


Что такое шаговый двигатель? Типы, конструкция, эксплуатация и применение
Типы шаговых двигателей — их конструкция, работа и применение
Изобретение специальных карт драйверов шаговых двигателей и других технологий цифрового управления для взаимодействия с шаговым двигателем к системам на базе ПК являются причиной широкого распространения шаговых двигателей в последнее время. Шаговые двигатели становятся идеальным выбором для систем автоматизации, которым требуется точное управление скоростью или точное позиционирование, или и то, и другое.
Поскольку мы знаем, что многие промышленные электродвигатели используются с управлением с обратной связью с обратной связью для достижения точного позиционирования или точного управления скоростью, с другой стороны, шаговый двигатель, способный работать на контроллер с открытым контуром. Это, в свою очередь, снижает общую стоимость системы и упрощает конструкцию машины по сравнению с сервосистемой управления. Кратко обсудим шаговый двигатель и его типы. . 
- Публикация по теме:Серводвигатель — типы, конструкция, работа и применение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточное электромеханическое устройство, преобразующее последовательность электрических импульсов, подаваемых на их обмотки возбуждения, в точно определенное пошаговое механическое вращение вала. Вал двигателя поворачивается на фиксированный угол для каждого дискретного импульса. Это вращение может быть линейным или угловым. Он получает одношаговое движение за один входной импульс.
Последовательность импульсов поворачивается на определенный угол. Угол, на который поворачивается вал шагового двигателя для каждого импульса, называется углом шага и обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала двигателя контролируется путем управления количеством импульсов. Благодаря этой уникальной особенности шаговый двигатель хорошо подходит для разомкнутой системы управления, в которой точное положение вала поддерживается за счет точного количества импульсов без использования датчика обратной связи.
Чем меньше угол шага, тем больше будет количество шагов на один оборот и выше будет точность полученного положения. Углы шага могут составлять от 90 градусов до 0,72 градуса, однако обычно используются углы шага 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, подаваемых на статор. Скорость вала или средняя скорость двигателя прямо пропорциональны частоте (частоте входных импульсов) входных импульсов, подаваемых на обмотки возбуждения. Следовательно, при низкой частоте шаговый двигатель вращается ступенчато, а при высокой частоте он непрерывно вращается, как двигатель постоянного тока, за счет инерции.
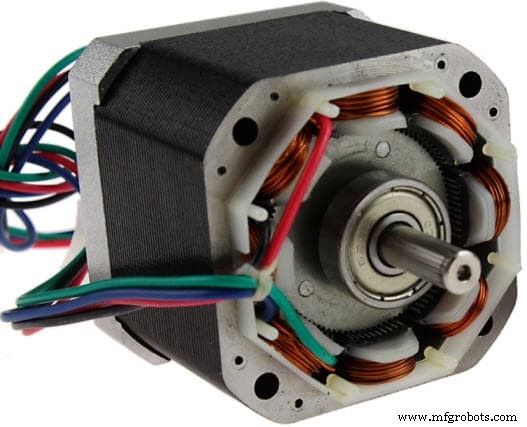
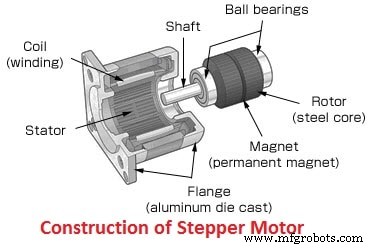
Как и у всех электродвигателей, у него есть статор и ротор. Ротор представляет собой подвижную часть, не имеющую обмоток, щеток и коллектора. Обычно роторы бывают либо с переменным магнитным сопротивлением, либо с постоянными магнитами. Статор часто конструируется с многополюсными и многофазными обмотками, обычно из трех или четырехфазных обмоток, намотанных для необходимого количества полюсов, определяемого желаемым угловым смещением на входной импульс.
В отличие от других двигателей он работает на запрограммированных дискретных управляющих импульсах, которые подаются на обмотки статора через электронный привод. Вращение происходит за счет магнитного взаимодействия между полюсами последовательно возбуждаемой обмотки статора и полюсами ротора.
Существует несколько типов шаговых двигателей. доступны на сегодняшнем рынке в широком диапазоне размеров, количества шагов, конструкций, проводки, зубчатой передачи и других электрических характеристик. Поскольку эти двигатели способны работать в дискретном режиме, они хорошо подходят для взаимодействия с цифровыми устройствами управления, такими как компьютеры.
Благодаря точному управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и инструменты.
- Публикация по теме:Бесщеточный двигатель постоянного тока — конструкция, принцип работы и применение
Типы шаговых двигателей
Существует три основных категории шаговых двигателей. , а именно
- Шаговый двигатель с постоянными магнитами
- Шаговый двигатель с переменным сопротивлением
- Гибридный шаговый двигатель
Во всех этих двигателях обмотки возбуждения используются в статоре, где количество обмоток соответствует количеству фаз.
Постоянное напряжение подается для возбуждения катушек обмоток, и каждый вывод обмотки подключается к источнику через полупроводниковый переключатель. В зависимости от типа шагового двигателя конструкция его ротора может быть выполнена из мягкой стали с выступающими полюсами, цилиндрического ротора с постоянным магнитом и постоянного магнита с зубьями из мягкой стали. Давайте обсудим эти типы подробно.
- Вы также можете прочитать:Подключение трехфазного двигателя по схеме звезда/треугольник (Y-Δ) назад/вперед с питанием по таймеру и схема управления
Шаговый двигатель с переменным сопротивлением
Это основной тип шагового двигателя. который существует уже давно и обеспечивает самый простой способ понять принцип работы со структурной точки зрения. Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами (зубьями) статора и зубьями ротора.

Конструкция шагового двигателя с переменным сопротивлением
Он состоит из статора с обмоткой и многозубчатого ротора из мягкого железа. Статор имеет пакет пластин из кремнистой стали, на которые намотаны обмотки статора. Обычно он намотан на три фазы, которые распределены между парами полюсов.
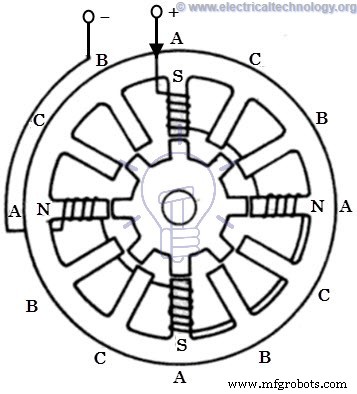
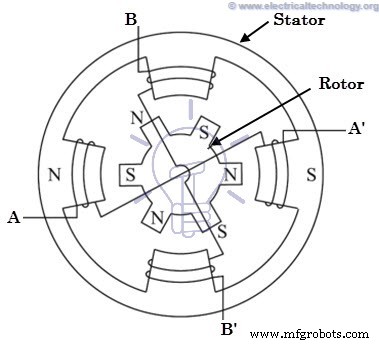
Число полюсов на сформированном статоре равно четному кратному числу фаз, обмотки которых намотаны на статоре. На рисунке ниже статор имеет 12 одинаково расположенных выступающих полюсов, каждый из которых намотан катушкой возбуждения. Эти три фазы питаются от источника постоянного тока с помощью полупроводниковых переключателей.
Ротор не имеет обмоток и представляет собой явнополюсный тип, полностью состоящий из стальных пластин с прорезями. Выступающие зубья полюса ротора имеют ту же ширину, что и зубья статора. Количество полюсов на статоре отличается от количества полюсов ротора, что обеспечивает возможность самозапуска и двунаправленного вращения двигателя.
Отношение полюсов ротора к полюсам статора для трехфазного шагового двигателя задается как Nr =Ns ± (Ns / q). Здесь Ns =12 и q =3, и, следовательно, Nr =12 ± (12 / 3) =16 или 8. Ниже показан 8-полюсный ротор без возбуждения.
Работа шагового двигателя с переменным сопротивлением
Шаговый двигатель работает по принципу что ротор выравнивается в определенном положении с зубьями полюса возбуждения в магнитной цепи, в которой существует минимальный путь сопротивления. Всякий раз, когда на двигатель подается питание и возбуждается определенная обмотка, он создает свое магнитное поле и создает свои собственные магнитные полюса.
Из-за остаточного магнетизма в полюсах магнита ротора это заставит ротор двигаться в таком положении, чтобы достичь положения с минимальным сопротивлением и, следовательно, одного набора полюсов ротора. совпадает с полюсами статора, находящимися под напряжением. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора.
Когда ротор совмещен с полюсами статора, его магнитная сила удерживает вал от перемещения в следующее положение по часовой стрелке или против часовой стрелки.
Рассмотрите принципиальную схему трехфазного двигателя с 6 полюсами статора и 4 зубьями ротора, показанную на рисунке ниже. Когда на фазу А-А’ подается постоянный ток путем замыкания переключателя -1, обмотка становится магнитом, в результате чего один зубец становится северным, а другой — южным. Таким образом, магнитная ось статора проходит вдоль этих полюсов.
Из-за силы притяжения северный полюс катушки статора притягивает ближайший зубец ротора противоположной полярности, т. е. Южный и Южный полюс притягивают ближайший зубец ротора противоположной полярности, т. е. север. Затем ротор настраивается на минимальное сопротивление, при котором магнитная ось ротора точно совпадает с магнитной осью статора.
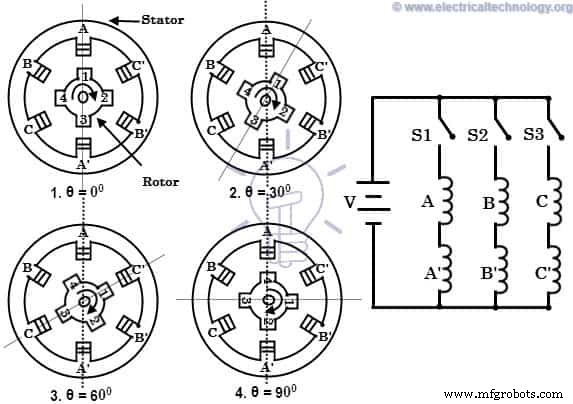
Когда фаза BB' активируется замыкающий переключатель -2, удерживая фазу А-А', остается обесточенной при размыкании переключателя-1, обмотка В-В' будет создавать магнитный поток и, следовательно, магнитная ось статора смещается вдоль образованных ею полюсов. Следовательно, ротор смещается с наименьшим сопротивлением с намагниченными зубьями статора и поворачивается на угол 30 градусов по часовой стрелке.
Когда на переключатель-3 подается питание после размыкания переключателя-2, включается фаза C-C', зубья ротора выравниваются с новым положением, перемещаясь на дополнительный угол 30°. градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора в определенной последовательности. Угол шага этого 3-фазного шагового двигателя с 4-полюсными зубьями ротора выражается как 360/(4 × 3) =30 градусов (угол шага =360/Nr × q).
Угол шага можно еще уменьшить, увеличив количество полюсов на статоре и роторе, в этом случае двигатели часто наматывают с дополнительными фазными обмотками. Этого также можно добиться, применив другуюконструкцию шаговых двигателей. такие как многоуровневое расположение и редукторный механизм.
- Вы также можете прочитать:Подключение трехфазного двигателя по схеме ЗВЕЗДА/ТРЕУГОЛЬНИК без таймера Схемы питания и управления
Шаговый двигатель с постоянными магнитами
Двигатели с постоянными магнитами, возможно, являются наиболее распространенными среди нескольких типов шаговых двигателей. Как следует из названия, он добавляет в конструкцию двигателя постоянные магниты. Этот тип шаговых двигателей также называется двигатель с стеком. или мотор из консервной банки . Основным преимуществом этого двигателя является его низкая стоимость изготовления. Этот тип двигателя имеет 48-24 шага на оборот.

Шаговый двигатель с постоянными магнитами
В этом двигателе статор является многополярным, и его конструкция аналогична конструкции шагового двигателя с переменным сопротивлением, как обсуждалось выше. Он состоит из щелевой периферии, на которую намотаны катушки статора. Он имеет выступающие полюса на щелевой конструкции, где намотанные обмотки могут быть двух-, трех- или четырехфазными.
Концевые клеммы всех этих обмоток выкуплены и подключены к возбуждению постоянного тока через полупроводниковые переключатели в цепи привода.
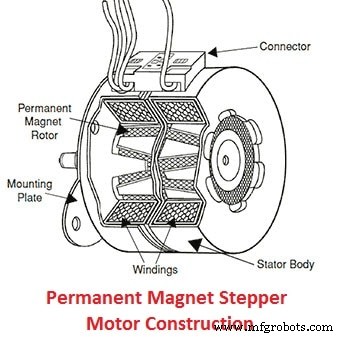
Ротор изготовлен из материала с постоянными магнитами. как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно он имеет гладкую цилиндрическую форму. Ротор имеет четное число постоянных магнитных полюсов с чередующимися северной и южной полярностью.
Работа шагового двигателя с постоянными магнитами
Работа этого мотора основана на том, что разноименные полюса притягиваются друг к другу, а одноименные отталкиваются. Когда обмотки статора возбуждаются от источника постоянного тока, он создает магнитный поток и устанавливает северный и южный полюса. За счет силы притяжения и отталкивания между полюсами ротора с постоянными магнитами и полюсами статора ротор начинает перемещаться до положения, при котором на статор подаются импульсы.
Рассмотрите двухфазный шаговый двигатель с двумя полюсами ротора с постоянными магнитами, как показано на рисунке ниже.
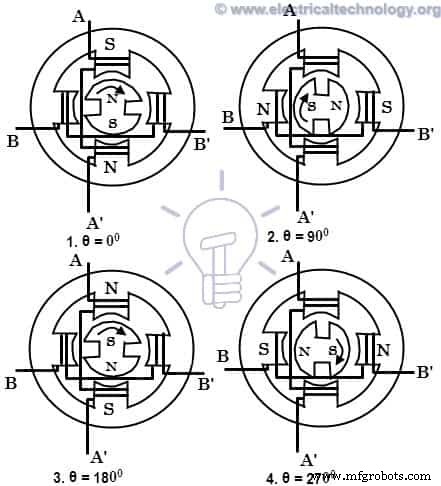
Когда на фазу A подается положительное напряжение с относительно A' обмотки устанавливают северный и южный полюса. Из-за силы притяжения полюса ротора совпадают с полюсами статора, так что ось магнитного полюса ротора совмещается с осью магнитного полюса статора, как показано на рисунке.
Когда возбуждение переключается на фазу B и отключается фаза A, ротор дополнительно подстраивается под магнитную ось фазы B и таким образом поворачивается на 90 градусов по часовой стрелке.
Далее, если на фазу A подается отрицательный ток по отношению к A', формирование полюсов статора заставляет ротор двигаться еще на 90 градусов по часовой стрелке.
Точно так же, если фаза B возбуждается отрицательным током при замыкании переключателя фазы A, ротор поворачивается еще на 90 градусов в том же направлении. Далее, если фаза А возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов. Это означает, что всякий раз, когда статор возбуждается, ротор стремится повернуться на 90 градусов по часовой стрелке.
Угол шага этого 2-фазного 2-полюсного двигателя с ротором на постоянных магнитах выражается как 360/(2 × 2) =90 градусов. Размер шага может быть уменьшен за счет одновременного включения двух фаз или последовательного включения режимов 1-фазного и 2-фазного включения с соблюдением полярности.
- Вы также можете прочитать:Термины и определения, относящиеся к контролю и защите двигателя
Гибридный шаговый двигатель
Это самый популярный тип шагового двигателя. поскольку он обеспечивает лучшую производительность, чем ротор с постоянными магнитами, с точки зрения шагового разрешения, удерживающего момента и скорости. Однако эти двигатели дороже, чем шаговые двигатели с постоянными магнитами. Он сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в приложениях, требующих очень малого шагового угла, например 1,5, 1,8 и 2,5 градуса.

Конструкция гибридного шагового двигателя
Статор этого двигателя такой же, как у его аналога с постоянными магнитами или реактивного сопротивления. Катушки статора намотаны на чередующихся полюсах. При этом катушки разных фаз наматываются на каждый полюс, обычно две катушки на полюс, что называется бифилярным соединением.
Ротор состоит из постоянного магнита, который намагничивается в осевом направлении, образуя пару магнитных полюсов (полюса N и S). Каждый полюс покрыт равномерно расположенными зубьями. Зубья состоят из мягкой стали и двух секций, из которых на каждом полюсе смещены друг относительно друга на половину шага зубьев.
- Публикация по теме Почему мощность электродвигателей измеряется в кВт, а не в кВА?
Работа гибридного шагового двигателя
Этот двигатель работает аналогично шаговому двигателю с постоянными магнитами. На рисунке выше показан 2-фазный, 4-полюсный, гибридный шаговый двигатель с 6-зубчатым ротором. Когда фаза AA' возбуждается источником постоянного тока, оставляя BB' невозбужденным, ротор выравнивается таким образом, что южный полюс ротора обращен к северному полюсу статора, а северный полюс ротора обращен к южному полюсу статора.
Теперь, если фаза B-B' возбуждается, удерживая А-А' выключенным таким образом, что верхний полюс становится северным, а нижний становится южным, тогда ротор выровняется в новое положение, двигаясь против часовой стрелки. Если фаза B-B' возбуждена противоположно, так что верхний полюс становится южным, а нижний становится северным, то ротор будет вращаться по часовой стрелке.
При правильной последовательности импульсов на статоре двигатель будет вращаться в нужном направлении. При каждом возбуждении ротор будет блокироваться в новом положении, и даже если возбуждение будет удалено, двигатель все еще сохраняет свое заблокированное состояние из-за возбуждения от постоянного магнита. Угол шага этого 2-фазного, 4-полюсного, 6-зубчатого роторного двигателя равен 360/(2 × 6) =30 градусов. На практике гибридные двигатели имеют большее количество полюсов ротора, чтобы получить высокое угловое разрешение.
- Публикация по теме:Что такое КПД двигателя и как его повысить?
Униполярные и биполярные шаговые двигатели
Обсуждаемые выше двигатели могут быть униполярными или биполярными в зависимости от схемы обмотки катушки. Униполярный двигатель используется с двумя обмотками на фазу, и, следовательно, направление тока, протекающего через эти обмотки, изменяет вращение двигателя. В этой конфигурации ток протекает в одном направлении в одной катушке и в противоположном направлении в другой катушке.
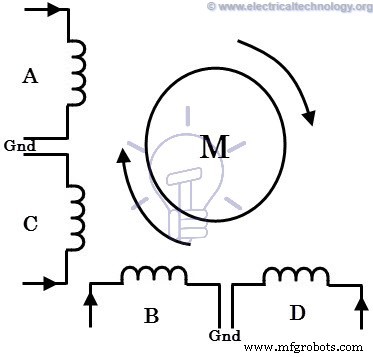
На рисунке ниже показан двухфазный униполярный шаговый двигатель, в котором катушки A и C относятся к одной фазе, а B и D — к другой фазе. В каждой фазе каждая катушка несет ток в направлении, противоположном направлению другой катушки. Только одна катушка будет проводить ток в каждый момент времени в каждой фазе для достижения определенного направления вращения. Таким образом, просто переключая клеммы на каждую катушку, можно контролировать направление вращения.
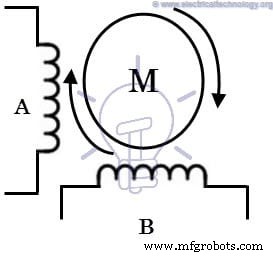
В случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не из двух в случае униполярного. При этом направление вращения контролируется реверсированием тока через обмотки. Следовательно, требуется сложная схема привода для реверсирования тока.
- Вы также можете прочитать:Что такое соленоид и магнитное поле соленоида
Шаговые режимы шагового двигателя
Типичное пошаговое действие заставляет двигатель проходить последовательность положений равновесия в ответ на подаваемые на него импульсы тока. Шаговое действие можно изменять по-разному, просто изменяя последовательность подачи питания на обмотки статора. Ниже приведены наиболее распространенные режимы работы или вождения шаговых двигателей.
- Шаг волны
- Полный шаг
- Полушаг
- Микрошаг
Режим шага волны
Пошаговый режим волны — самый простой из всех других режимов, в котором в любой момент времени подается питание только на одну обмотку. Каждая катушка фазы подключается к питанию попеременно. В таблице ниже показан порядок подачи питания на катушки в 4-фазном шаговом двигателе.
В этом режиме двигатель обеспечивает максимальный угол шага по сравнению со всеми другими режимами. Это самый простой и наиболее часто используемый способ степпинга; однако создаваемый крутящий момент меньше, поскольку он использует некоторую часть общей обмотки в данный момент времени. 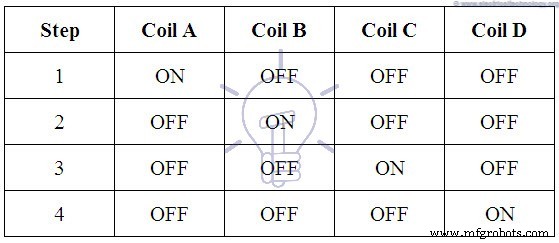
Полный пошаговый режим
В этом приводе или режиме две фазы статора находятся под напряжением одновременно в любой момент времени. Когда две фазы находятся под напряжением вместе, ротор будет испытывать крутящий момент от обеих фаз и придет в положение равновесия, которое будет чередоваться между двумя соседними положениями ступеней волны или однофазными возбуждениями. Таким образом, этот шаг обеспечивает лучший удерживающий момент, чем волновой шаг. В таблице ниже показан полный шаговый привод для 4-фазного шагового двигателя. 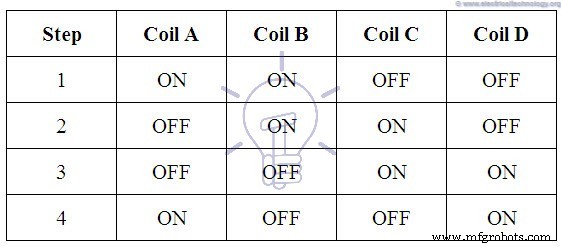
Полушаговый режим
Это комбинация режимов волны и полного шага. При этом однофазное и двухфазное возбуждения осуществляются попеременно, т. е. однофазное включение, двухфазное включение и т. д. Угол шага в этом режиме становится половиной полного угла шага. Этот режим движения имеет самый высокий крутящий момент и стабильность по сравнению со всеми другими режимами. Таблица, содержащая последовательность импульсов фаз для 4-фазного двигателя в полушаге, приведена ниже. 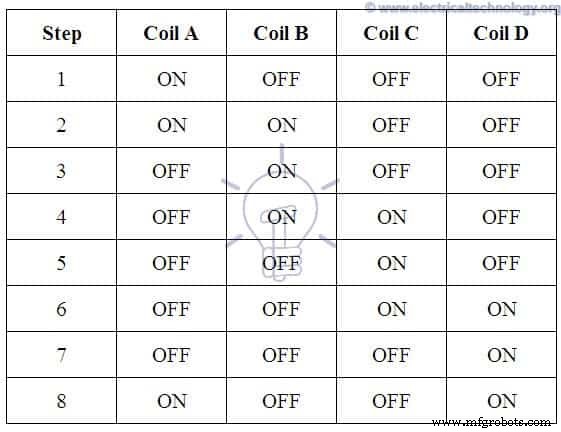
Микрошаговый режим
В этом режиме каждый шаг двигателя подразделяется на несколько небольших шагов, даже сотни фиксированных положений, поэтому достигается большее разрешение позиционирования. При этом токи через обмотки постоянно меняются, чтобы получить очень маленькие ступени. При этом две фазы возбуждаются одновременно, но с неравными токами в каждой фазе.
Например, ток в фазе -1 поддерживается постоянным, в то время как ток в фазе 2 увеличивается поэтапно до максимального значения тока, независимо от того, положительное оно или отрицательное. Затем ток в фазе-1 постепенно уменьшается или увеличивается до нуля. Таким образом, двигатель будет производить небольшой размер шага.
Все эти режимы шагового двигателя могут быть получены каждым типом шагового двигателя, рассмотренным выше. Однако направление тока в каждой обмотке на этих этапах может варьироваться в зависимости от типа двигателя и может быть однополярным или двухполярным.
- Похожая статья Расчет размера кабеля для двигателей LT и HT
Преимущества шагового двигателя
- В состоянии покоя двигатель имеет полный крутящий момент. Независимо от того, нет ли момента или изменения положения.
- Хорошо реагирует на начальное, остановочное и обратное положение.
- Поскольку в шаговом двигателе нет контактных щеток, он надежен, а ожидаемый срок службы зависит от подшипников двигателя.
- Угол поворота двигателя прямо пропорционален входным сигналам.
- Управление простым и менее затратным, поскольку двигатель обеспечивает управление без обратной связи при реагировании на цифровые входные сигналы.
- Скорость двигателя прямо пропорциональна частоте входных импульсов, что позволяет достичь широкого диапазона скорости вращения.
- Когда к валу присоединена нагрузка, по-прежнему возможно реализовать синхронное вращение с низкой скоростью.
- Точное позиционирование и повторяемость движения хороши, так как точность шага составляет 3–5 %, при этом ошибка не накапливается от одного шага к другому.
- Шаговые двигатели более безопасны и недороги (по сравнению с серводвигателями), имеют высокий крутящий момент на низких скоростях, высокую надежность и простую конструкцию, которая работает в любых условиях.
Недостатки шаговых двигателей
- Шаговые двигатели с низким КПД.
- Низкая точность.
- Его крутящий момент очень быстро падает со скоростью.
- Поскольку шаговый двигатель работает в режиме управления без обратной связи, обратной связи, указывающей на возможные пропущенные шаги, нет.
- У него низкое отношение крутящего момента к моменту инерции, что означает, что он не может быстро разогнать груз.
- Они шумные.
Применение шаговых двигателей
- Шаговые двигатели используются в автоматизированном производственном оборудовании, автомобильных измерительных приборах и промышленных машинах, таких как упаковка, маркировка, наполнение и резка и т. д.
- Он широко используется в устройствах безопасности, таких как камеры безопасности и наблюдения.
- В медицинской промышленности шаговые двигатели широко используются в образцах, цифровой стоматологической фотографии, респираторах, жидкостных насосах, оборудовании для анализа крови, медицинских сканерах и т. д.
- Они используются в бытовой электронике, в сканерах изображений, фотокопировальных машинах и печатных машинах, а также в цифровых камерах для функций и положений автоматического масштабирования и фокусировки.
- Шаговые двигатели также используются в лифтах, конвейерных лентах и разветвителях.
Вы также можете прочитать:
- Приводы постоянного тока — конструкция, работа и классификация электрических приводов постоянного тока
- Схемы питания и управления трехфазным двигателем
- Библиотека электродвигателей (переменного и постоянного тока)
Промышленные технологии
- Что такое 3D-печать? Принцип работы | Типы | Приложения
- Что такое штамповка? - Типы, операции и применение
- Что такое токарная обработка? - Определение и виды операций
- Что такое сварка? - Определение | Виды сварки
- Что такое кастинг? - Определение| Виды литья
- Что такое отбойные молотки? - Типы, конструкция и работа
- Для чего используется монель?
- Каковы различные типы конструкции подвала?
- Что такое Strongback?
- Что такое линейный двигатель?