


Визуализация трехмерного движения датчика IMU
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Прежде чем углубляться в программную часть, давайте соберем наши комплекты оборудования.
Что такое датчик MPU-6050 Устройства MPU-6050 объединяют в себе 3-осевой гироскоп . и 3-осевой акселерометр на том же кремниевом кристалле вместе со встроенным цифровым процессором движения (DMP) , который обрабатывает сложные 6-осевые MotionFusion алгоритмы. Итак, теперь вы сможете расшифровать значение 6ДОФ- 6 степеней свободы.
Подробную информацию о схеме подключения и настройке оборудования см. В моем предыдущем блоге.
Теперь перейдем к программе обработки, которая облегчит 3D-визуализацию этого датчика движения.
Требуется программное обеспечение:
- ProcessingIDE
Учитывая, что вы уже установили ArduinoIDE с двумя отдельными IDE, вы можете немного запутаться. Что ж, не нужно паниковать. Следуйте инструкциям ниже, и все ваши сомнения рассеются!
Обработка очень похожа на ArduinoIDE, за исключением нескольких специализированных функций. Итак, вы увидите влияние / сходство в ProcessingIDE.
Рисунки 1 и 2 прояснят мои утверждения.

Итак, мы видим потрясающее визуальное сходство в обеих этих IDE. Теперь, когда вы установили Processing IDE, вам необходимо загрузить специальную библиотеку под названием «Toxi» для обработки. Поиск файла "Toxi" во всемирной паутине может быть очень беспокойным. Итак, я упростил вам задачу, загрузив его на свой гитхаб. Щелкните по этой ссылке и загрузите файл с именем «xiclibs-complete-0020 ». Затем извлеките папку. Скопируйте "xiclibs-complete-0020 ". папку и вставьте ее в "библиотеки" папка Processing.Не удается найти " папку с библиотеками "? Тогда сделайте один! ага. Если вы не можете найти" библиотеки "папку, создайте папку и назовите ее" библиотеки ". Теперь вставьте свой "xiclibs-complete-0020" внутри нее. Правильно выполнив эти шаги, запустите Processing IDE. Время писать код! Чтобы визуализировать трехмерную визуализацию, вам необходимо сначала загрузить код Arduino для MPU-6050 (извлеките файл .ino из папки MPU6050_DMP6.rar). После этого вам необходимо внести определенные изменения, как показано ниже. Вы должны прокомментировать этот код, в котором говорится:
#define OUTPUT_READABLE_YAWPITCHROLL автор // #define OUTPUT_READABLE_YAWPITCHROLL
аналогичным образом раскомментируйте код, в котором говорится:
// # определяем OUTPUT_TEAPOT автор #define OUTPUT_TEAPOT
Затем откройте пример обработки для MPU-6050. Перейдите на панель инструментов, нажмите Файл -> Открыть. Затем перейдите в папку, в которую вы установили библиотеку MPU-6050 для Arduino. Вы можете легко найти пример обработки:выполните последовательность операций:MPU6050> Примеры> MPU6050_DMP6> Обработка> MPUTeapot. Как и в случае с ArduinoIDE, в этом случае также проверьте последовательный порт, который в нем определен. Теперь проверьте код. Вы увидите, что по умолчанию строка определяет его для linux / mac . пользователи как:
Строка portName ="/ dev / ttyUSB1";
Вам нужно изменить String portName на порт, к которому подключен ваш Arduino. См. Рисунок 3.

Для windows пользователи, прокомментируйте этот код как:
// Строка portName ="/ dev / ttyUSB1";
Аналогичным образом раскомментируйте этот код следующим образом:
// Строка portName ="COM15"; по String portName ="COM15";
Заменить " COM15 "с COM-портом, к которому подключен ваш Arduino (проверьте это, зайдя в Arduino и Инструменты -> Последовательный порт). Итак, наконец, настройка завершена, теперь это всего лишь вопрос нескольких минут! Загрузите код Arduino (MPU6050_DMP6) через Arduino. Примечание. НЕ ОТКРЫВАЙТЕ ПОСЛЕДОВАТЕЛЬНЫЙ МОНИТОР, пока идет процесс. (Почему? Потому что мы будем визуализировать код на ProcessingIDE вместо ArduinoIDE)
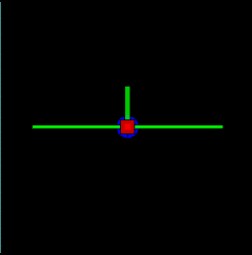
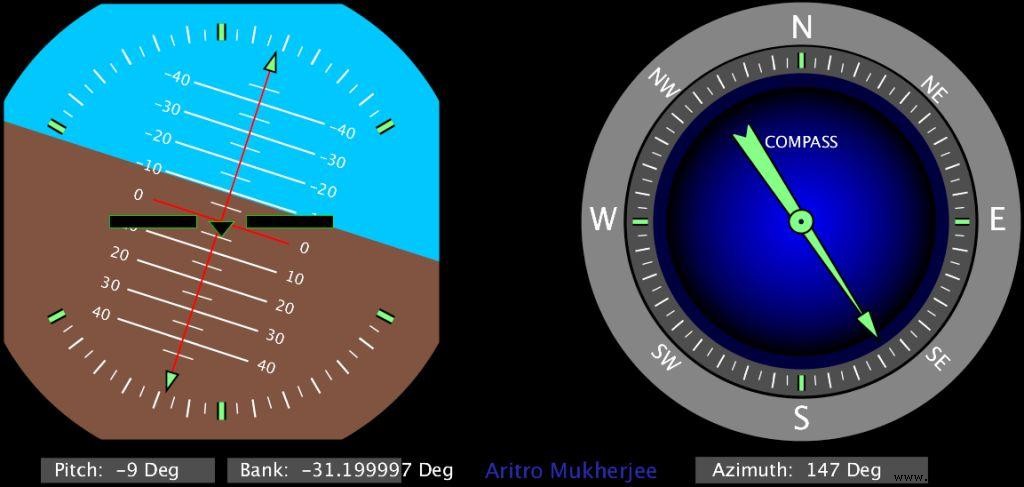
Затем запустите код обработки (MPUTeapot), нажав кнопку с "воспроизвести" . символ. Вы увидите небольшой объект, похожий на самолет. Подождите примерно 10-12 секунд, чтобы значения MPU-6050 стабилизировались. После этого вы увидите, как 3D-модель движется в соответствии с датчиком MPU-6050. Обратитесь к GIF-изображению ниже. Для лучшего понимания перейдите на YouTube
В моем следующем уроке вы можете создать собственные инструменты для симулятора полета.
Пожалуйста, прокомментируйте ниже, если у вас возникнут проблемы с настройкой оборудования / программного обеспечения.
Код
Полный код проекта
Загрузите эту папку и следуйте инструкциям, приведенным в этом руководстве. Https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zipСхема
Следуйте моему предыдущему сообщению в блоге, чтобы получить пошаговое руководство по настройке датчика IMU (MPU-6050) с Arduino. Ссылка (https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066)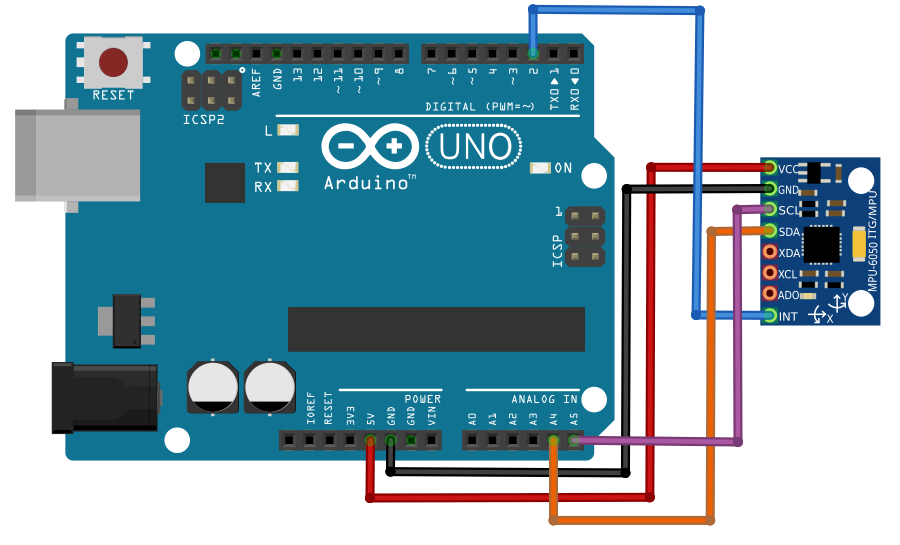
Производственный процесс
- Logic-X запускает новый бренд продуктов для обработки датчиков COTS
- Компьютерное зрение как датчик движения для SmartThings
- Датчик движения, тревога, запись видео в HA на Raspberry Pi
- Самодельная инфракрасная система датчиков движения для Raspberry Pi
- Датчик движения с использованием Raspberry Pi
- Датчик температуры Raspberry Pi
- Raspberry Pi GPIO с датчиком движения PIR:Лучшее руководство
- Взаимодействие датчика движения HC-SR501 PIR с Raspberry Pi
- Датчик эмоций / ЭЭГ
- Электронный датчик кожи расшифровывает движения человека