


Управление скоростью двигателя постоянного тока – методы контроля напряжения, реостата и потока
Методы управления скоростью двигателя постоянного тока — управление напряжением, реостатным потоком и потоком последовательных и параллельных двигателей постоянного тока
Двигатель постоянного тока используется для преобразования электроэнергии постоянного тока (DC) в механическую энергию на основе сил, создаваемых магнитными полями. Выходная мощность двигателя представляет собой механическую мощность, выраженную в виде вращения (скорости) вала.
В соответствии с приложениями нам нужно изменить скорость двигателя. Таким образом, преднамеренное изменение скорости известно как управление скоростью двигателя.
Термин "управление скоростью" отличается от "регулирования скорости". Регулирование скорости означает, что скорость вращения вала поддерживается постоянной при изменении нагрузки.
- Похожая публикация: Машина постоянного тока — конструкция, работа, типы и области применения
Уравнение ЭДС двигателя постоянного тока
уравнение ЭДС двигателя постоянного тока приведено ниже:
Eb =PΦNZ / 60A
Где;
- P =количество полюсов.
- Ф =поток на полюс
- N =скорость двигателя (об/мин)
- Z =количество проводников.
- A =количество параллельных путей
После проектирования двигателя количество полюсов (P), количество проводников (Z) и количество параллельных путей (A) изменить нельзя. Таким образом, это фиксированные количества.
Eb ∝ ΦN
Eb =kΦN
Где k =константа пропорциональности
Для двигателя постоянного тока ЭДС также определяется как;
Eb =V – Iа Ра
Где;
- В =напряжение питания.
- Яа =ток якоря
- Rа =Сопротивление якоря
Теперь сравните оба уравнения;
kΦN =V – Ia Ра
k =N =V – Ia Ра / кФ
Из приведенного выше уравнения скорость двигателя зависит от напряжения питания (В), магнитного потока (Φ) и сопротивления якоря (Ra ).
Следовательно, скорость двигателя постоянного тока можно варьировать, изменять и контролировать путем изменения;
- Напряжение на клеммах «V» (также известное как Прикладной метод контроля напряжения ).
- Внешнее сопротивление с сопротивлением якоря Ra (также известный как метод реостатного контроля). ).
- Поток на полюс Φ (также известный как Метод управления потоком ).
Здесь напряжение на клеммах и сопротивление якоря связаны с цепью якоря, а поток на полюс связан с цепью возбуждения.
Итак, методы управления скоростью двигателя постоянного тока классифицируются как;
- Метод управления арматурой
- Метод управления полем
Теперь мы обсудим, как реализовать эти методы для последовательных, параллельных и составных двигателей постоянного тока.
- Похожая статья:Серводвигатель — типы, конструкция, работа, управление и применение
Регулятор скорости двигателя постоянного тока
Управление скоростью двигателя постоянного тока осуществляется методами управления якорем и полем.
Метод контроля сопротивления якоря для двигателей постоянного тока
В этом методе переменный резистор или реостат соединены последовательно с резистором якоря. Принципиальная схема этого метода показана на рисунке ниже.
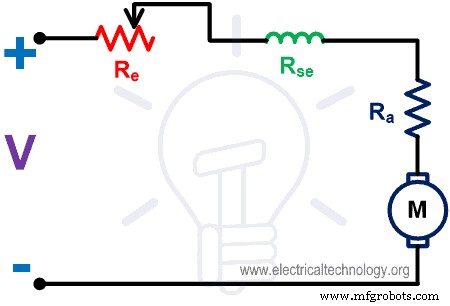
Рис. 1
В последовательном двигателе обмотка якоря соединена последовательно с обмоткой возбуждения. Следовательно, ток якоря и ток возбуждения совпадают.
При изменении сопротивления якоря меняются ток и напряжение якоря. При увеличении значения внешнего сопротивления напряжение на якоре и ток с обмотки якоря уменьшаются. И скорость будет снижена.
С помощью этого метода скорость двигателя уменьшается только от уровня скорости, когда внешнее сопротивление не подключено. Скорость двигателя не может увеличиться с этого уровня.
Здесь внешнее сопротивление подключено последовательно с якорем. Следовательно, полный ток нагрузки будет протекать через внешний резистор. Таким образом, он предназначен для непрерывной работы при полной нагрузке.
Характеристика скорость-ток показана на рисунке ниже.
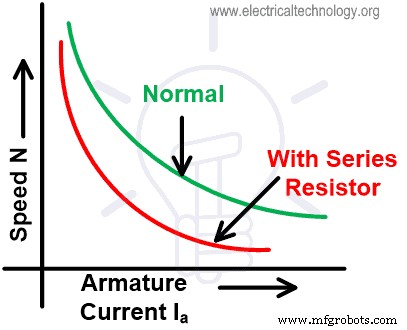
Рис. 2
- Публикация по теме: Бесщеточный двигатель постоянного тока (BLDC) — конструкция, принцип работы и применение
Метод управления напряжением якоря для двигателей постоянного тока
В этом методе скорость регулируется путем изменения напряжения якоря (напряжения питания). В этом методе требуется отдельный источник переменного напряжения.
Скорость двигателя пропорциональна напряжению питания. Таким образом, если напряжение увеличивается, скорость двигателя будет увеличиваться, и наоборот.
Как правило, этот метод не используется. Потому что стоимость переменного блока питания очень высока. Следовательно, этот метод редко используется для контроля скорости.
Метод управления полем для двигателей постоянного тока
Ток поля пропорционален потоку. В этом методе скорость регулируется путем управления током возбуждения. Есть два способа управления током возбуждения;
- Управление переадресацией поля
- Нажатый элемент управления файлами
Управление перенаправлением файлов
В этом методе обмотка последовательного возбуждения подключается параллельно дивертору. Дивертер представляет собой не что иное, как переменный резистор. Некоторые части тока возбуждения будут проходить через дивертер.
Из уравнения скорости двигателя поток обратно пропорционален скорости двигателя. Таким образом, если поток уменьшается, скорость увеличивается.
Меньше значение сопротивления дивертора, меньше ток возбуждения и меньше поток, создаваемый внутри двигателя. Следовательно, скорость двигателя увеличивается.
В этом методе скорость может быть увеличена по сравнению с обычной скоростью. Принципиальная схема этого метода показана на рисунке ниже.
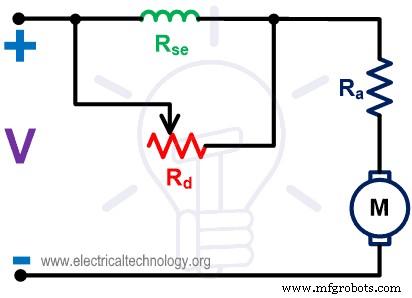
Рис. 3
- Публикация по теме: Шаговый двигатель — типы, конструкция, работа и применение
Контроль поля с касанием
Нажатием на обмотку возбуждения можно выбрать количество витков в обмотке. Выбирая отвод, можно контролировать ток возбуждения.
При большем числе оборотов ток больше, а скорость меньше. При меньшем числе витков ток поля меньше, а скорость больше.
Следовательно, в этом методе скорость можно контролировать, выбирая надлежащие ответвления, предусмотренные на полевой обмотке.
Этот метод используется в электротяге для регулирования скорости привода. Принципиальная схема этого метода показана на рисунке ниже.
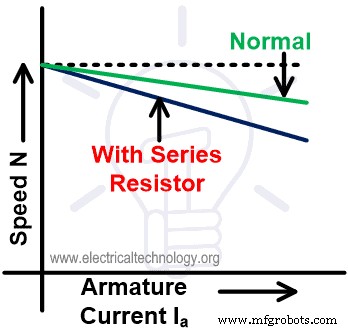
Рис. 4
Управление скоростью шунтирующего двигателя постоянного тока
Методы управления скоростью для двигателя постоянного тока с параллельным подключением аналогичны последовательному двигателю постоянного тока. Методы управления якорем и полем также применимы к шунтирующему двигателю постоянного тока.
- Публикация по теме: Расчет сечения кабеля для двигателей LT и HT
Метод контроля сопротивления якоря шунтирующего двигателя постоянного тока
В этом методе к цепи якоря добавляется внешнее сопротивление. Обмотка возбуждения напрямую связана с источником питания. Следовательно, ток возбуждения останется прежним. Кроме того, поток останется прежним, если внешнее сопротивление будет меняться.
Из уравнения скорости ток якоря пропорционален скорости двигателя. Если значение внешнего сопротивления увеличивается, ток якоря уменьшается. Следовательно, скорость снижается.
Этот метод используется для контроля скорости ниже ее нормального значения. Скорость не может увеличиться больше, чем нормальная скорость. Схема подключения этого метода показана на рисунке ниже.
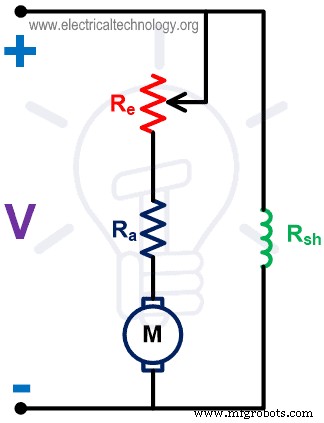
Рис. 5
Характеристика скорость-ток показана на рисунке ниже.
Рис. 6
- Публикация по теме: Однофазный асинхронный двигатель — конструкция, работа, типы и применение
Метод управления полем для шунтирующего двигателя постоянного тока
В шунтирующем двигателе постоянного тока переменный резистор соединен последовательно с шунтирующей обмоткой возбуждения. С помощью этого переменного резистора можно изменять ток возбуждения. Этот переменный резистор также известен как регулятор поля.
Схема подключения этого метода показана на рисунке ниже.
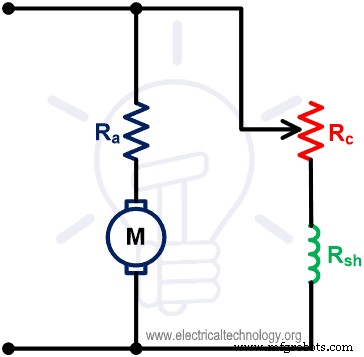
Рис. 7
Из приведенной выше принципиальной схемы уравнение тока шунтирующего поля выглядит так:
При увеличении значения сопротивления ток возбуждения уменьшается и, следовательно, уменьшается поток. Из уравнения скорости поток обратно пропорционален скорости. Таким образом, скорость увеличивается по мере уменьшения потока.
Таким образом, этот метод применим для контроля скорости выше нормальной скорости. В этом методе скорость не может быть ниже нормальной скорости. Скоростно-токовая характеристика этого метода показана на рисунке ниже.
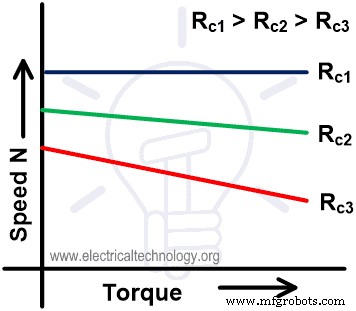
Рис. 8
- Публикация по теме: Трехфазный асинхронный двигатель — конструкция, работа, типы и применение
Метод управления напряжением якоря шунтирующего двигателя постоянного тока
В этом методе обмотка возбуждения питается от постоянного источника. Но обмотка якоря питается от отдельного переменного источника постоянного тока.
Этот метод также известен как метод Уорда-Леонарда. . Схема подключения этого метода показана на рисунке ниже. 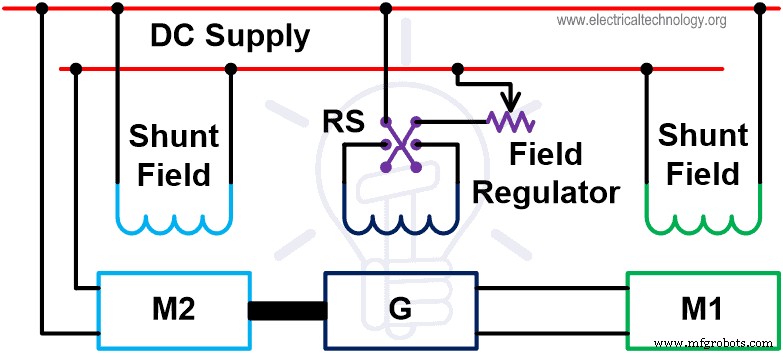
Рис. 9
На приведенной выше диаграмме мы контролируем скорость двигателя M1. Этот двигатель питался от генератора G.
Шунтовая обмотка возбуждения подключена к источнику постоянного тока. Генератор G приводится в движение двигателем М2. Двигатель M2 представляет собой двигатель с постоянной скоростью и питается от источника постоянного тока.
Двигатель M1 начинает вращаться, когда на двигатель подается выходное напряжение генератора G. Скорость двигателя можно контролировать, контролируя выходное напряжение генератора G.
Регулятор поля подключается через генератор к линии питания постоянного тока для управления возбуждением поля.
Управляя напряжением возбуждения генератора, можно регулировать выходное напряжение генератора. И это напряжение будет управлять скоростью двигателя M1.
Переключатель RS является обратным переключателем. Этот переключатель используется для переключения терминала возбуждения поля. Из-за этого ток возбуждения изменится на противоположный, и он будет генерировать противоположное напряжение.
Таким образом, это противоположное напряжение будет изменять скорость двигателя M1. Следовательно, с помощью этого метода двигатель может работать в обоих направлениях. А скорость можно регулировать по обеим сторонам от направления вращения.
- Публикация по теме:что такое двигательная эффективность и как ее повысить?
Преимущества и недостатки метода Уорда Леонарда
Преимущества метода Уорда Леонарда
Преимущества этого метода перечислены ниже;
- Скорость двигателя можно регулировать в широком диапазоне.
- Работа двигателя очень плавная.
- Регулировка скорости двигателя хорошая.
- Мотор может работать с равномерным ускорением.
- Ему присуща отключающая способность.
- Легко изменить направление вращения и скорость можно контролировать в обоих направлениях.
Недостатки метода Уорда Леонарда
Недостатки этого метода перечислены ниже;
- Необходимы две дополнительные машины (двигатель-генератор) с такой же мощностью основного двигателя. Таким образом, общая стоимость такой схемы очень высока.
- Это производит больше шума.
- Требуется частое обслуживание.
- Для установки этого устройства требуется больше места.
- Общая эффективность низкая, если двигатель работает с малой нагрузкой в течение длительного периода времени.
Применение метода Уорда Леонарда
Этот метод используется, когда двигатель должен управляться в широком диапазоне скоростей. Применение двигателя очень чувствительно к скорости, в этом случае этот метод очень полезен.
Этот метод используется в таких приложениях, как; краны, экскаватор, лифт, шахтные подъемники, бумагоделательная машина, сталепрокатные заводы и т. д.
Промышленные технологии
- Связь сигналов
- Разрешающие схемы и схемы блокировки
- Цепи управления двигателем
- Контроль качества - первый шаг к надежности двигателя
- Рост рынка управления низким напряжением
- Кабели двигателя для приводов с регулируемой скоростью
- Типы методов контроля качества, используемых для литья в песчаные формы деталей
- Что определяет скорость гидравлического двигателя
- Как вы управляете скоростью гидравлического двигателя?
- От чего зависит скорость гидравлического двигателя?