


Введение в регистры сдвига
Регистры сдвига, как и счетчики, представляют собой форму последовательной логики .
Последовательная логика, в отличие от комбинационной, зависит не только от текущих входных данных, но и от предшествующей истории.
Другими словами, последовательная логика запоминает прошлые события.
Регистры сдвига создают дискретную задержку цифрового сигнала или формы волны.
Сигнал, синхронизированный с часами , повторяющаяся прямоугольная волна, задерживается на «n» дискретные часы, где «n» - количество ступеней регистра сдвига.
Таким образом, четырехступенчатый регистр сдвига задерживает «вход данных» на четыре такта до «выхода данных».
Этапы сдвигового регистра - это этапы задержки . , обычно набирают “D” Вьетнамки или введите «JK» Вьетнамки.
Раньше в качестве цифровой памяти использовались очень длинные (несколько сотен ступеней) регистры сдвига.
Это устаревшее приложение напоминает ртутные акустические линии задержки, которые использовались в качестве ранней компьютерной памяти.
При последовательной передаче данных на расстояние от метров до километров используются регистры сдвига для преобразования параллельных данных в последовательную форму.
Последовательная передача данных заменяет множество медленных параллельных проводов данных одной последовательной высокоскоростной цепью.
Последовательные данные на более коротких расстояниях в десятки сантиметров используют регистры сдвига для передачи данных в микропроцессоры и из них.
Многочисленные периферийные устройства, включая аналого-цифровые преобразователи, цифро-аналоговые преобразователи, драйверы дисплея и память, используют регистры сдвига, чтобы уменьшить количество проводов на печатных платах.
Некоторые специализированные схемы счетчиков фактически используют регистры сдвига для генерации повторяющихся сигналов.
Более длинные регистры сдвига с помощью обратной связи генерируют шаблоны настолько длинные, что они выглядят как случайный шум, псевдошум .
Базовые регистры сдвига классифицируются по структуре в соответствии со следующими типами:
- Последовательный вход / серийный выход
- Параллельный вход / последовательный выход
- Последовательный вход / параллельный выход
- Универсальный параллельный вход / параллельный выход
- Счетчик звонков
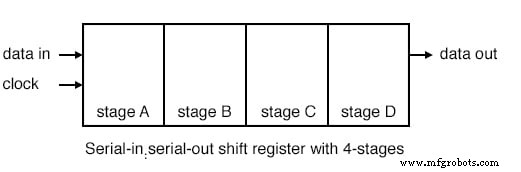
Выше мы показываем блок-схему сдвигового регистра последовательного ввода / вывода, состоящего из 4 этапов.
Данные на входе будут задержаны на четыре периода тактов от входа до выхода регистра сдвига.
Данные в «data in» выше будут присутствовать на этапе A . выход после первого тактового импульса. После второй импульсной ступени A данные передаются на этап B вывод, а «данные в» передаются на этап A вывод. После третьих часов этап C заменяется этапом B ; этап B заменяется этапом A ; а этап А заменяется на «данные в».
После четвертого такта данные, изначально присутствующие в «data in», находятся на этапе D . , «Вывод».
Данные «первым поступили» - это данные «первым обслужи- ваем», поскольку они сдвинуты с «данные на входе» на «данные на выходе».
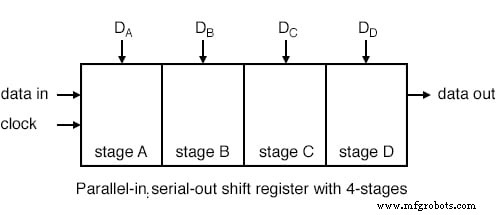
Данные загружаются сразу во все каскады сдвигового регистра с параллельным входом / последовательным выходом.
Затем данные сдвигаются посредством «вывода данных» тактовыми импульсами. Поскольку выше показан четырехступенчатый регистр сдвига, для сдвига всех данных требуется четыре тактовых импульса.
На диаграмме выше этап D данные будут присутствовать на «выходе данных» до первого тактового импульса; этап C данные будут присутствовать на «выходе данных» между первым тактовым импульсом и вторым тактовым импульсом; этап B данные будут присутствовать между вторыми и третьими часами; и этап A данные будут присутствовать между третьим и четвертым часами.
После четвертого тактового импульса и после этого последовательные биты «входящие данные» должны появляться в «выходных данных» сдвигового регистра после задержки в четыре тактовых импульса.
Если четыре коммутатора были подключены к D A через D D , статус может быть считан в микропроцессор, используя только один вывод данных и вывод часов.
Поскольку добавление дополнительных переключателей не потребует дополнительных контактов, этот подход выглядит привлекательным для многих входов.
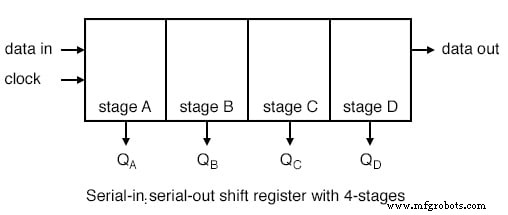
Выше четыре бита данных будут сдвинуты из «data in» на четыре тактовых импульса и будут доступны в Q A через Q D для управления внешними цепями, такими как светодиоды, лампы, драйверы реле и звуковые сигналы. После первых часов данные в «data in» появятся в Q A .
После вторых часов старый Q A данные отображаются в Q B ; Q A получает следующие данные из «данных в». После третьих часов Q B данные находятся в Q C .
После четвертых часов Q C данные находятся в Q D . Этот этап содержит данные, сначала присутствующие в «data in». Регистр сдвига теперь должен содержать четыре бита данных.
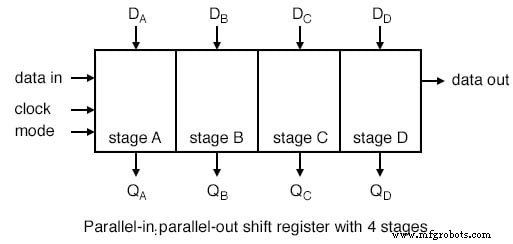
Регистр сдвига с параллельным входом и выходом сочетает в себе функцию регистра сдвига с параллельным входом и выходом с функцией сдвигового регистра с последовательным входом и параллельным выходом, что дает универсальный сдвиговый регистр.
Переключатель «делать что угодно» имеет свою цену - увеличенное количество контактов ввода / вывода может уменьшить количество ступеней, которые можно упаковать.
Данные представлены в D A через D D параллельно загружается в регистры.
Эти данные на Q A через Q D может быть сдвинут на количество импульсов, подаваемых на тактовый вход.
Сдвинутые данные доступны в Q A через Q D .
Вход «режим», который может быть более чем одним входом, управляет параллельной загрузкой данных из D A через D D , смещение данных и направление смещения.
Есть регистры сдвига, которые сдвигают данные влево или вправо.
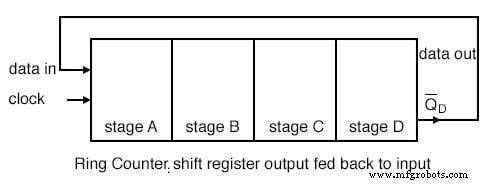
Если последовательный выход сдвигового регистра подключен к последовательному входу, данные могут непрерывно перемещаться по кольцу, пока присутствуют тактовые импульсы.
Если выход инвертируется перед подачей обратно, как показано выше, нам не нужно беспокоиться о загрузке начальных данных в «счетчик звонков».
СВЯЗАННЫЕ РАБОЧИЕ ТАБЛИЦЫ:
- Рабочий лист регистра смены
Промышленные технологии
- Введение в схемы постоянного тока
- Введение в схемы переменного тока
- Введение в дискретные полупроводниковые схемы
- Введение в аналоговые интегральные схемы
- Введение в SPICE
- Сетевые протоколы
- Микропроцессоры
- Данные операционного усилителя
- Введение в периферийные вычисления и примеры использования
- Введение в гармоники:Часть 1