


Двигатель драйвера L293D:как подключить его к двигателю постоянного тока с помощью Arduino
Предположим, вы собираетесь сконструировать робота или игрушечную машинку, знание двигателей имеет первостепенное значение. Очень экономичным и простым способом управления этими двигателями является использование моторного щита драйвера L293D. Еще лучше использовать его в интерфейсе с микроконтроллером, таким как Arduino.
Среди прочих драйвер двигателя L293D является одним из самых популярных чипсетов в своем роде. Более того, из-за его разнообразных применений в электронных сборках, таких как сервоприводы, шаговые двигатели и двигатели постоянного тока. Тем не менее, его важнейшим атрибутом, по-видимому, является управление направлением и скоростью с помощью двух независимых двигателей постоянного тока. Об этом вы узнаете далее в этой инструкции.
1. Что такое драйвер двигателя L293D?
Этот 16-контактный чипсет представляет собой двухканальный драйвер Н-моста для двигателей. Часто его основной функцией является интерфейс управления парами двигателей постоянного тока или одним шаговым двигателем.
По умолчанию набор микросхем драйвера двигателя L293D поставляется парами. Таким образом, он может управлять четырьмя двигателями постоянного тока. По этой причине набор микросхем L293D является ценным компонентом для создания четырехколесных роботов.
Всего щит дает вам четыре Н-моста. Следовательно, каждый h-мост обеспечивает ток двигателя 0,6 А. Кроме того, сдвиговый регистр 74HC595 является функцией безопасности. В результате этот регистр расширяет восемь управляющих контактов двойной микросхемы L293D до четырехразрядных контактов Arduino.

(Четырехкратный сильноточный 16-контактный драйвер двигателя L293D H-моста).
2. Возможности драйвера двигателя l293D
Некоторые функции, которые делают драйвер двигателя L293D таким хорошим компонентом в проектах с ЧПУ и роботами, включают:
- Это позволяет вам управлять уровнями направления и скорости в применяемом устройстве.
- Что еще интереснее, драйвер позволяет запускать два одинаковых двойных двигателя постоянного тока.
- Напряжение двигателя, Вс. (Vcc2) между 4,5 В и 36 В.
- Кроме того, максимальный непрерывный ток двигателя составляет 600 мА.
- С другой стороны, максимальный пиковый ток двигателя составляет 1,2 А.
- Напряжение питания Vss(Vcc1) находится в диапазоне от 4,5 В до 7 В.
- Время перехода составляет не более 300 нс между 5 В и 24 В.
- С помощью термической активации можно включить автоматическое отключение.
- Наконец, микросхема доступна в пакетах SOIC, DIP и TSSOP.
Конфигурация выходных контактов экрана драйвера двигателя 3.L293D
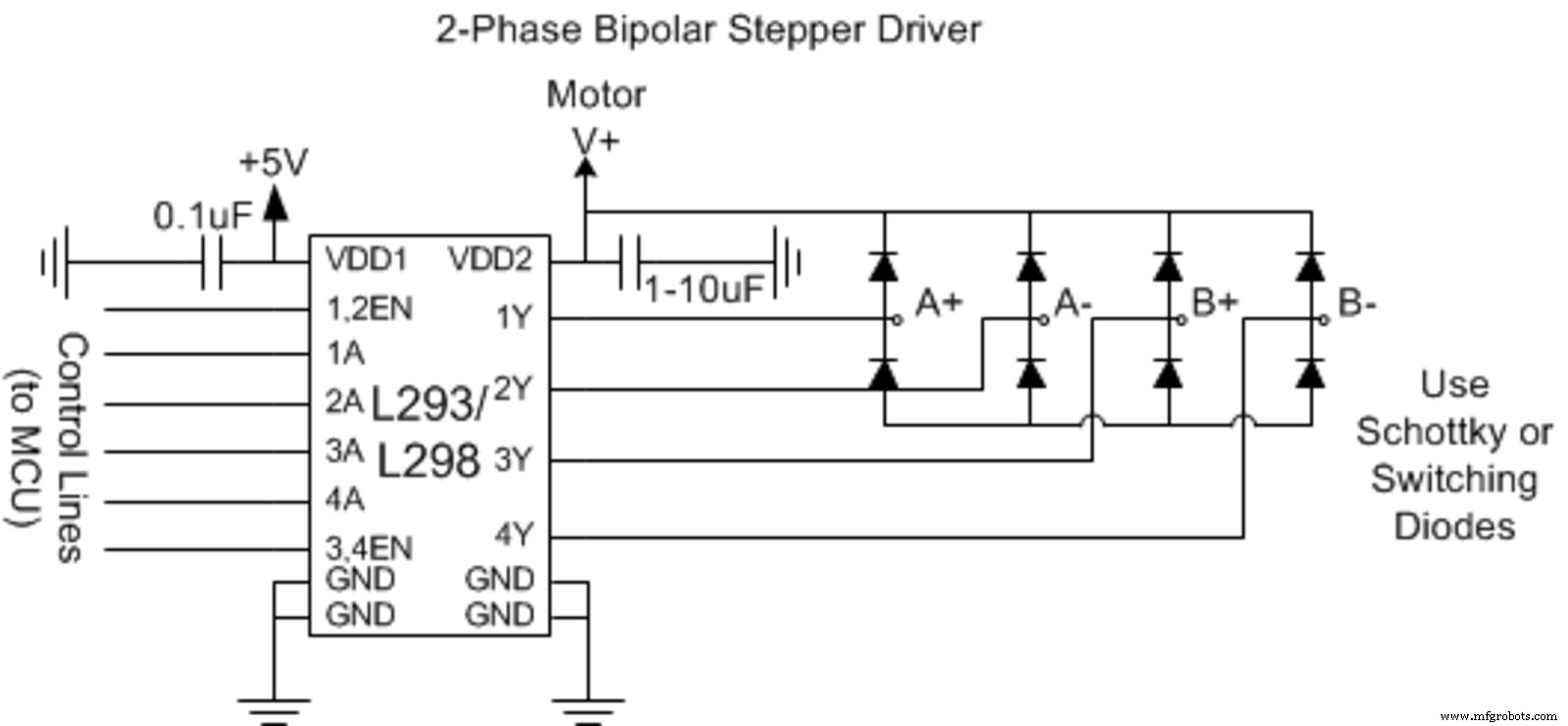
(Схема выводов биполярного драйвера шагового двигателя L293D).
| Пин-код | Название пина | Описание булавки |
| 1 | Включить 1,2 | Этот терминал активирует входные контакты:Вход 1(2) и Вход 2(7). |
| 2 | Входной контакт 1 | Он функционирует как прямое управление выходом 1. Часто вы находите его применимым в управлении цифровыми цепями. |
| 3 | Выходной контакт 1 | Этот контакт подключается к одному концу, к двигателю 1. |
| 4 | Земля | На одном конце этот контакт подключается к земле цепи (0 В). |
| 5 | Земля | У нас есть другой контакт заземления (0 В) на другой стороне. |
| 6 | Выходной контакт 2 | Как и в выходном контакте 1, этот контакт подключается к другому концу двигателя 1. |
| 7 | Входной контакт 2 | Он напрямую управляет контактом Output 2. Он также применим в цифровых схемах управления. |
| 8 | Против. (Vcc2) | С номинальным напряжением 4,5–36 В он подключается к контакту напряжения и питает двигатели. |
| 9 | Включить 3,4 | Этот терминал активирует только входные контакты:Вход 3 (10) и Вход 4 (15). |
| 10 | Ввод 3 | Он предлагает прямое управление контактом Output 3. Кроме того, он функционирует как еще одна цифровая розетка управления цепями. |
| 11 | Вывод 3 | Этот контакт подключается к одному концу двигателя 2. |
| 12 | Земля | Здесь контакт заземления соединяет землю цепи (0 В) |
| 13 | Земля | Еще один контакт заземления, подключенный к земле цепи (0 В) |
| 14 | Вывод 4 | Как и выход 3, этот контакт также подключается к другому концу двигателя 2. |
| 15 | Ввод 4 | С этой стороны он предлагает прямое управление выходом 4. Он также функционирует как цифровое управление цепями. |
| 16 | Vss (Vcc2) | Наконец, контакт подключается к внешнему напряжению +5 В, отвечающему за питание микросхемы. |
4. Принцип работы драйвера двигателя L293D
Как было сказано ранее, драйвер двигателя L293D может управлять двумя двигателями постоянного тока. Следовательно, важно понимать, как работает эта двухканальная микросхема H-моста.
(На схеме показан 5-вольтовый униполярный двигатель, подключенный к L293D).
Первый этап принципа работы включает в себя настройку Н-моста. Другими словами, в нем используются двойные пары транзисторов Дарлингтона, которые мы называем Q2/Q3 и Q1/4. Напротив каждого диод соединяется с коллектором и эмиттером транзисторов. В результате это предотвращает повреждение транзисторов противо-ЭДС, генерируемой двигателем.
Таким образом, когда транзисторы Q1/Q4 открыты, транзисторы Q2/Q3 закрываются. Таким образом, ток течет от Vcc, через двигатель и на землю.
Это действие вызывает вращение двигателя по часовой стрелке/против часовой стрелки. Таким образом, полярность двигателя и способ подключения к источнику питания определяют направление вращения.
С другой стороны, когда транзисторы Q1/Q4 выключены, транзисторы Q2/Q3 включаются автоматически. Таким образом, ток, протекающий через двигатель, меняется в обратном направлении. Таким образом, при протекании этого обратного тока меняется и направление вращения двигателя.
5. Как мы используем драйвер двигателя L293D?
Как упоминалось ранее, драйвер двигателя L293D использует двунаправленный управляющий ток около 600 мА и диапазон 4,5–36 В. Однако эти функции предполагают использование этой 16-контактной микросхемы драйвера двигателя с Arduino Uno.
Поэтому мы представляем проект, который соединяет двигатели постоянного тока и L293D с ARDUINO. Итак, вот пошаговая процедура настройки схемы, которая управляет направлением и скоростью двигателя постоянного тока.
Шаг первый:соберите материалы, необходимые для проекта.
- Два потенциометра 10K.
- Набор микросхем драйвера двигателя L293D.
- Два небольших двигателя постоянного тока.
- Arduino Uno или Arduino Pro Mini.
- Макет.
- Проводные перемычки.
Шаг второй:настройка канала
Соединения, задействованные в этой схеме, довольно просты.
Тем не менее, мы используем видеоруководство, чтобы настроить схему для более точной иллюстрации.
Двигатель часто лучше с другим источником питания вообще. В этом случае мы используем 12V для двигателя. С другой стороны, питание 5 В питает L293D и Arduino.
Примечание. Внешний источник питания подключается к контакту 8 L293D. Соблюдайте меры предосторожности при выполнении этих подключений. В противном случае вы рискуете повредить двигатели.
Шаг третий:код для программирования двигателя постоянного тока
Мы собираемся это сделать, и для этого требуется два основных шага.
Установите библиотеку AFMotor.h.
В первую очередь нам понадобится средство связи с микросхемой L293D. Для этого нам нужно установить библиотеку AFMotor.h.
Эта библиотека позволяет нам выдавать команды, управляющие двигателями постоянного тока, соленоидами и шаговыми двигателями.
Чтобы установить библиотеку AFMotor.h, сначала перейдите к Sketch. Затем найдите «Включить библиотеку», после чего найдите «Управление библиотеками». Менеджер библиотек обновляет список установленных библиотек по мере того, как менеджер библиотек загружает индекс.
После этого используйте поисковый фильтр, чтобы найти «Motor Shield». Среди записей выберите библиотеку Adafruit Motor Shield от Adafruit, затем нажмите «Установить».
Запустите код Arduino
Далее нам нужно запустить приведенный ниже код Arduino:
#include
Двигатель AF_DCMotor(4);
недействительная установка ()
{
//Установить начальную скорость двигателя и остановить
мотор.setSpeed(200);
мотор.запустить(ВЫПУСК);
пустой цикл()
{
uint8_t i;
// Включаем двигатель
motor.run(ВПЕРЕД);
// Ускорение от 0 до максимальной скорости
для (i=0; i<255; i++)
{
мотор.setSpeed (я);
задержка(10);
// Замедление от максимальной скорости до 0
для (i=255; i!=0; i–)
{
мотор.setSpeed (я);
задержка(10);
// Затем измените направление двигателя
motor.run(НАЗАД);
// Ускорение от 0 до максимальной скорости
для (i=0; i<255; i++)
{
мотор.setSpeed (я);
задержка(10);
// Замедление от максимальной скорости до 0
для (i=255; i!=0; i–)
{
мотор.setSpeed (я);
задержка(10);
// Теперь выключаем двигатель
мотор.запустить(ВЫПУСК);
задержка(1000);
Шаг 4. Настройка завершена
На этом этапе настройка схемы своими руками завершена. Теперь у вас есть механизм управления для любого устройства с двигателем постоянного тока, использующего этот чип L293D и микроконтроллер Arduino Uno.
Эквивалентная микросхема двойного таймера 6.L293D
Другие микросхемы, аналогичные L293D, включают ULN2003, SN754410, LB1909MC.
(ИС ULN2003 на печатной плате с помеченными контактами и точками подключения)
7. Приложения L293D
- Он помогает управлять сильноточными светодиодными устройствами.
- Кроме того, он применим в сильноточных двигателях, управляемых цифровыми схемами, таких как роботы.
- Драйвер L293D является неотъемлемой частью шаговых двигателей и двигателей в целом.
- Для использования в модулях управления реле. Следовательно, это делает возможным реле с фиксацией.
Обзор
Существуют и другие различные методы управления двигателями постоянного тока с использованием Arduino несколькими способами. Однако одним из самых простых способов является использование микросхемы драйвера двигателя L293D. ИС L293D позволяет одновременно управлять скоростью и направлением двух отдельных двигателей постоянного тока.
В заключение мы узнали, как настроить и запрограммировать двигатель постоянного тока с помощью этой микросхемы. Но, возможно, вы захотите попробовать свои силы в чем-то более сложном. Для получения дополнительных руководств о том, как это сделать, обратитесь на нашу контактную страницу для получения полного руководства.
Промышленные технологии
- Робототехническая система для обнаружения человека с использованием Arduino Uno
- Чтение PPM-сигнала RC-приемника с использованием Arduino
- Игрушка под управлением Android с использованием Raspberry Motor Shield
- Как измерить массу Земли с помощью Arduino
- Как создать веб-сайт, взаимодействующий с Arduino с помощью PHP
- Самодельная рука робота Arduino - управляемая жестами рук
- Arduino - Рисование через Интернет с помощью контроллера шагового двигателя
- Как работает щеточный двигатель постоянного тока
- Как сделать компас с помощью Arduino и Processing IDE
- Как проверить двигатель постоянного тока