


Использование дельта-сигма АЦП в высокоточных мультисенсорных системах
Конфигурации с несколькими датчиками для измерений нефти, газа и нефти постоянно собирают чувствительные данные о давлении и температуре. Однако для регистрации различных комбинаций физических значений температуры и давления требуется очень краткая система с высоким разрешением.
Это непростая задача для разработчиков, поскольку требуемая схема датчика с высоким разрешением распространяется в широком диапазоне температуры и давления. В большинстве случаев многосенсорная электроника слишком велика для заводского применения, а преобразование дискретных аналоговых сигналов не является достаточно точным или надежным (рис. 1).
 Рис. 1. Предохранительный клапан защищает трубопроводные системы от избыточного давления. (Источник:Shutterstock)
Рис. 1. Предохранительный клапан защищает трубопроводные системы от избыточного давления. (Источник:Shutterstock)
Решением для мультисенсорной электроники является АЦП высокого разрешения. Комбинация термопары, резистивного датчика температуры (RTD), датчиков давления и аналого-цифрового преобразователя (АЦП) достижима с помощью точного, высокоскоростного, многоканального дельта-сигма (ΔΣ) АЦП, где основные характеристики это среднеквадратичный шум. Это создает высокоточную и надежную систему с несколькими датчиками для нефтегазовой и нефтяной электроники.
В этой статье кратко обсуждаются вопросы, связанные с достижением точной границы раздела ячеек температуры и давления с помощью ΔΣ АЦП.
Определение давления
Устройства для измерения давления - это те, которые требуют электрического возбуждения, и те, в которых давление является единственным источником энергии. К устройствам механического типа относятся сильфоны, диафрагмы, бурдоны, трубки и манометры. В этих устройствах изменение давления вызывает механическую реакцию, такую как изменение положения механического рычага или уровня жидкости в трубке.
Датчики давления с электрическим возбуждением являются синергетическими с ΔΣ АЦП и микроконтроллерами. Эти датчики могут быть емкостными датчиками, линейно-регулируемыми дифференциальными трансформаторами (LVDT) или пьезорезистивными датчиками. Обычно предпочтительным устройством является пьезорезистивный датчик (рис. 2).

Рис. 2. Пьезорезистивный датчик давления (а) обычно является предпочтительным устройством. Высокая сторона модели пьезорезистивного моста (b) требует возбуждения напряжения или тока. (Источник:Maxim Integrated)
На рис. 2а верхняя сторона изготовленного датчика изготовлена из резистивного материала, а нижняя - из диафрагмы. Высокая сторона модели пьезорезистивного моста (рис. 2b) требует возбуждения напряжения или тока. Величина возбуждения влияет на динамический диапазон выходного сигнала датчика, максимальная разница между V OUT + и V OUT - в системе 3,3 В, которая обычно находится в диапазоне от десятков милливольт до нескольких сотен милливольт. Электроника, которая отслеживает мостовой датчик с помощью усилителей и АЦП, изменяет дифференциальный выходной сигнал на цифровое представление.
Важность измерения температуры
Существует множество типов датчиков температуры, подходящих для любого применения с точки зрения температурного диапазона, линейности, точности, прочности и простоты использования. Датчики температуры в этом приложении контролируют температуру датчика давления, чтобы гарантировать получение надежных показаний давления. Для измерения температуры в этом приложении используются термопара K-типа и RTD (рис. 3).
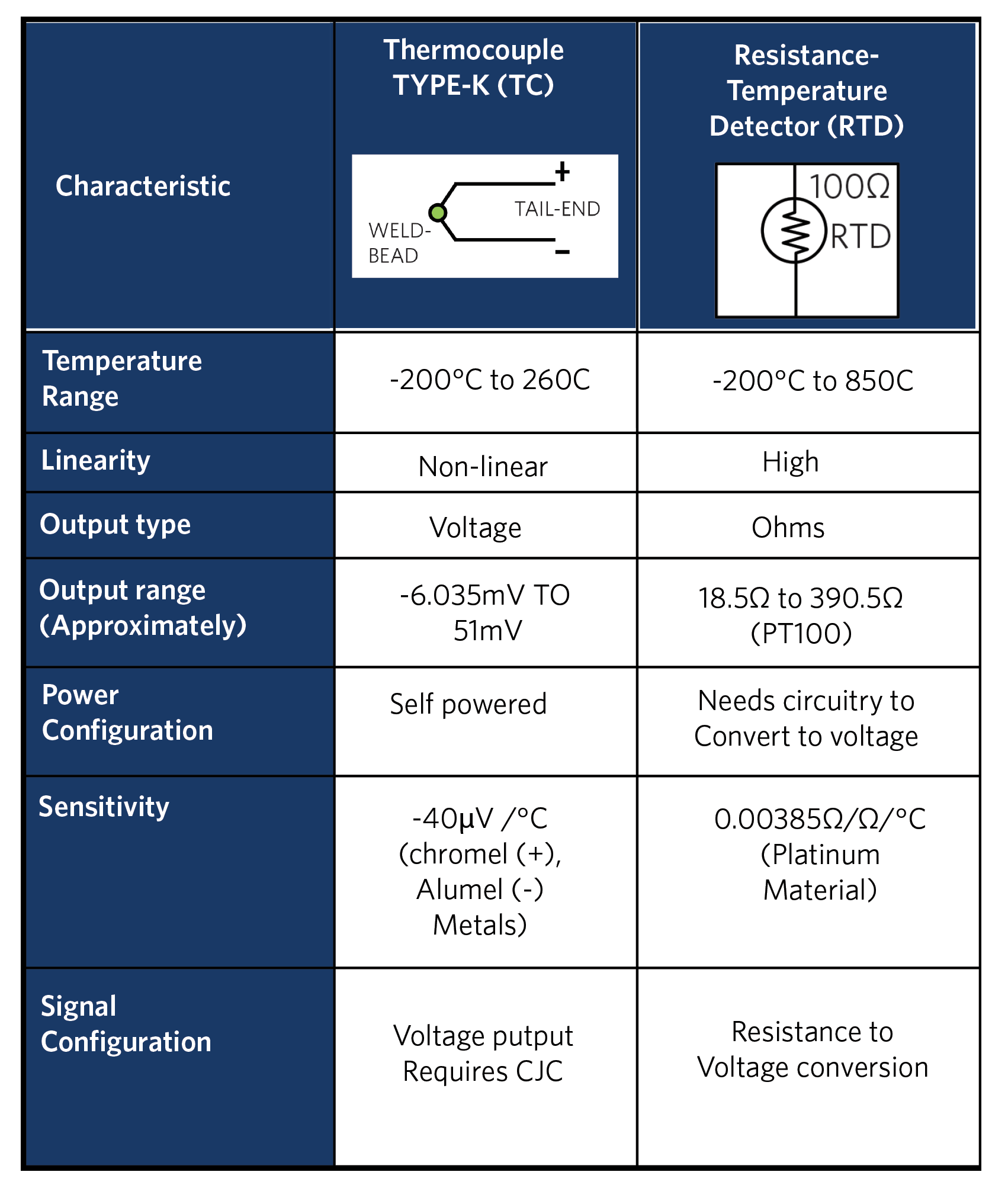 Рис. 3. Двухпроводная термопара TYPE-K требует второго измерения температуры с помощью RTD для компенсации холодного спая (CJC). (Источник:Maxim Integrated)
Рис. 3. Двухпроводная термопара TYPE-K требует второго измерения температуры с помощью RTD для компенсации холодного спая (CJC). (Источник:Maxim Integrated)
На рис. 3 прочный датчик температуры термопары может измерять высокие температуры до + 1260 ° C, в то время как RTD измеряет температуру на переходах термопара / медь.
АЦП высокого разрешения
В случае АЦП существует очень сильный компромисс между разрешением и скоростью. Из самых быстрых преобразователей конвейерный АЦП может обеспечивать скорость передачи данных до десятков гигаэмплов в секунду (Gsps), обеспечивая при этом приемлемое разрешение до 12 бит.
Обычный АЦП - это преобразователь регистров последовательного приближения (SAR). Этот преобразователь генерирует выборки с выходом медленнее, чем конвейерный преобразователь, работающий со скоростью от 10 до 10 Msps и с увеличением разрешения до 18 бит. Преобразователь SAR является хорошей отраслевой рабочей лошадкой, если допустимые значения младшего разряда входного напряжения (LSB) выражаются в микровольтах (мкВ). Однако, если приложению требуется преобразование размеров LSB в области нановольт (нВ), единственной реальной альтернативой является ΔΣ АЦП (рисунок 4).
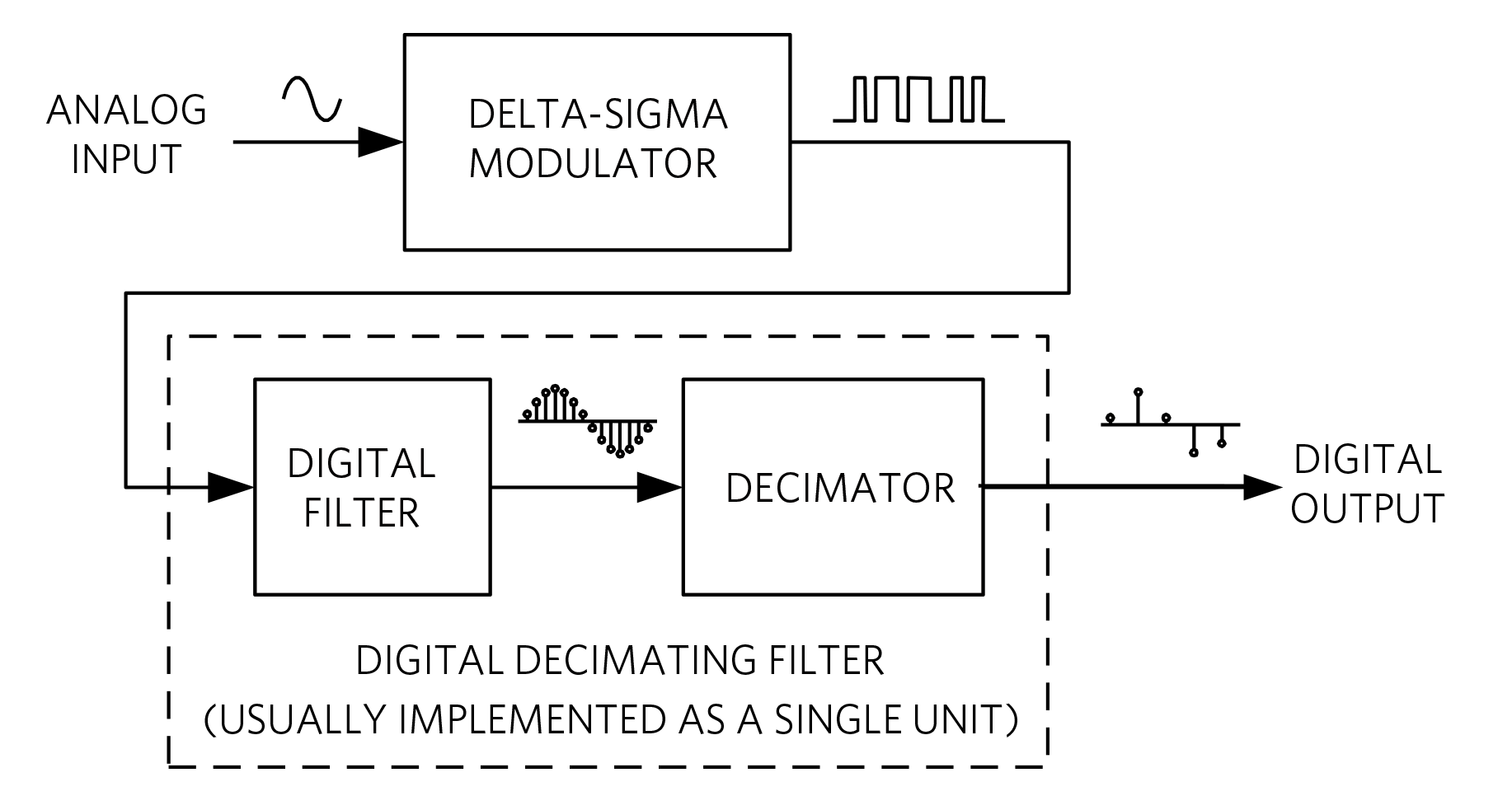 Рис. 4. Базовый ΔΣ АЦП преобразует входное напряжение в ΔΣ-модулятор. (Источник:Maxim Integrated)
Рис. 4. Базовый ΔΣ АЦП преобразует входное напряжение в ΔΣ-модулятор. (Источник:Maxim Integrated)
ΔΣ АЦП на рисунке 4 преобразует входное напряжение в ΔΣ-модулятор. Модулятор создает однобитную серию импульсов в форме шума, которая представляет аналоговое входное напряжение. Затем преобразователь накапливает однобитную серию импульсов и посредством передискретизации выполняет различные виды цифровой фильтрации сигнала. Со временем фильтр устраняет высокочастотный шум и дает многобитовые результаты до 24 бит. Конвертер отправляет эти результаты на выходной разъем внешнего микроконтроллера.
ΔΣ модулятор
Модулятор ΔΣ запускает процесс уменьшения шума АЦП. Внимательное изучение этого модулятора быстро показывает, откуда взялась метка ΔΣ (рис. 5).
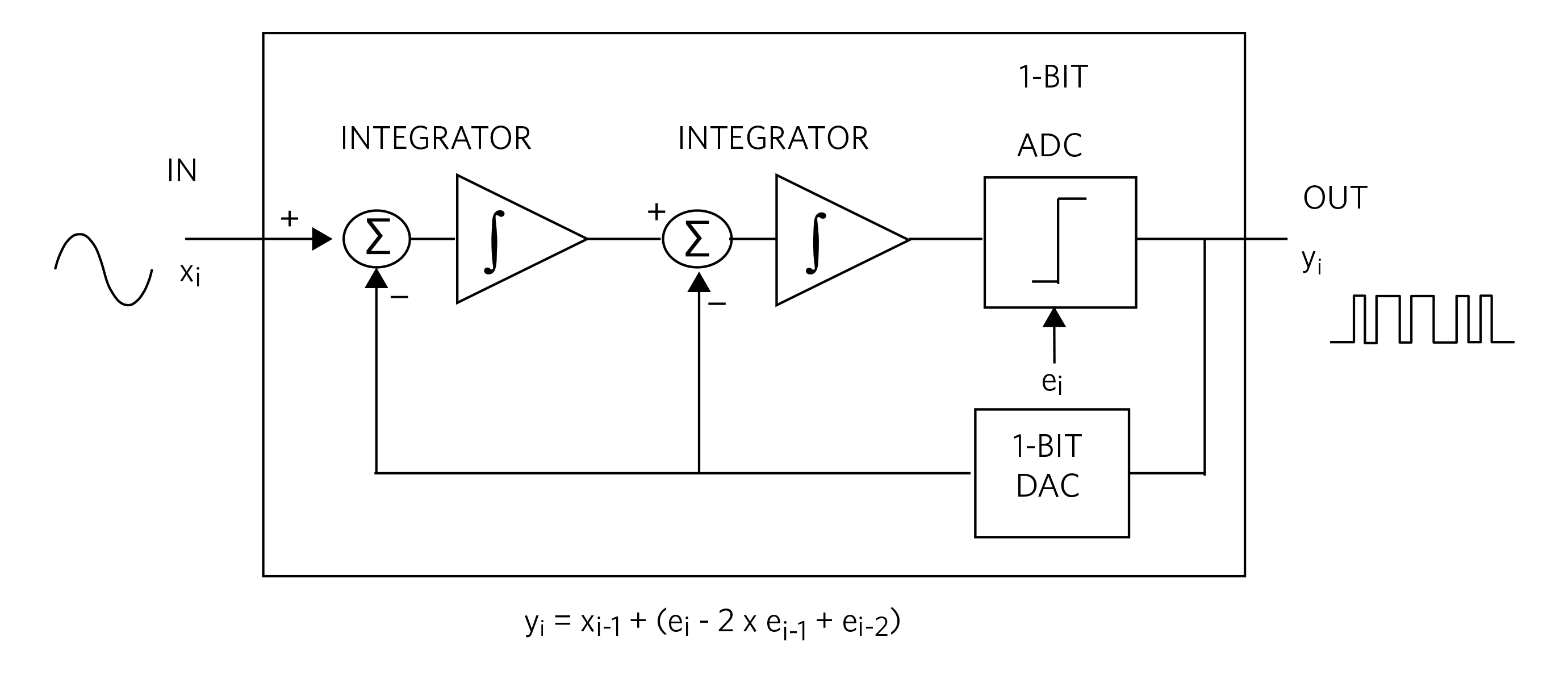 Рисунок 5:Модулятор ΔΣ второго порядка содержит систему обратной связи, содержащую внешнюю Δ-функцию, за которой следуют два интегратора (Σ-функция). (Источник:Maxim Integrated)
Рисунок 5:Модулятор ΔΣ второго порядка содержит систему обратной связи, содержащую внешнюю Δ-функцию, за которой следуют два интегратора (Σ-функция). (Источник:Maxim Integrated)
На рисунке 5 после двух интеграторов сигнал преобразуется через 1-битный АЦП с частотой дискретизации, равной частоте дискретизации (F S ), а затем возвращается через 1-битный ЦАП с той же частотой дискретизации на входы двух интеграторов. В этой системе присутствует шум квантования (e i ) с 1-битным АЦП. Согласно формуле внизу рисунка 5 шум появляется на выходе вместе с шумом от предыдущих преобразований.
Модулятор создает эффект ограничения шума при накоплении сигнала на выходе модулятора. Этот эффект формирования шума преобразует 1-битный шум квантования в более высокие частоты (рисунок 6).
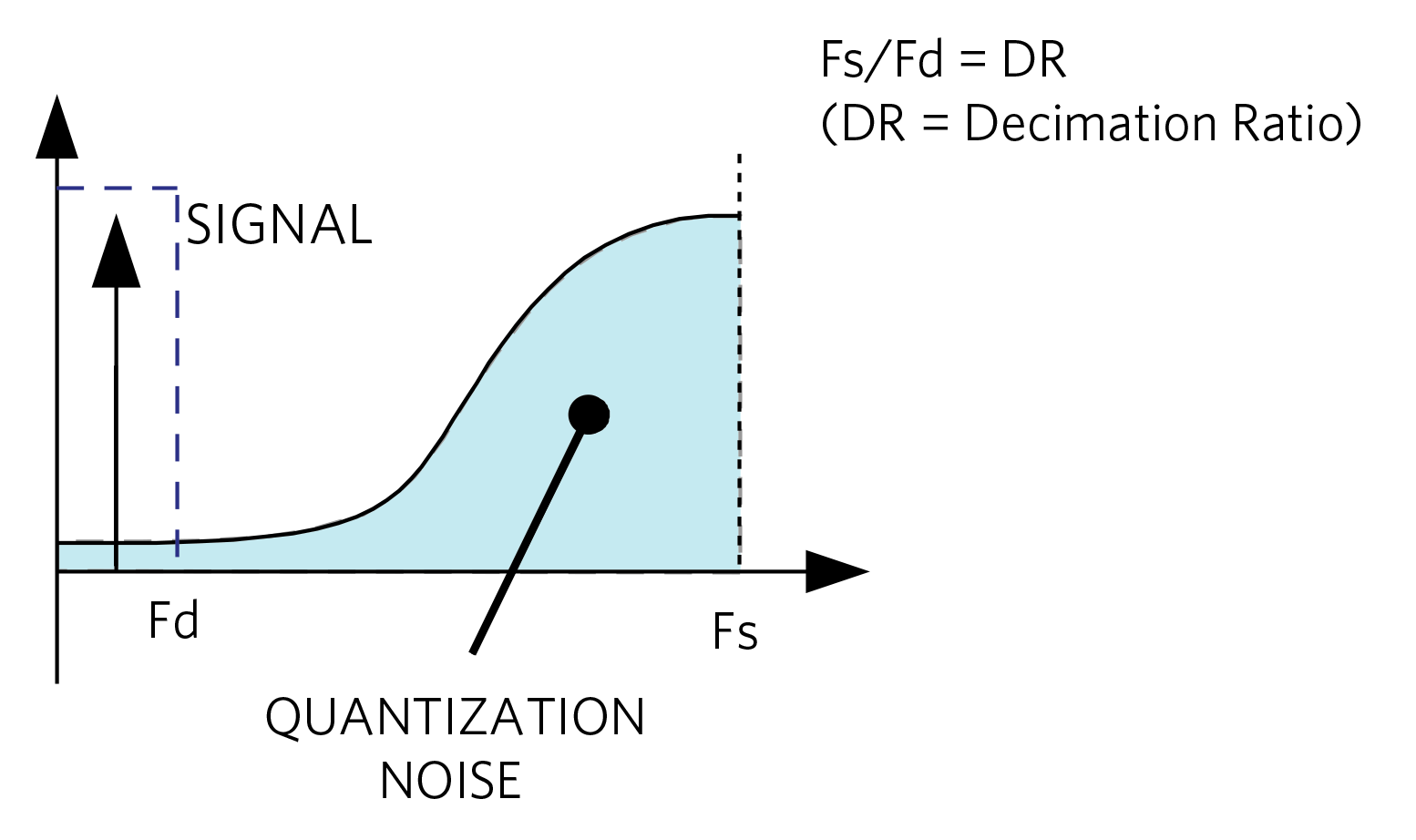 Рис. 6. Шум на выходе модулятора создает шумовую характеристику. (Источник:Maxim Integrated)
Рис. 6. Шум на выходе модулятора создает шумовую характеристику. (Источник:Maxim Integrated)
На рисунке 6 частота Найквиста для системы - это частота дискретизации модулятора, F S . Порядок модулятора определяет уровень шума квантования по частоте (рисунок 7).
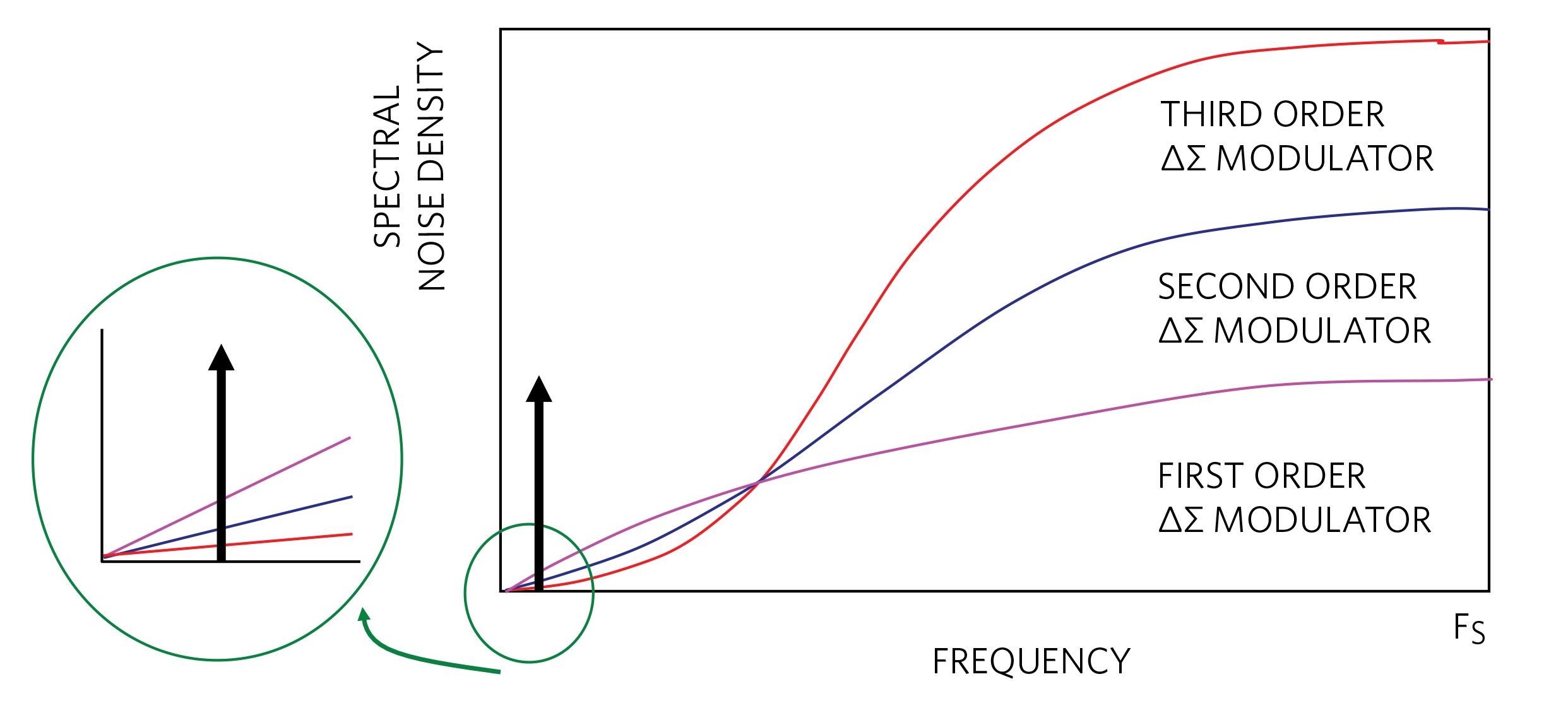
Рис. 7. На этом графике показана способность модуляторов первого, второго и третьего порядка формировать шум. (Источник:Maxim Integrated)
На рисунке 7 шум квантования модуляторов более низкого порядка выше вблизи постоянного тока и ниже на высокой частоте. ΔΣ АЦП собирает или передискретизирует 1-битный выходной поток модуляторов и выполняет цифровую фильтрацию нижних частот.
Цифровой / децимационный фильтр
С ядром ΔΣ АЦП выполняются два действия по снижению системного шума. Модулятор успешно преобразует шум квантования в более высокие частоты, а цифровой / децимационный фильтр ослабляет высокочастотный шум.
Выходная скорость передачи данных АЦП, определяемая следующей частотой среза цифрового фильтра нижних частот, составляет F D . Частотная характеристика цифрового / децимационного фильтра (пунктирная линия на рисунке 4) успешно ослабляет высокочастотный шум.
Завершено ΔΣ Изображение ADC
Для полноценного рабочего ΔΣ АЦП в ядре требуется ΔΣ-модулятор, Sinc и цифровые фильтры с конечной импульсной характеристикой (FIR) (рисунок 8).
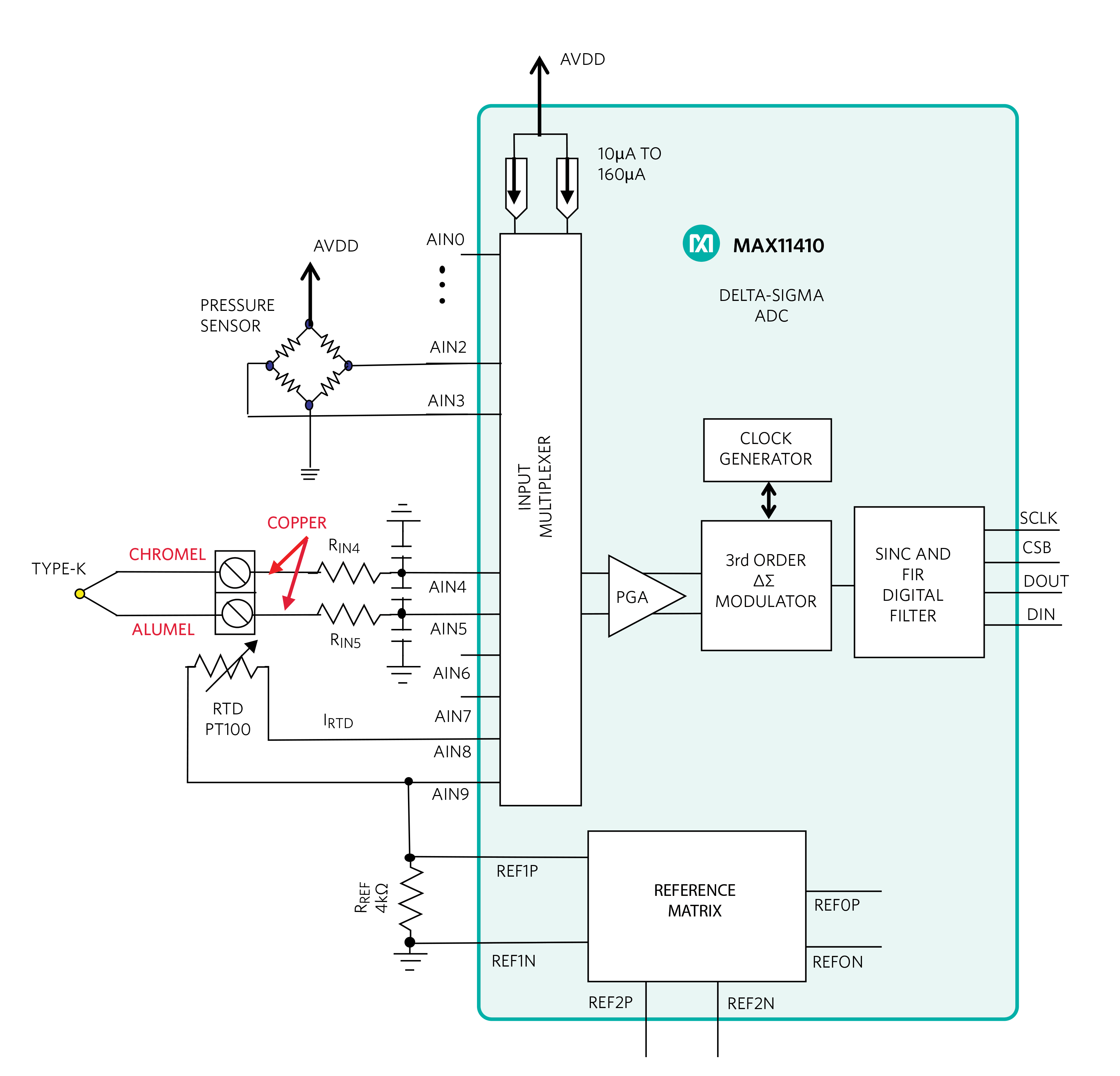
Рисунок 8:На этой диаграмме показан полный рабочий ΔΣ АЦП с входами датчика давления и температуры. (Источник:Maxim Integrated)
В основной блок-схеме АЦП ΔΣ (рисунок 4) находится цифровой / децимационный фильтр. Фактический ΔΣ АЦП на рисунке 8 имеет общие цифровые фильтры Sinc и FIR, которые дополняют картину с низким уровнем шума преобразователя.
Цифровой фильтр Sinc выполняет функцию фильтра нижних частот. Дизайн фильтра первого порядка устанавливается в один период слова данных. Фильтр Sinc четвертого порядка или Sinc 4 устанавливается в четыре периода слова данных. Форма фильтра частотной области отображается с понижением частоты (рис. 9).

Рис. 9. Эти графики показывают частотную характеристику фильтра Sinc третьего порядка (Sinc
3
). (Источник:Maxim Integrated)
На рисунке 9 можно запрограммировать наименьшее затухание для соответствия подходящим частотам, например, кратным 50 или 60 Гц. Устройство на рисунке 8 реализует Sinc 4 цифровой фильтр.
Скругленные характеристики цифровых фильтров Sinc делают их одними из самых простых в реализации цифровых фильтров, поэтому они очень полезны в приложениях со смешанными сигналами. Однако есть приложения, в которых предпочтительны более острые углы. КИХ-фильтр предлагает более острые углы с дополнительным преимуществом стабильности. ΔΣ АЦП на рисунке 8 имеет фильтр 50 Гц / 60 Гц, который обеспечивает подавление более 90 дБ на частотах 50 и 60 Гц при скорости передачи данных 16 выборок в секунду.
Полный ΔΣ АЦП (рисунок 8) имеет дополнительные вспомогательные функции, такие как входной мультиплексор, усилитель с программируемым усилением (PGA), комплексный цифровой фильтр, генератор тактовых импульсов и опорную матрицу. С PT100 RDT, источником тока 160 мкА и коэффициентом усиления PGA 128, ΔΣ АЦП MAX11410 имеет входной диапазон от 1,234 В до 2,837 В. С этим 24-битным преобразователем в Sinc 4 конфигурации, размер младшего разряда напряжения составляет 0,039 мкВ RMS . Точность измерения температуры находится в диапазоне ± 100 ° C, а точность RTD составляет ~ 4,7 мк ° C / бит.
В этой статье представлены вопросы, связанные с достижением точного интерфейса ячейки температуры и давления с ΔΣ ADC для нефтегазовой и нефтяной электроники. Схема приложения использует давление, термопару и датчик RTC для преобразования одного устройства, где основными характеристиками являются шум, входной мультиплексор и стоимость спецификации.
>> Эта статья была первоначально опубликована на наш дочерний сайт EDN.
Датчик
- Температурный профиль Raspberry Pi с использованием LabVIEW
- Библиотека Python датчика температуры TMP006 с использованием Raspberry pi,
- Датчик температуры Python и Raspberry Pi
- Raspberry Pi, считывающий температуру и давление BMP085
- Система управления устройством на основе температуры с использованием LM35
- Следите за температурой в доме с помощью Raspberry Pi
- Аналоговые датчики на Raspberry Pi с использованием MCP3008
- Блог:преимущества использования переносной заплаты температуры охлаждения
- Преимущества использования Robotic Vision для приложений автоматизации
- Использование керамики в выхлопных системах для очистки выбросов