


Синхронные счетчики
Что такое синхронный Счетчик?
синхронный счетчик , в отличие от асинхронного счетчика , это тот, чьи выходные биты изменяют состояние одновременно, без пульсации.
Единственный способ построить такую схему счетчика из триггеров JK - это соединить все входы тактовых импульсов вместе, чтобы каждый триггер получал один и тот же тактовый импульс в одно и то же время:
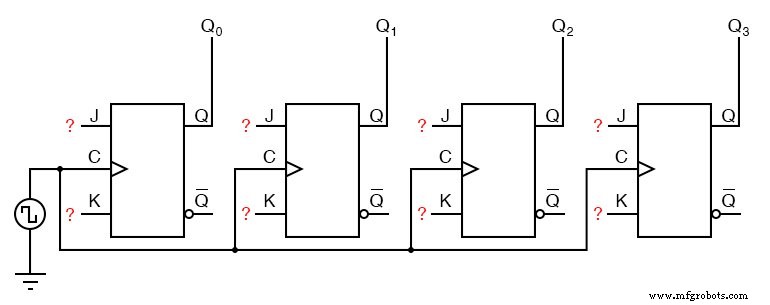
Теперь вопрос в том, что нам делать со входами J и K? Мы знаем, что нам все еще необходимо поддерживать тот же частотный шаблон деления на два, чтобы считать в двоичной последовательности, и что этот шаблон лучше всего достигается с использованием режима «переключения» триггера, поэтому тот факт, что Входы J и K должны быть (иногда) «высокий» - чистый.
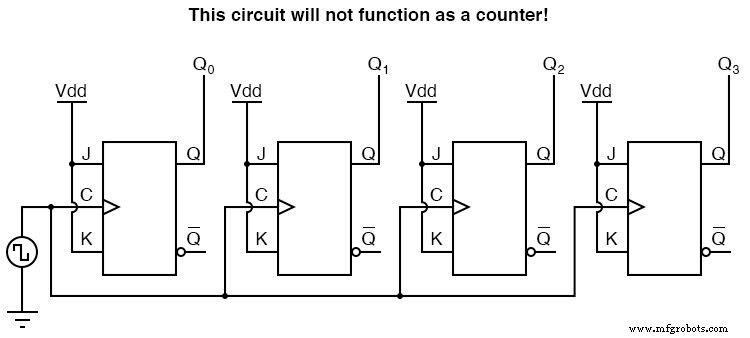
Однако, если мы просто подключим все входы J и K к положительной шине источника питания, как мы это делали в асинхронной схеме, это явно не сработает, потому что все триггеры будут переключаться одновременно:с каждым тактовый импульс!
Давайте еще раз рассмотрим четырехбитную двоичную последовательность счета и посмотрим, есть ли другие шаблоны, предсказывающие переключение бита.
Схема асинхронного счетчика основана на том факте, что переключение каждого бита происходит одновременно с переключением предыдущего бита с «высокого» на «низкий» (от 1 до 0).
Поскольку мы не можем синхронизировать переключение бита на основе переключения предыдущего бита в схеме синхронного счетчика (для этого может возникнуть эффект пульсации), мы должны найти какой-то другой шаблон в последовательности счета, который можно использовать для запуска бита. переключить:
Изучая четырехбитовую двоичную последовательность счета, можно увидеть еще один шаблон прогнозирования.
Обратите внимание, что непосредственно перед переключением бита все предыдущие биты имеют высокий уровень:
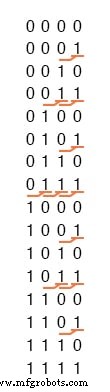
Этот шаблон также можно использовать при разработке схемы счетчика.
Синхронный Счетчик «вверх»
Если мы позволим каждому триггеру JK переключаться в зависимости от того, находятся ли все предыдущие выходы триггера (Q) на «высоком уровне», мы можем получить ту же последовательность подсчета, что и асинхронная схема, без эффекта пульсации, поскольку каждый триггер в этой схеме будет синхронизироваться точно в одно и то же время:
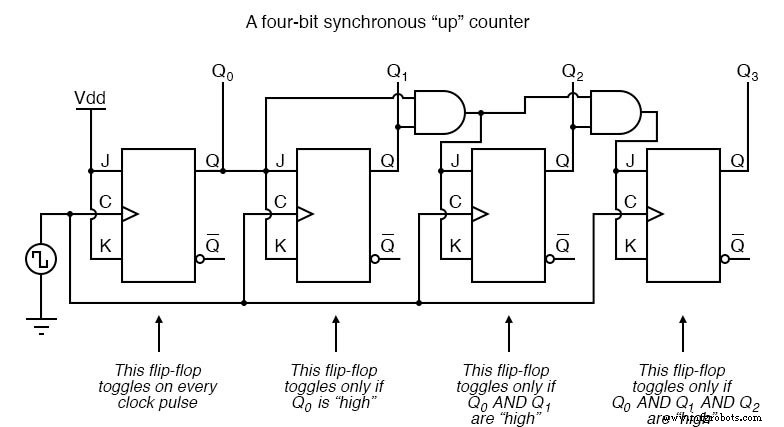
В результате получается четырехбитный синхронный Счетчик «вверх». Каждый из триггеров более высокого порядка готов к переключению (оба входа J и K имеют высокий уровень), если выходы Q всех предыдущих триггеров имеют высокий уровень.
В противном случае входы J и K для этого триггера будут «низкими», что переведет его в режим «защелки», в котором он будет поддерживать свое текущее выходное состояние при следующем тактовом импульсе.
Поскольку первый (LSB) триггер должен переключаться при каждом тактовом импульсе, его входы J и K подключены к V cc или V dd , где они будут все время «под кайфом».
Следующему триггеру нужно только «распознать», что выход Q первого триггера высокий, чтобы быть готовым к переключению, поэтому логический элемент И не требуется.
Однако оставшиеся триггеры должны быть готовы к переключению только тогда, когда все выходные биты более низкого порядка имеют «высокий» уровень, поэтому требуются логические элементы И.
Синхронный счетчик «вниз»
Чтобы сделать синхронный счетчик «вниз», нам нужно построить схему для распознавания соответствующих битовых шаблонов, предсказывающих каждое состояние переключения при обратном отсчете.
Неудивительно, что когда мы исследуем четырехбитную двоичную последовательность счетчиков, мы видим, что все предыдущие биты являются «низкими» до переключения (следуя последовательности снизу вверх):

Поскольку каждый триггер JK оснащен выходом Q ', а также выходом Q, мы можем использовать выходы Q' для включения режима переключения на каждом последующем триггере, поскольку каждый Q 'будет «высоким» каждый время, когда соответствующий Q «низкий»:
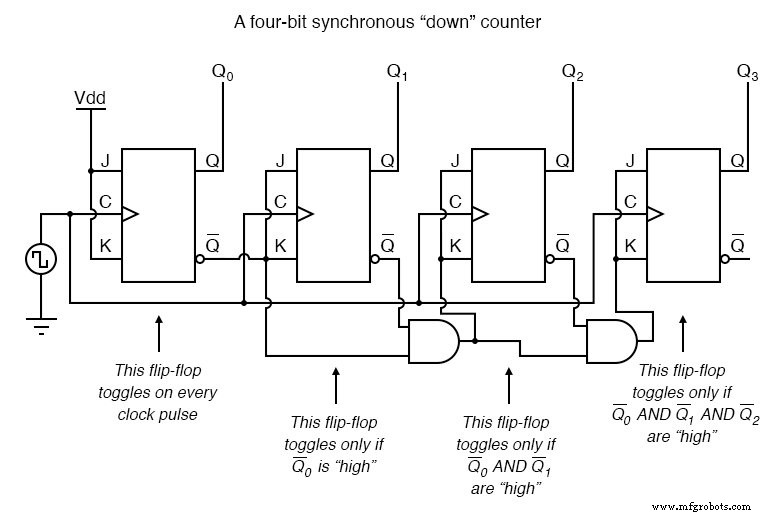
Схема счетчика с выбираемыми режимами счета «вверх» и «вниз»
Развивая эту идею еще на один шаг, мы можем построить схему счетчика с возможностью выбора между режимами счета «вверх» и «вниз», имея двойные линии логических элементов И, определяющих соответствующие битовые условия для последовательности «вверх» и «вниз», соответственно, затем используйте логические элементы ИЛИ для объединения выходов логических элементов И с входами J и K каждого последующего триггера:
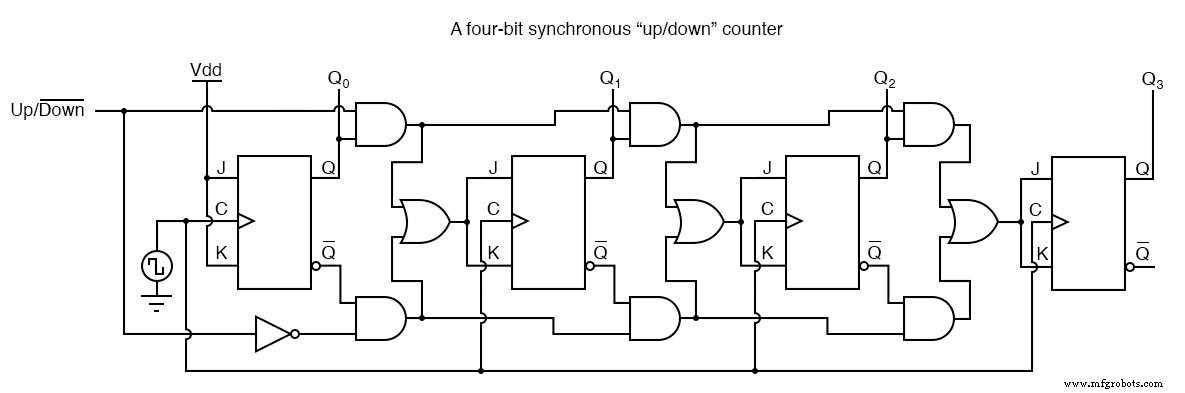
Эта схема не такая сложная, как может показаться на первый взгляд. Строка ввода управления «Вверх / Вниз» просто позволяет верхней или нижней строке логических элементов И передавать выходные сигналы Q / Q ’на последующие ступени триггеров.
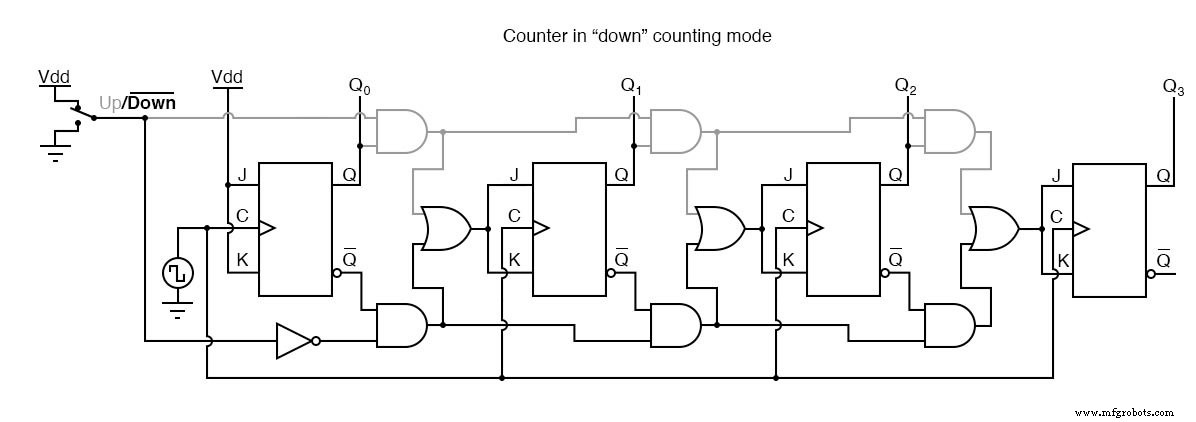
Если линия управления «вверх / вниз» находится на «высоком уровне», активируются верхние вентили И, и схема работает точно так же, как первая («вверх») схема синхронного счетчика, показанная в этом разделе.
Если линия управления «Вверх» / «Вниз» установлена на «низкий», нижние вентили И становятся активными, и схема работает так же, как вторая («обратный» счетчик) схема, показанная в этом разделе.
Чтобы проиллюстрировать это, вот диаграмма, показывающая схему в режиме счета «вверх» (все отключенные схемы показаны серым, а не черным):

Здесь показано в режиме счета «вниз», с тем же серым цветом, представляющим отключенную схему:
Цепи повышающего / понижающего счетчика - очень полезные устройства. Обычное применение - управление движением машин, где устройства, называемые энкодерами вращения вала преобразуют механическое вращение в серию электрических импульсов, эти импульсы «синхронизируют» схему счетчика для отслеживания общего движения:
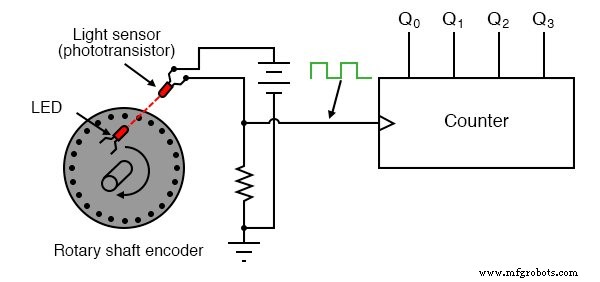
По мере движения машина вращает вал энкодера, создавая и прерывая световой луч между светодиодом и фототранзистором, тем самым генерируя тактовые импульсы для увеличения счетной схемы.
Таким образом, счетчик интегрирует или накапливает общее движение вала, служа электронной индикацией того, как далеко переместилась машина.
Если все, о чем мы заботимся, это отслеживание общего движения и не учитываем изменения в направлении движения, этого расположения будет достаточно.
Однако, если мы хотим, чтобы счетчик увеличивал с одним направлением движения и декрементом при обратном направлении движения мы должны использовать счетчик вверх / вниз и схему кодировщика / декодирования, имеющую возможность различать разные направления.
Если мы перепроектируем кодировщик так, чтобы он имел два набора пар светодиод / фототранзистор, эти пары выровнялись так, что их прямоугольные выходные сигналы были равны 90 o не совпадающие по фазе друг с другом, мы получаем так называемый квадратурный выход кодировщик (слово «квадратура» просто означает 90 o угловое разделение).
Схема определения фазы может быть сделана из триггера D-типа, чтобы отличать последовательность импульсов по часовой стрелке от последовательности импульсов против часовой стрелки:
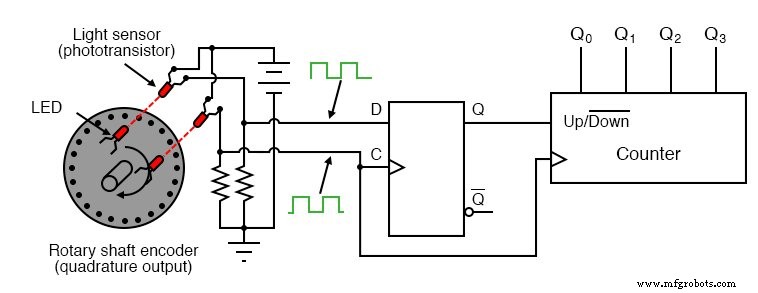
Когда энкодер вращается по часовой стрелке, прямоугольная волна входного сигнала «D» будет опережать прямоугольную волну входного сигнала «C», что означает, что вход «D» уже будет «высоким», когда «C» перейдет с «низкого» на "Высокий", таким образом установка триггер D-типа (делающий выход Q «высоким») с каждым тактовым импульсом.
«Высокий» выход Q переводит счетчик в режим «Up», и любые тактовые импульсы, полученные тактовым сигналом от энкодера (от любого светодиода), будут увеличивать его.
И наоборот, когда энкодер меняет направление вращения, вход «D» будет отставать от входного сигнала «C», что означает, что он будет «низким», когда форма сигнала «C» переходит с «низкого» на «высокий», заставляя D -введите триггер в сброс состояние (делая выход Q «низким») с каждым тактовым импульсом.
Этот «низкий» сигнал дает команду схеме счетчика уменьшаться с каждым тактовым импульсом от энкодера.
Эта схема или что-то очень похожее на нее лежит в основе каждой схемы измерения положения, основанной на датчике импульсного датчика.
Такие приложения очень распространены в робототехнике, управлении станками с ЧПУ и других приложениях, связанных с измерением обратимого механического движения.
СВЯЗАННЫЕ РАБОЧИЕ ТАБЛИЦЫ:
- Таблица синхронного счетчика
Промышленные технологии