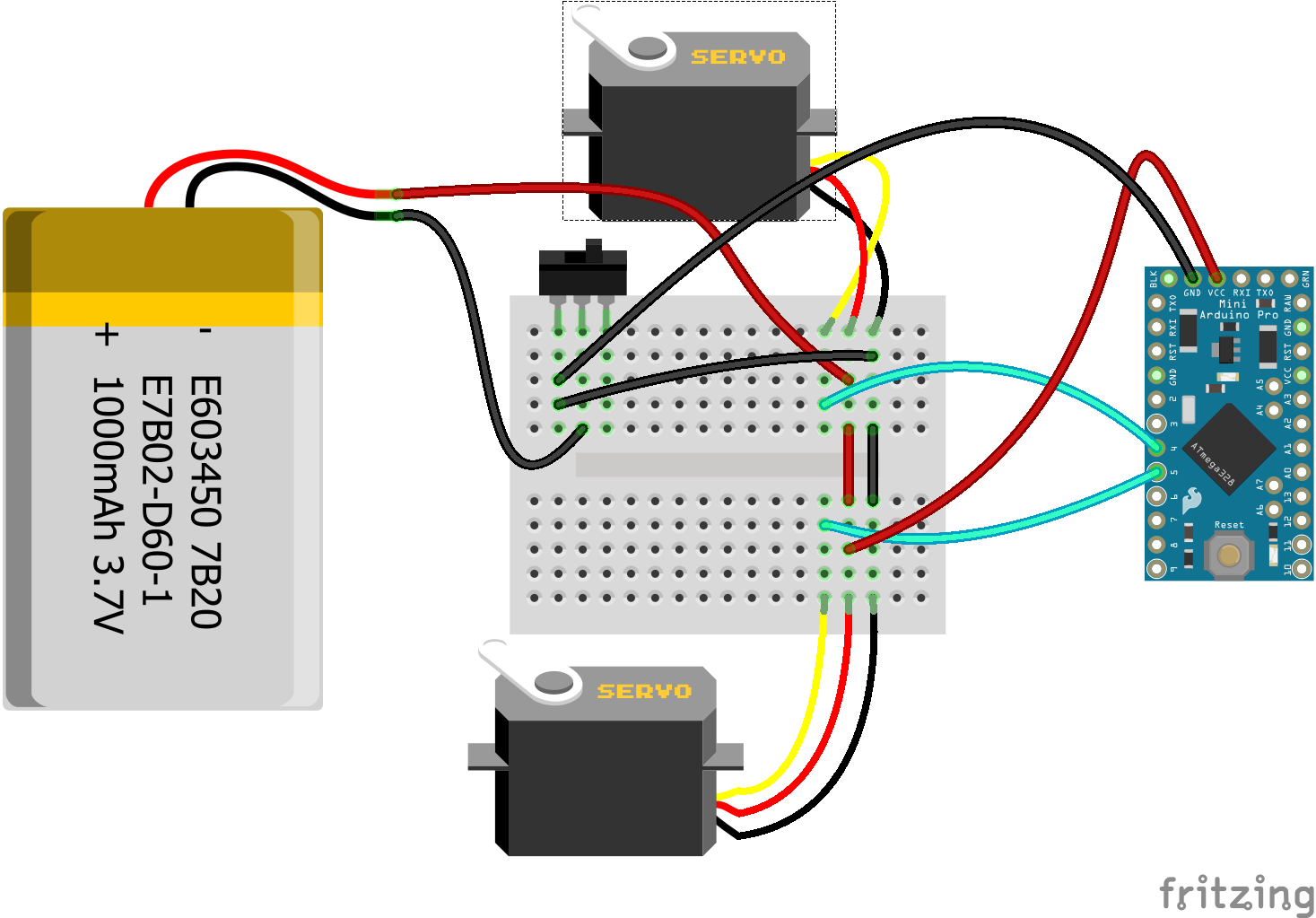
Схема
bug_Yr3jFYFuNQ.fzzПроизводственный процесс