


Создайте робота для еды с Arduino Nano | Золотой винт
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
|
Приложения и онлайн-сервисы
 |
| |||
 |
|
Об этом проекте
Идея этого проекта принадлежит моей дочери.
Ей нужен робот, и этот робот может открывать рот, чтобы положить в рот еду.
Итак, я поискал в помещении вещи, которые были доступны:картон, Arduino Nano, ультразвуковой датчик, серводвигатель ... чтобы иметь возможность создать робота для девочек, чтобы играть в кратчайшие сроки и с минимально возможными затратами.>
Создать тело
Я использую картон, чтобы сделать тело робота
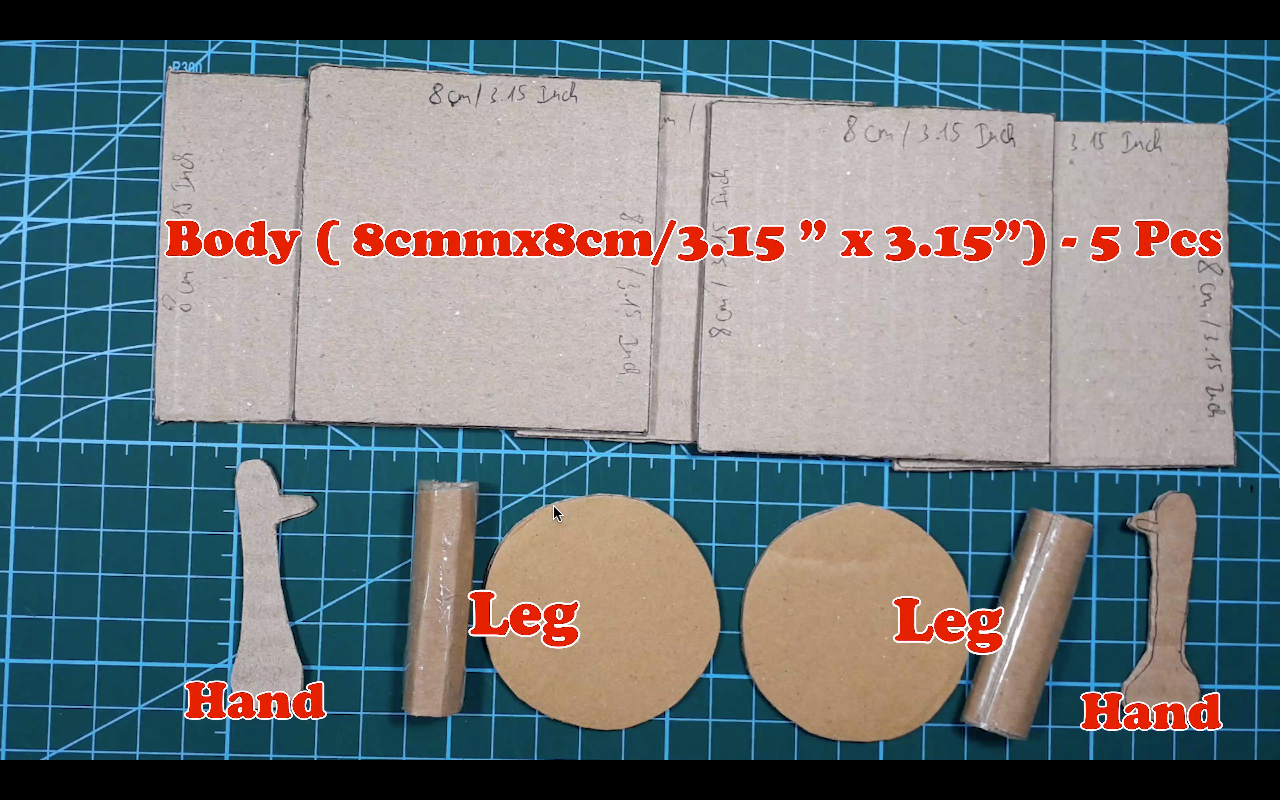
Используя горячий клей, чтобы соединить все части
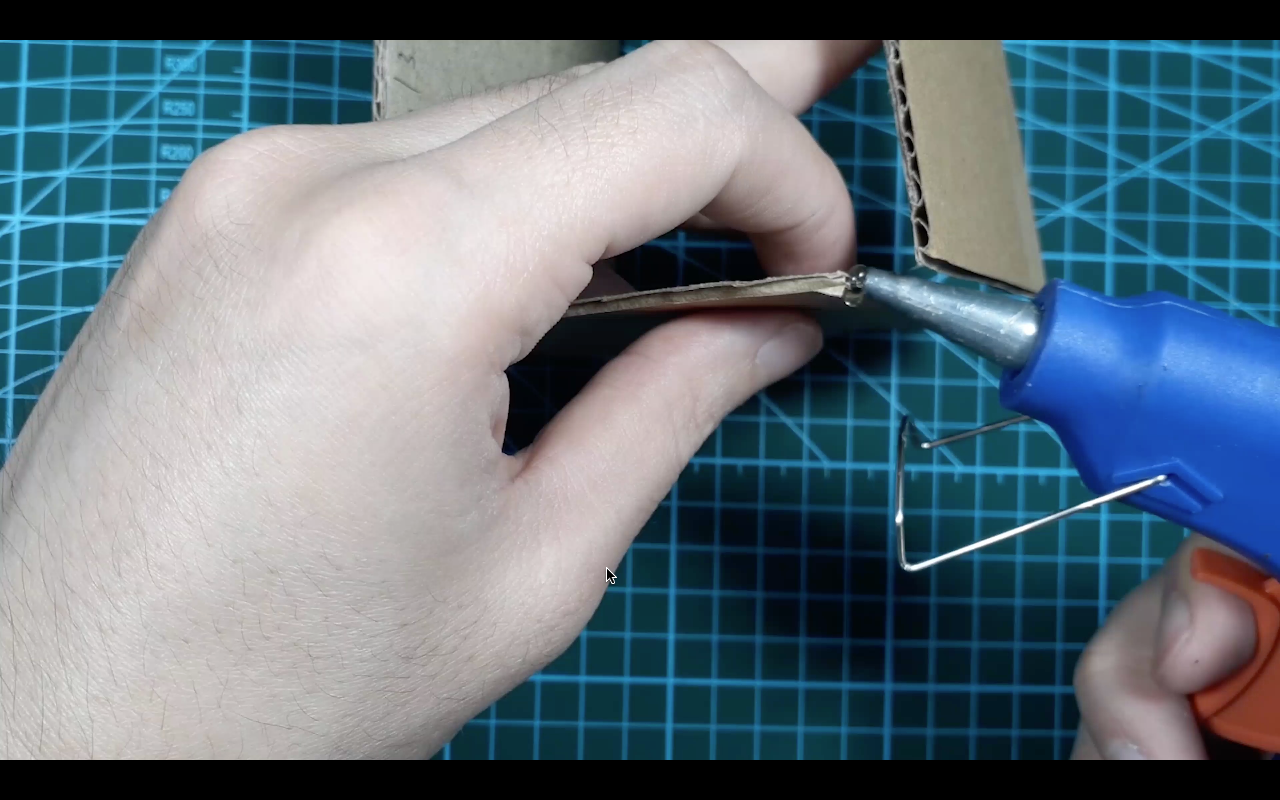
Большая часть тела сделана

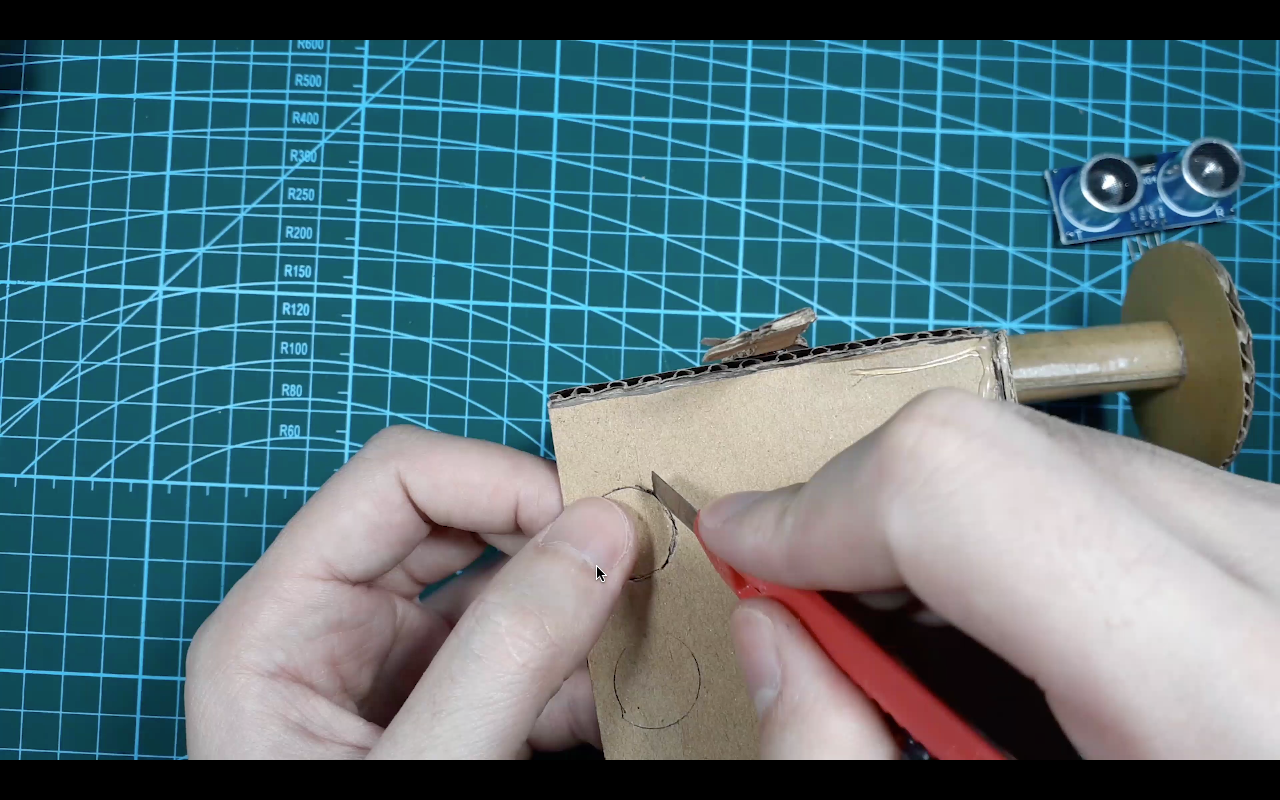
Сделайте отверстия для глаз
Сделать рот
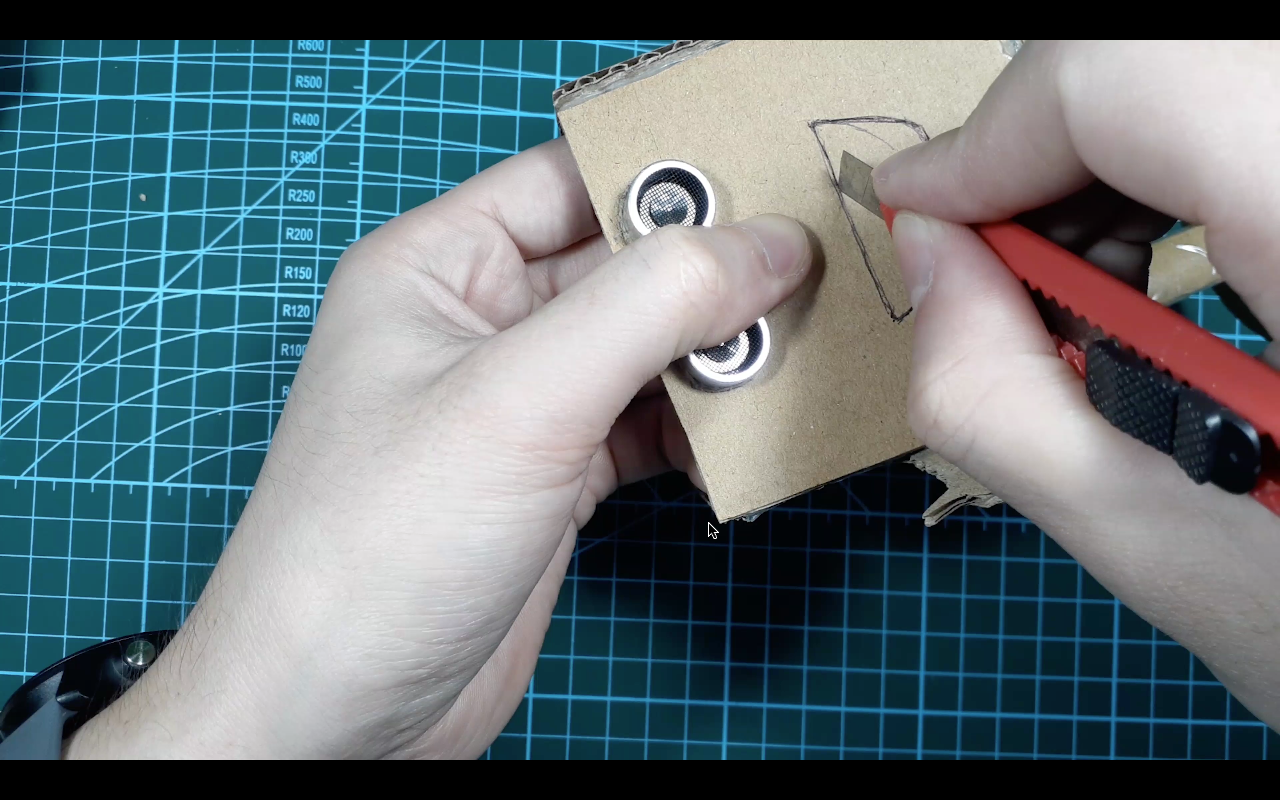
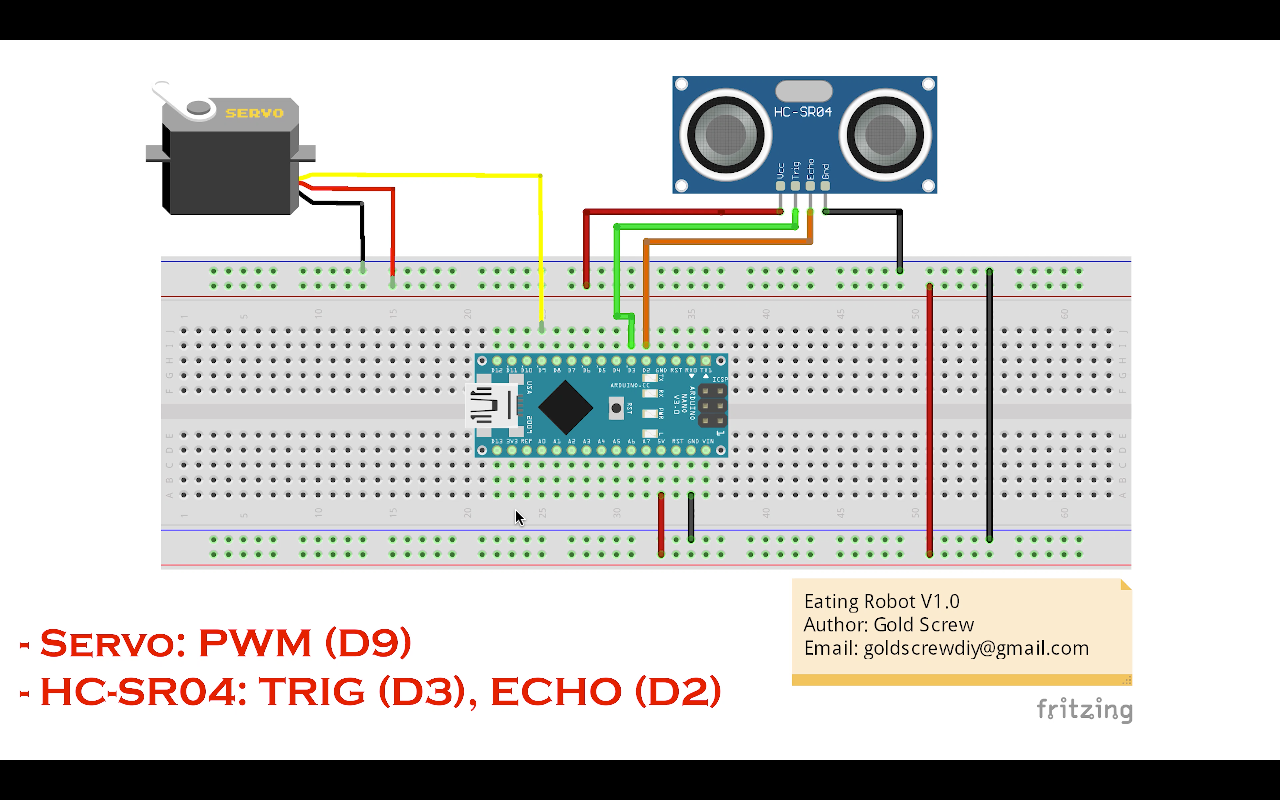
Схема подключения компонентов / деталей
Подключите USB-питание
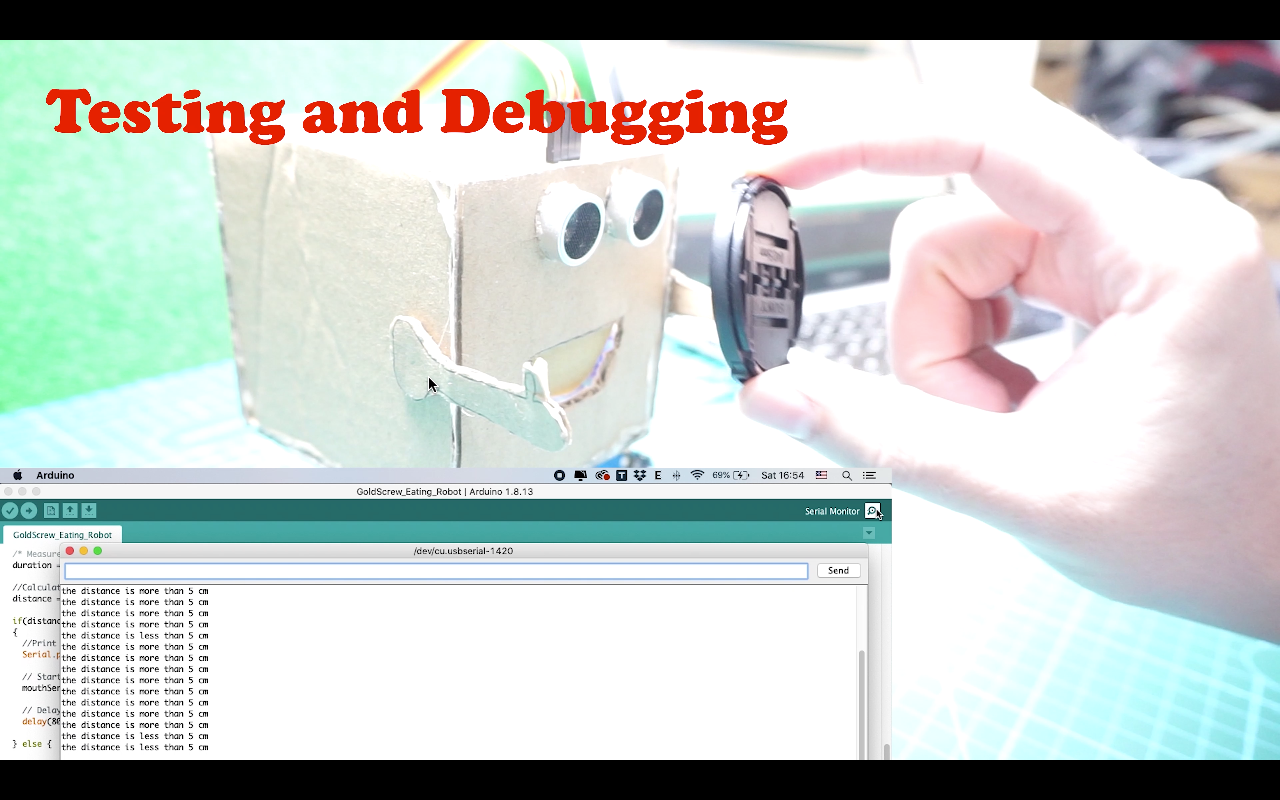
Тестирование и отладка
Готово!

Код
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.ino Arduino
/ * * Робот, поедающий картон * Автор:GoldScrew * Электронная почта:goldscrewdiy@gmail.com * Описание:Он использует HC-SR04 (обнаружение еды на расстоянии <=5 см) и сервер (чтобы открывать и закрывать рот) * / #include#define SERVO_PIN 9 // Установить вывод 9 для сервопривода // ультразвуковой датчик HC-SR04const int trig =3; // триггер HC-SR04const int echo =2; // эхо HC-SR04 // ServoServo MouthServo; void setup () {// Последовательное соединение со скоростью 960 бод Serial.begin (9600); // Отправляем сигнал с TRIG pinMode (trig, OUTPUT); // Получение сигнала с помощью ECHO pinMode (echo, INPUT); // Рот-сервер MouthServo.attach (SERVO_PIN); mouthServo.write (90); } void loop () {/ * Продолжительность * / беззнаковая длительность; int расстояние; // Расстояние / * Отправить сигнал с вывода TRIG * / digitalWrite (trig, 0); // Остановка вывода триггера delayMicroseconds (2); // Задержка 2 микросекунды digitalWrite (trig, 1); // Отправляем сигнал с вывода TRIG delayMicroseconds (10); // Задержка 10 микросекунд digitalWrite (trig, 0); // Остановка вывода триггера / * Измерение HIGH ширины импульса на выводе ECHO * / duration =pulseIn (echo, HIGH); // Вычислить расстояние distance =int (duration / 2 / 29.412); if (distance <=5) {// Распечатать расстояние Serial.println ("расстояние меньше 5 см"); // Запускаем открытый рот mouthServo.write (0); // Задержка задержки (1200); } else {// Распечатать расстояние Serial.println ("расстояние больше 5 см"); // Закрываем рот mouthServo.write (90); } // Задержка задержки (200);}
Схема
Производственный процесс
- Игра с гироскопом Arduino с MPU-6050
- Unopad - MIDI-контроллер Arduino с Ableton
- Робот с сервомотором избегает препятствий
- Простой датчик препятствий с Arduino
- Arduino Nano:управление двумя шаговыми двигателями с помощью джойстика
- Робот-пианино, управляемый Arduino:PiBot
- Портативный счетчик Гейгера с Arduino Nano
- Как создавать музыку с помощью Arduino
- Как сделать автоматическое открывание дверей на базе Arduino
- Управление манипулятором Arduino с помощью приложения для Android