


Модуль Arduino + GPS - средство уведомления о пункте назначения
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Необходимые инструменты и машины
 |
| |||
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Введение:проблема и решение
Всем известно, что пробки на дорогах могут сильно расточить время. И невозможно предсказать, сколько времени займет путь от пункта отправления до пункта назначения.
Проблема пробок коснулась меня, когда я приехал в город два месяца назад. Каждый день больше двух часов провожу в пробках. И я подумал, почему я не могу использовать это время для чего-то?
Примечание:пользуюсь общественным транспортом. :-)
Есть много других вещей, которые вы можете сделать, попав в пробку!
Некоторые из приведенных ниже не только забавны, но и продуктивны:
- Используйте время, чтобы подумать и спланировать как текущие, так и будущие проекты.
- Найдите время для самообразования, посмотрите обучающие видео или пройдите электронный курс по Udemy, Coursera и т. д.
И, конечно же, изготовление Меня всегда вдохновляет электроника. Итак, я создал средство уведомления о пункте назначения, используя Arduino и модуль GPS. Когда вы приближаетесь к месту назначения, он уведомляет вас светящимся светодиодом или вибрацией (с помощью миниатюрного вибрационного двигателя). Я предоставил схемы как для светодиода, так и для вибромотора.
Для этого сначала вам нужно найти широту и долготу, чтобы определить местоположение. Как только вы найдете свое местоположение, вы можете использовать значения широты и долготы, чтобы определить расстояние до местоположения, и, сохраняя диапазон, вы можете включить уведомитель. Логика простая, правда ?!
Итак, приступим .......
Детали и инструменты:
Вот необходимые части, чтобы начать работу с уведомителем пункта назначения:
- Arduino UNO
- Модуль GPS NEO-6M
GPS обозначает глобальную систему позиционирования и может использоваться для определения местоположения, времени и скорости, если вы путешествуете.

- Этот модуль имеет внешнюю антенну и встроенный EEPROM.
- Интерфейс:RS232 TTL
- Источник питания:от 3 до 5 В
- Скорость передачи по умолчанию:9600 бит / с.
- Работает со стандартными предложениями NMEA.
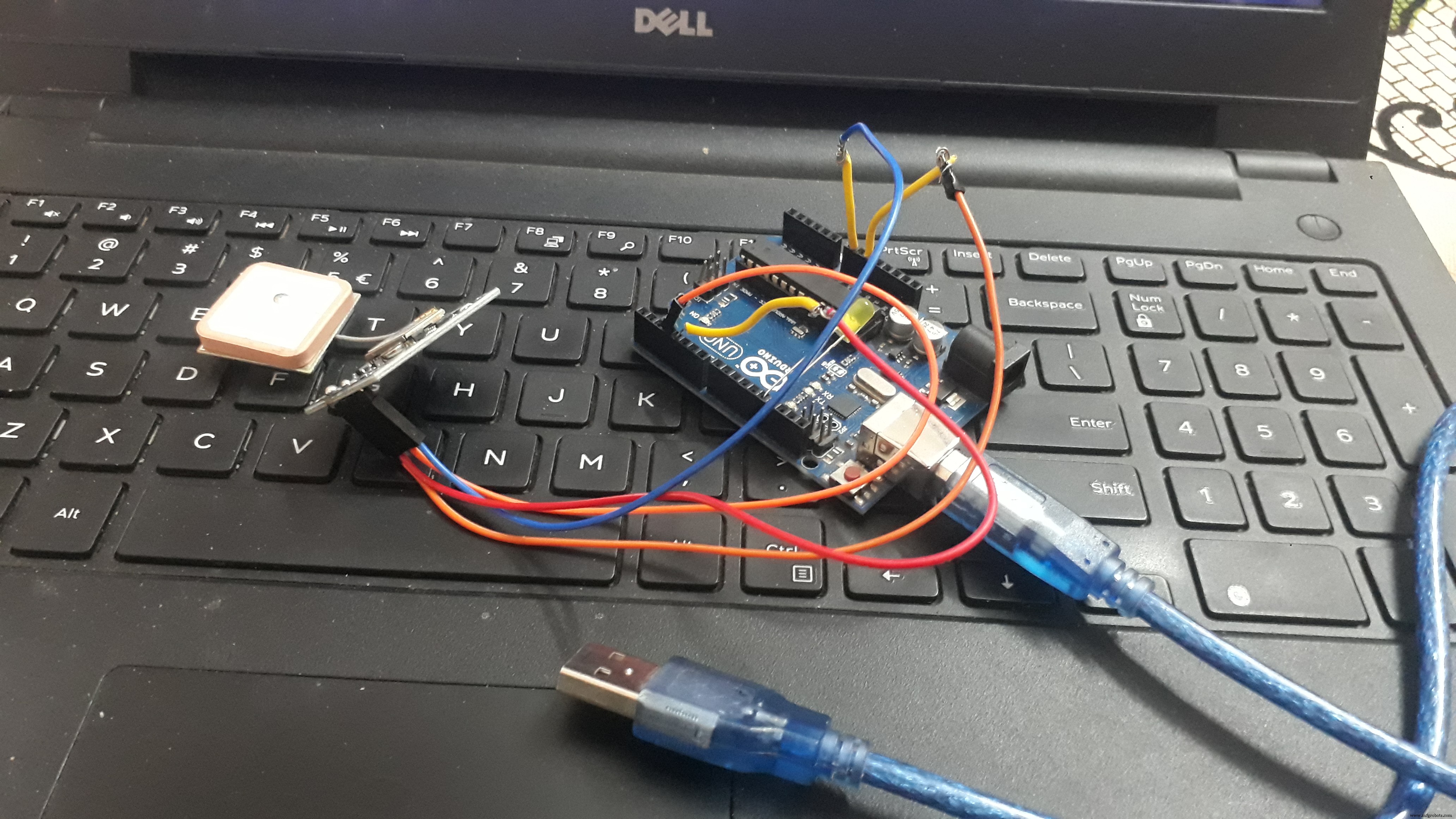
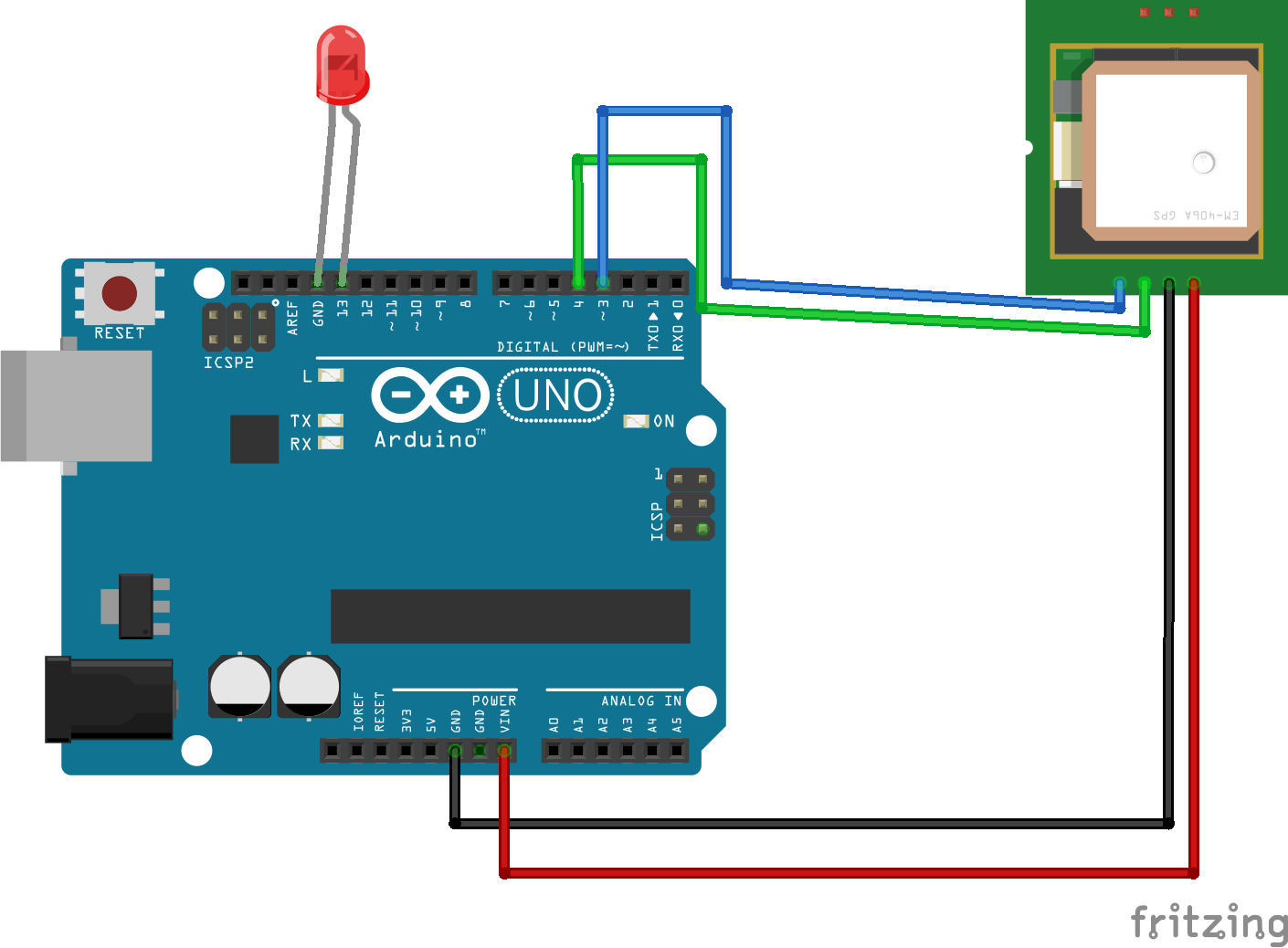
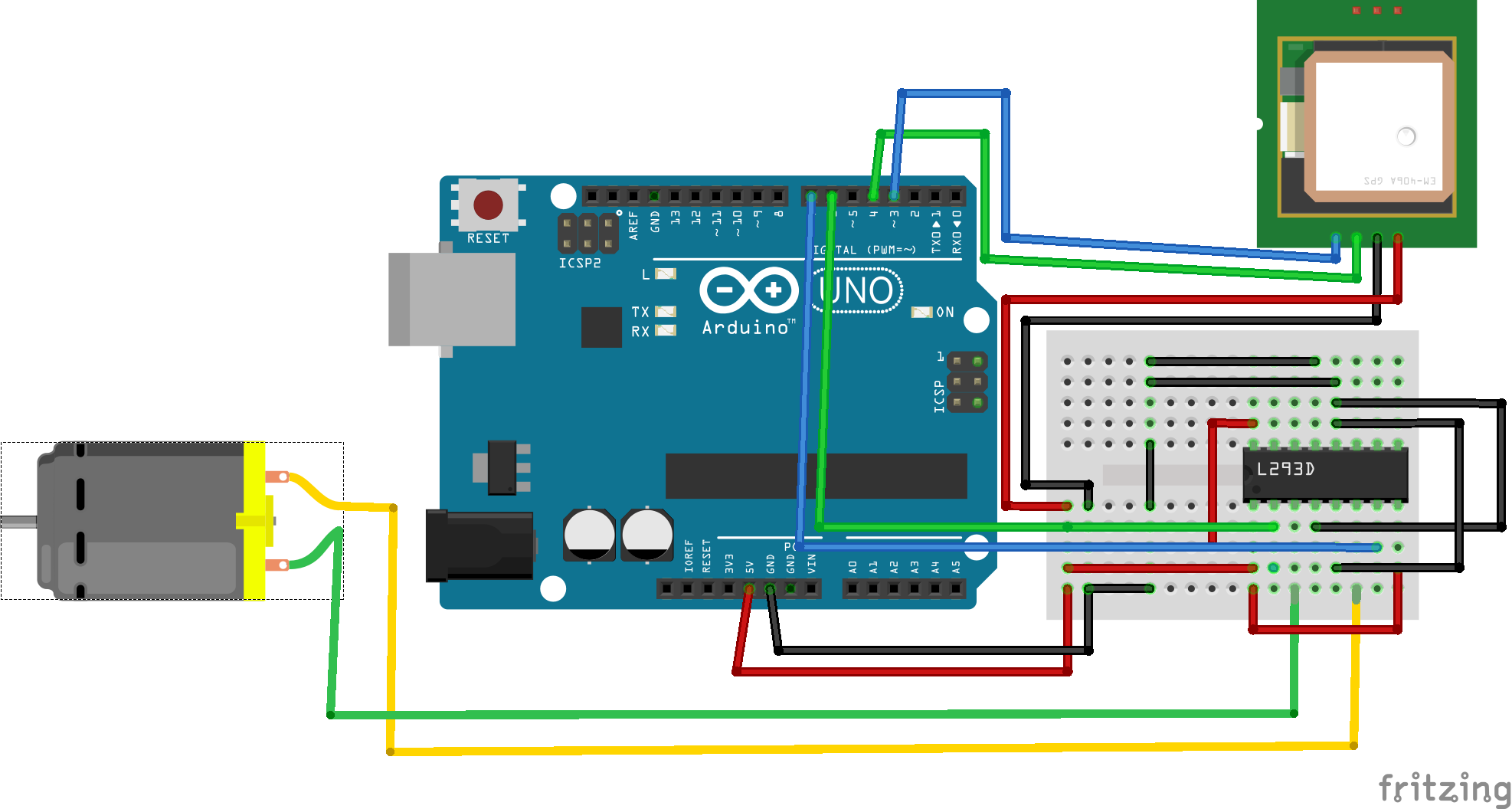
GPS-модуль NEO-6M имеет четыре контакта:VCC, RX, TX и GND. Модуль связывается с Arduino через последовательную связь с помощью контактов TX и RX, поэтому подключение не может быть проще:
Подключение GPS-модуля NEO-6M к Arduino UNO
VCC VIN
Вывод RX TX определен в серийном программном обеспечении
Вывод TX RX определен в серийном программном обеспечении
GND GND
L293D IC
L293D - это 16-контактная ИС драйвера двигателя, которая может одновременно управлять двумя двигателями постоянного тока в любом направлении.
Зачем использовать L293D?
На вход микросхемы драйвера двигателя или драйвера двигателя поступает слаботочный сигнал. Функция схемы состоит в преобразовании слаботочного сигнала в сильноточный. Этот сильный сигнал затем подается на двигатель.
Библиотека TinyGPS ++ :
Библиотека TinyGPS ++ упрощает получение информации о местоположении в удобном и понятном формате.
Библиотека TinyGPS ++ позволяет вам получить гораздо больше информации, чем просто местоположение, и простым способом, помимо местоположения, вы можете получить:
>> дата
>> время
>> скорость
>> конечно
>> высота
>> спутники
>> hdop
Захват широты и долготы:
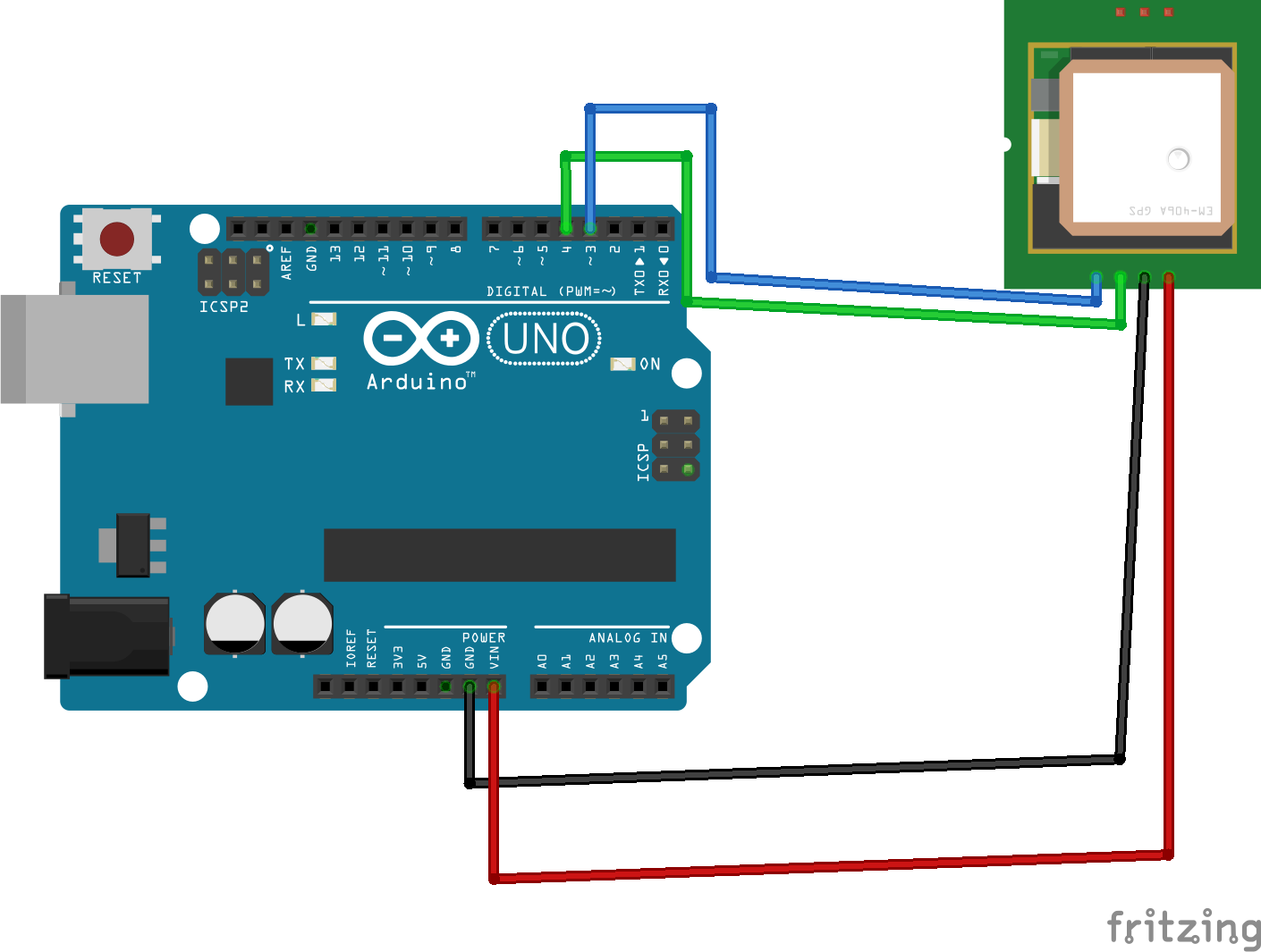
Я предлагаю загрузить файлы fritzing, указанные в конце проекта, для лучшего понимания связи или, если у вас есть сомнения, не стесняйтесь спрашивать в комментариях.
Код Arduino для захвата местоположения:
#include
#include
static const int RXPin =4, TXPin =3;
static const uint32_t GPSBaud =9600;
// Объект TinyGPS ++
TinyGPSPlus gps;
// Последовательное соединение с устройством GPS
SoftwareSerial ss (RXPin, TXPin);
void setup () {
Serial.begin (9600);
ss.begin (GPSBaud);
}
void loop () {
// Этот скетч отображает информацию каждый раз, когда новый предложение правильно закодировано.
while (ss.available ()> 0) {
gps.encode (ss.read ());
if (gps.location.isUpdated ()) {
Serial.print ("Широта =");
Serial.print (gps.location.lat (), 6);
Serial.print ("Longitude =");
Serial.println (gps.location.lng (), 6);
}
}
} Примечание:необходимо установить Библиотека TinyGPS ++
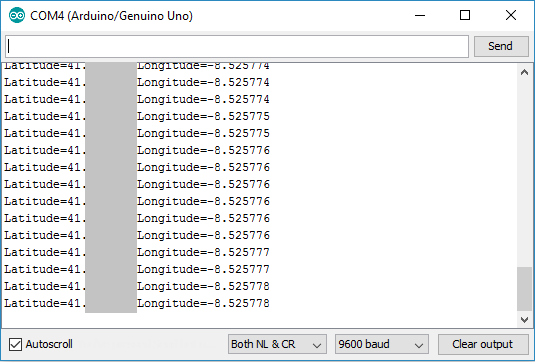
подключитесь в соответствии с принципиальной схемой и загрузите приведенный выше код, откройте последовательный монитор со скоростью 9600 бод, и вы увидите следующий результат
Примечание. Для определения широты и долготы может потребоваться некоторое время, поскольку приемник должен улавливать сигналы. всякий раз, когда он начинает получать сигналы, светодиод на модуле GPS мигает.
Индикатор уведомления о месте назначения:
Поэтому, чтобы убедиться, что моя идея работает, я сделал прототип, используя светодиоды для уведомления пункта назначения. Итак, что я сделал, я добавил значения широты и долготы пункта назначения из предыдущего кода (Read_Lat_Lng.ino) и нашел расстояние до пункта назначения от текущего местоположения. И использовал его для настройки диапазона, при котором светодиод должен включаться.
Код:
#include
#include
static const int RXPin =4, TXPin =3;
static const uint32_t GPSBaud =9600;
// Объект TinyGPS ++
TinyGPSPlus gps;
// Последовательное соединение с устройством GPS
SoftwareSerial ss (RXPin, TXPin);
// Для статистики, которая происходит каждые 5 секунд
unsigned long last =0UL;
int ledPin =13;
void setup ()
{
Serial.begin (115200);
ss.begin (GPSBaud);
pinMode (ledPin, OUTPUT);
}
void loop ()
{
// Отправка входящих символов
while (ss.available ()> 0)
gps.encode (ss.read ());
if (gps.location.isUpdated ())
{
Последовательный. print (F ("Lat ="));
Serial.print (gps.location.lat (), 6);
Serial.print (F ("Long ="));
Serial.println (gps.location.lng (), 6);
}
иначе if (millis () - last> 5000)
{
Serial.println ();
if (gps.location.isValid ())
{
// заменяем значения 'Dest_LAT' и 'Dest_LON' базовыми edon ваше местоположение
// вы можете найти широту и долготу из Read_Lat_Lng.ino
static const double Dest_LAT =18.786254, Dest_LON =73.880798;
double distanceToDest =
TinyGPSPlus ::distanceBetween (
gps.location.lat (),
gps.location.lng (),
Dest_LAT,
Dest_LON);
Serial.print (F ("Расстояние до Destination ="));
Serial.print (distanceToDest / 1000, 6); // * Печатает расстояние до пункта назначения
if (distanceToDest / 1000 <0,050000) // Здесь, когда distanceToDest / 1000 меньше 0,050000, загорается светодиод. Поэтому измените * расстояние до пункта назначения в соответствии с вашими требованиями.
{
digitalWrite (ledPin, HIGH);
}
else
{
digitalWrite (ledPin, LOW);
}
}
if (gps.charsProcessed () <10)
Serial.println (F ("ВНИМАНИЕ:нет данных GPS. Проверьте проводку."));
last =millis ();
Serial.println ();
}
} Загрузите код, и на мониторе последовательного порта вы увидите следующее.
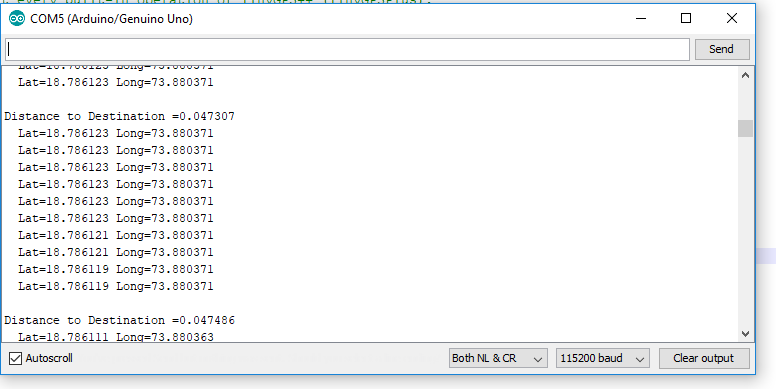
Таким образом, расстояние до пункта назначения можно использовать для определения диапазона, в котором должна выполняться операция вывода (уведомление).
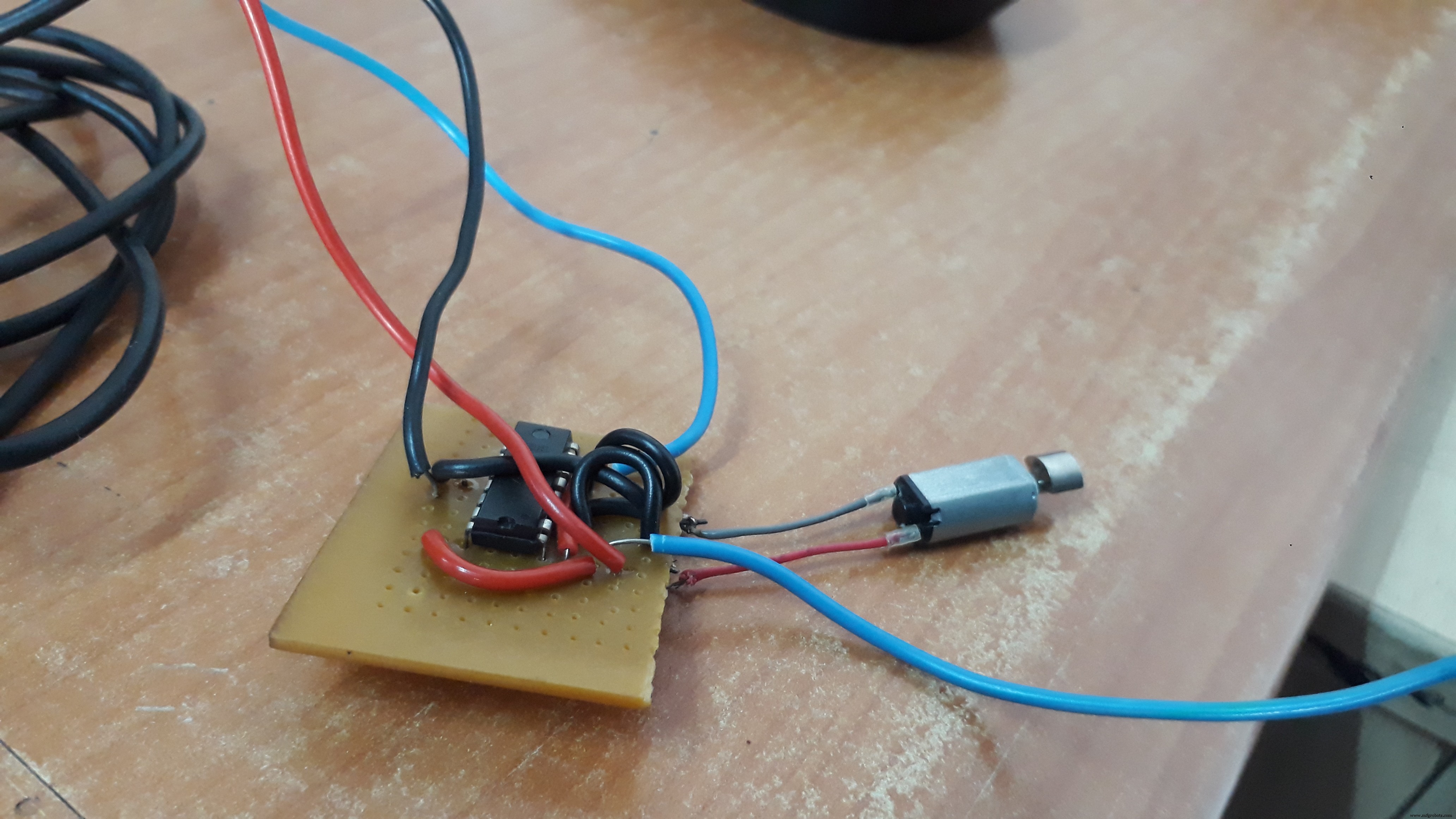
Последний!
Хорошо, мой прототип работал нормально. Теперь я хочу поместить свой проект в коробку, в которую поместятся Arduino, модуль GPS, двигатель с микросхемой драйвера и источник питания 9 В.

Подключение к микросхеме L293D
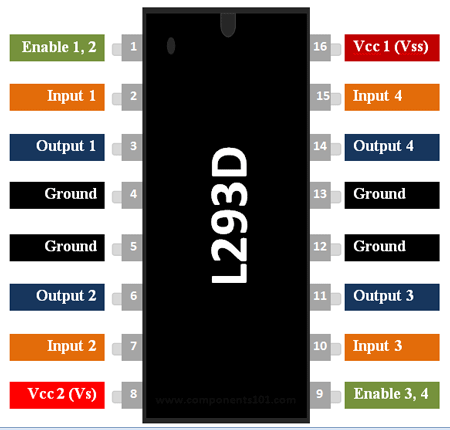
- Подключите 5 В к Enable 1, Vs и Vss на L293D.
- Подключите контакты цифрового выхода (мы используем 6 и 7) к входам 1 и 2 на L293D.
- Подключите GND вашего Arduino к обоим контактам GND на одной стороне L293D
- Наконец, подключите выход 1 и выход 2 L293D к контактам двигателя.
Код:
#include
#include
static const int RXPin =4, TXPin =3;
static const uint32_t GPSBaud =9600;
// Объект TinyGPS ++
TinyGPSPlus gps;
// Последовательное соединение с устройством GPS
SoftwareSerial ss (RXPin, TXPin);
// Для статистики, которая происходит каждые 5 секунд
unsigned long last =0UL;
int motorpin1 =6;
int motorpin2 =7;
void setup ()
{
Последовательный .begin (115200);
ss.begin (GPSBaud);
pinMode (motorpin1, OUTPUT);
pinMode (motorpin2, OUTPUT);
}
void loop ()
{
// Отправка входящих символов
while (ss.available ()> 0)
gps.encode (ss.read ());
если (gps.location.isUpdated ())
{
Serial.print (F ("Lat ="));
Serial.print (gps.location.lat (), 6);
Serial.print (F ("Long ="));
Serial.println (gps.location.lng (), 6);
}
иначе if (millis ( ) - last> 5000)
{
Serial.println ();
if (gps.location.isValid ())
{
// заменяем значения Dest_LAT и Dest_LON в зависимости от вашего местоположения
// вы можете найти широту и долготу из Read_Lat_Lng.ino
static const double Dest_LAT =18.786254, Dest_LON =73.880798;
double distanceToDest =
TinyGPSPlus ::distanceBetween (
gps.location.lat (),
gps.location.lng (),
Dest_LAT,
Dest_LON);
Serial.print (F ("Расстояние до пункта назначения ="));
Serial.print (distanceToDest / 1000, 6); // * Печатает расстояние до пункта назначения
if (distanceToDest / 1000 <0,050000) // Здесь, когда distanceToDest / 1000 меньше 0,050000, загорается светодиод. Поэтому измените * расстояние до пункта назначения в соответствии с вашими требованиями.
{
digitalWrite (motorpin1, LOW);
digitalWrite (motorpin2, HIGH);
}
else
{
digitalWrite (motorpin1, ВЫСОКИЙ);
digitalWrite (motorpin2, HIGH);
}
}
if (gps.charsProcessed () <10)
Serial.println (F ("ВНИМАНИЕ:нет данных GPS. Проверьте проводку."));
last =millis ();
Serial.println ();
}
} Удачи!
Код
- Read_Lat_Lng.ino
- Destination_notifier_LED.ino
- Destination_notifier_motor.ino
Read_Lat_Lng.ino Arduino
#include#include static const int RXPin =4, TXPin =3; static const uint32_t GPSBaud =9600; // Объект TinyGPS ++ TinyGPSPlus gps; // Последовательное подключение к GPS deviceSoftwareSerial SS (RXPin, TXPin); установка void () {Serial.begin (9600); ss.begin (GPSBaud);} void loop () {// Этот скетч отображает информацию каждый раз, когда новое предложение правильно закодировано. в то время как (ss.available ()> 0) {gps.encode (ss.read ()); если (gps.location.isUpdated ()) {Serial.print ("Широта ="); Serial.print (gps.location.lat (), 6); Serial.print ("Долгота ="); Serial.println (gps.location.lng (), 6); }}}
Destination_notifier_LED.ino Arduino
#include#include static const int RXPin =4, TXPin =3; static const uint32_t GPSBaud =9600; // Объект TinyGPS ++ TinyGPSPlus gps; // Последовательное подключение к GPS deviceSoftwareSerial ss (RXPin, TXPin); // Для статистики, которая происходит каждые 5 секунд unsigned long last =0UL; int ledPin =13; void setup () {Serial.begin (115200); ss.begin (GPSBaud); pinMode (ledPin, OUTPUT);} void loop () {// Отправка входящих символов while (ss.available ()> 0) gps.encode (ss.read ()); если (gps.location.isUpdated ()) {Serial.print (F ("Lat =")); Serial.print (gps.location.lat (), 6); Serial.print (F ("Long =")); Serial.println (gps.location.lng (), 6); } иначе, если (millis () - last> 5000) {Serial.println (); if (gps.location.isValid ()) {// замените значения 'Dest_LAT' и 'Dest_LON' в зависимости от вашего местоположения // вы можете найти широту и долготу из Read_Lat_Lng.ino static const double Dest_LAT =18.786254, Dest_LON =73.880798; двойное расстояниеToDest =TinyGPSPlus ::distanceBetween (gps.location.lat (), gps.location.lng (), Dest_LAT, Dest_LON); Serial.print (F ("Расстояние до пункта назначения =")); Serial.print (distanceToDest / 1000, 6); // * Печатает расстояние до пункта назначения if (distanceToDest / 1000 <0,050000) // Здесь, когда distanceToDest / 1000 меньше 0,050000, загорается светодиод. Поэтому измените * расстояние до пункта назначения в соответствии с вашими требованиями. {digitalWrite (ledPin, HIGH); } else {digitalWrite (ledPin, LOW); }} if (gps.charsProcessed () <10) Serial.println (F («ВНИМАНИЕ:нет данных GPS. Проверьте проводку.»)); последний =миллис (); Serial.println (); }}
Destination_notifier_motor.ino Arduino
#include#include static const int RXPin =4, TXPin =3; static const uint32_t GPSBaud =9600; // Объект TinyGPS ++ TinyGPSPlus gps; // Последовательное подключение к GPS deviceSoftwareSerial ss (RXPin, TXPin); // Для статистики, которая происходит каждые 5 секунд unsigned long last =0UL; int motorpin1 =6; int motorpin2 =7; void setup () {Serial.begin (115200); ss.begin (GPSBaud); pinMode (motorpin1, OUTPUT); pinMode (motorpin2, OUTPUT); } void loop () {// Отправка входящих символов while (ss.available ()> 0) gps.encode (ss.read ()); если (gps.location.isUpdated ()) {Serial.print (F ("Lat =")); Serial.print (gps.location.lat (), 6); Serial.print (F ("Long =")); Serial.println (gps.location.lng (), 6); } иначе, если (millis () - last> 5000) {Serial.println (); if (gps.location.isValid ()) {// замените значения 'Dest_LAT' и 'Dest_LON' в зависимости от вашего местоположения // вы можете найти широту и долготу из Read_Lat_Lng.ino static const double Dest_LAT =18.786254, Dest_LON =73.880798; двойное расстояниеToDest =TinyGPSPlus ::distanceBetween (gps.location.lat (), gps.location.lng (), Dest_LAT, Dest_LON); Serial.print (F ("Расстояние до пункта назначения =")); Serial.print (distanceToDest / 1000, 6); // * Печатает расстояние до пункта назначения if (distanceToDest / 1000 <0,050000) // Здесь, когда distanceToDest / 1000 меньше 0,050000, загорается светодиод. Поэтому измените * расстояние до пункта назначения в соответствии с вашими требованиями. {digitalWrite (motorpin1, НИЗКИЙ); digitalWrite (моторпин2, ВЫСОКИЙ); } else {digitalWrite (моторпин1, ВЫСОКИЙ); digitalWrite (моторпин2, ВЫСОКИЙ); }} if (gps.charsProcessed () <10) Serial.println (F («ВНИМАНИЕ:нет данных GPS. Проверьте проводку.»)); последний =миллис (); Serial.println (); }}
Схема
read_lat_lng_l3VSL54w0k.fzz destination_notifier_led_c7qaqTImXg.fzz destination_notifier_motor_fGc8OV6Y0w.fzzПроизводственный процесс
- Цифровые игральные кости Arduino
- Генератор волн JX
- Железный человек
- Найди меня
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Как связать Arduino Mega с GPS-модулем NEO-6M
- Управление увлажнителем Arduino
- u-blox LEA-6H 02 GPS-модуль с Arduino и Python
- NeoMatrix Arduino Pong
- Джойстик Arduino