


Сглаживание характеристик трансмиссии электромобиля с помощью полевого алгоритма управления
Для высокопроизводительных двигателей необходим механизм управления, обеспечивающий повышенную плавность, надежность и эффективность. Одним из наиболее подходящих примеров такого применения является двигатель, используемый в трансмиссии электромобилей (EV), которым можно управлять с помощью системы на основе полевого управления (FOC).
Чтобы силовой агрегат электромобиля работал плавно, схема управления должна быть такой, чтобы двигатель мог работать в широком диапазоне скоростей и создавать максимальный крутящий момент на самой низкой из скоростей. С технической точки зрения, управление двигателем должно основываться на крутящем моменте и магнитном потоке, чтобы мы могли точно контролировать крутящий момент, контролируя ток.
Основной принцип вращения ротора двигателя - создание магнитного поля в статоре. Для этого на катушки статора подается переменный ток. Секрет плавной работы двигателя заключается в знании положения ротора, то есть угла между осью магнитного потока ротора и магнитной осью статора. Как только это значение известно, ток статора выравнивается с осью крутящего момента ротора. Для достижения максимальной эффективности магнитный поток статора должен быть перпендикулярен магнитному потоку ротора.
Управление двигателем на основе FOC
На бумаге типичная система управления двигателем на основе полевого управления (ВОК) выглядит так, как показано на рисунке 1.
щелкните, чтобы увидеть полноразмерное изображение
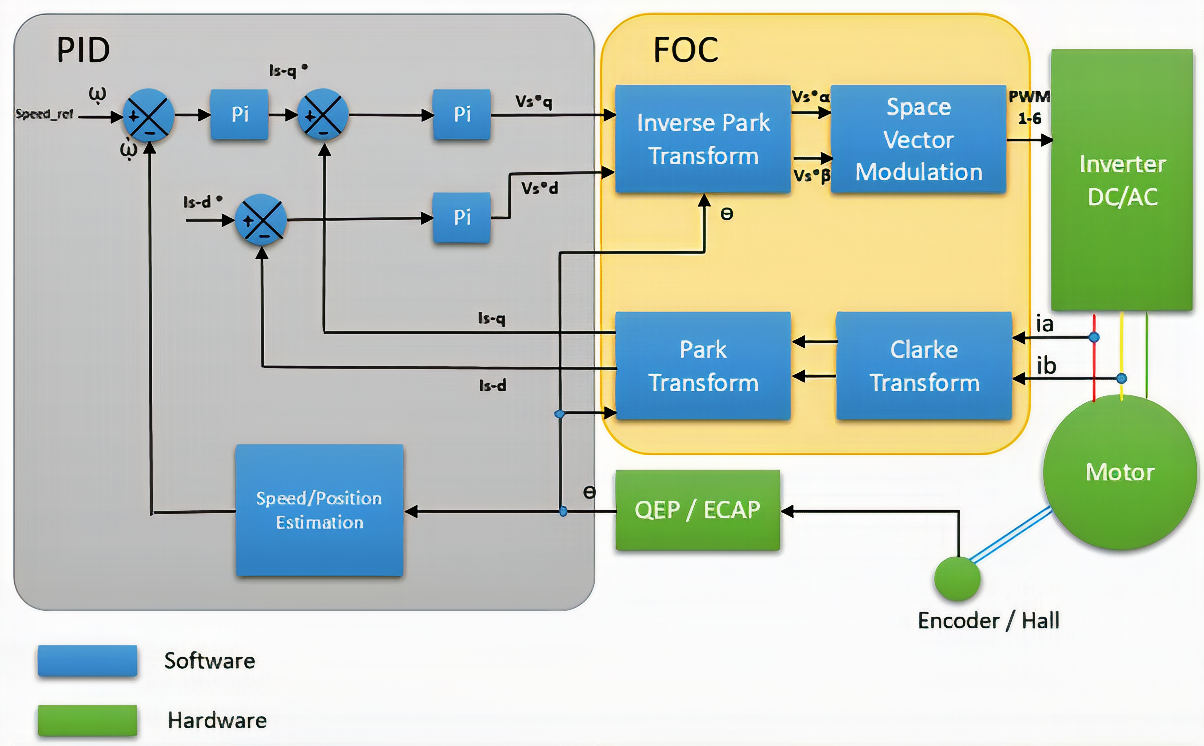
Рис. 1. На схеме показаны аппаратные и программные компоненты системы управления двигателем на основе ВОП. Источник:Texas Instruments
Давайте разберемся с каждым из программных и аппаратных компонентов:
- Трехфазный инвертор :Трехфазный инвертор переменного / постоянного тока обеспечивает трехфазное напряжение на двигатель PMSM / BLDC для привода. Он принимает сигналы широтно-импульсной модуляции (ШИМ) из блока пространственно-векторной модуляции (SVM).
- Интерфейс QEP :Он взаимодействует с энкодером, чтобы получить механическое положение ротора и передать его другим блокам.
- Блок оценки скорости / положения :Как следует из названия, в этом блоке выполняются вычисления для получения положения и скорости ротора.
- ПИД-регулирование :Пропорциональная интегральная производная (ПИД) - это контур управления, который полагается на обратную связь от двигателя в виде крутящего момента. Вычисляя разницу между желаемым крутящим моментом и крутящим моментом, полученным от блока преобразования Парка, он выполняет коррекцию.
- Преобразование Кларка :Блок преобразования Кларка преобразует ток статора (ia, ib) в систему координат потока и крутящего момента (d-q), используя формулу преобразования Кларка. Стационарный опорный кадр трехфазной системы преобразуется в двухквадрантную систему в стационарном опорном кадре.
- Преобразование Парка и обратное преобразование Парка :Этот блок преобразует стационарный опорный кадр во вращающийся опорный кадр с двухфазной системой с ортогональными осями. Ортогональные компоненты - это d-q, которые представляют собой прямую и квадратурную оси двигателя, соответственно. Блок обратного преобразования Парка появляется на картинке, когда выходное напряжение статора должно быть преобразовано обратно в стационарную опорную систему (опорную мощность статора).
- Модуляция пространственного вектора :Это метод определения сигнала ШИМ, который должен быть применен к двигателю. SVM принимает вектор напряжения статора в качестве входа и выдает трехфазное выходное напряжение в качестве выходного.
Далее мы рассмотрим, как эти компоненты используются для управления двигателем с использованием алгоритма FOC.
Обзор рабочего процесса FOC
Для управления трехфазным электродвигателем мы должны подавать на двигатель надлежащее напряжение, считывая фазный ток Ia, Ib, Ic. Без их контроля невозможно создать вектор магнитного потока статора, который находится под углом 90 градусов к вектору магнитного потока ротора.
FOC - это математический алгоритм, который помогает легко достичь этого и других результатов, хотя разработка FOC довольно сложна. Алгоритм FOC может упростить управление системой отсчета трехфазных синусоидальных токов, разложив их на системы отсчета потока и крутящего момента (d-q). Этими двумя компонентами можно управлять по отдельности.
На рисунке 1 показан энкодер / датчик Холла, который определяет положение ротора и передает его в блок скорости / положения. Это значение также подается в блок преобразования Park и обратного преобразования Park. В то же время фазные токи (ia, ib) от двигателя подаются на блок преобразования Кларка. Фазовые токи двигателя преобразуются преобразованием Кларка в два ортогональных тока (iα, iβ). Вновь преобразованные фазные токи теперь обозначают как токи, создающие крутящий момент, и токи, создающие магнитный поток, соответственно. Хотя мы успешно разложили фазный ток на компоненты магнитного потока и крутящего момента, они все еще синусоидальны, что затрудняет управление, поскольку они продолжают изменяться.
Следующая задача алгоритма FOC - избавиться от синусоидальных волн, для чего требуется один важный ввод - положение ротора. Мы видим на диаграмме, что это значение также подается в блок Park-transform. В этом блоке фокус состоит в том, чтобы перейти от неподвижной системы отсчета - с точки зрения статора - к вращающейся системе отсчета с точки зрения ротора. Проще говоря, блок преобразования Парка преобразует два переменного тока (iα, iβ) в токи постоянного тока. Это позволяет блоку PID легко управлять им так, как он хочет.
Давайте теперь представим блок PID. Входом в блок PID от блока FOC являются Iq и Id, крутящий момент и составляющая магнитного потока. В контексте электромобиля блок PID будет получать задание скорости, когда водитель управляет дроссельной заслонкой. Блок PID теперь сравнивает два значения и вычисляет ошибку. Эта ошибка является значением, на которое блок ПИД должен вращать двигатель. Выход, который дает блок PID, - это Vq и Vd. Этот результат достигает обратного преобразования Кларка и Парка, где происходит полная противоположность преобразованию Кларка и Парка. Блок обратного преобразования Парка преобразует вращающуюся опорную систему координат в стационарную опорную систему, чтобы их фазы двигателей могли коммутироваться.
щелкните, чтобы увидеть полноразмерное изображение
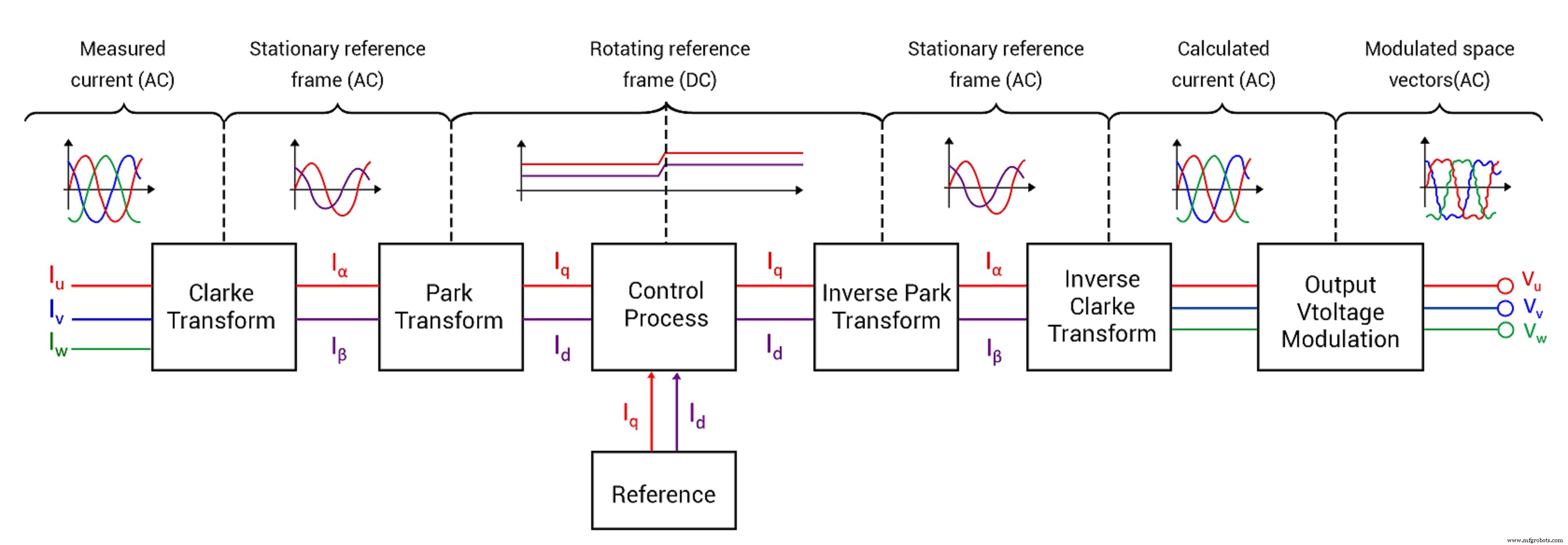
Рис. 2:Выходные данные PID достигают обратного преобразования Кларка и Парка, где происходит полная противоположность преобразованию Кларка и Парка. Источник:Texas Instruments
На последнем этапе управления двигателем на основе FOC-алгоритма роль пространственно-векторной модуляции (SVM) приобретает большое значение. Роль SVM заключается в генерации сигналов ШИМ, которые поступают в инвертор, который, в свою очередь, генерирует трехфазное напряжение, приводящее в действие двигатель. В некотором смысле SVM также выполняет работу по обратному преобразованию Кларка.
Трехфазный инвертор имеет шесть транзисторов, которые подают выходное напряжение на двигатель. По сути, есть два состояния, в которых эти выходы должны быть либо с закрытым верхним транзистором, либо с открытым нижним транзистором, или наоборот. С двумя состояниями и тремя выходами всего восемь состояний (2 3 ) можно рассчитать. Когда вы нанесете эти восемь состояний, также называемых базовыми векторами, на гексагональную звездную диаграмму, вы обнаружите, что каждый соседний вектор находится на расстоянии 60 градусов друг от друга с точки зрения разности фаз. SVM находит средний вектор, который дает выходное напряжение (V out ).
Фактическое управление электромотором
FOC как схема управления двигателем незаменима для конструкций электромобилей. Благодаря бесшумной и плавной работе двигателя, необходимой для электромобилей, FOC отлично подходит. Многие OEM-производители и разработчики систем управления часто настраивают стандартный алгоритм FOC в соответствии с уникальными требованиями своей программы электромобилей, но основная концепция остается той же.
Достижения в области микроконтроллеров автомобильного уровня, такие как семейство микроконтроллеров PIC18Fxx39 от Microchip или микроконтроллеры реального времени C2000 от TI, могут ускорить разработку алгоритма FOC для систем управления двигателями электромобилей.
>> Эта статья изначально была опубликована на нашем дочернем сайте EDN .
 Вайбхав Ананд руководитель отдела цифрового маркетинга в компании Embitel.
Вайбхав Ананд руководитель отдела цифрового маркетинга в компании Embitel.  Саураб С. Хобе является разработчиком встраиваемых систем в Embitel.
Саураб С. Хобе является разработчиком встраиваемых систем в Embitel.
Связанное содержание:
- Решение проблем проектирования детерминированного многоосевого управления двигателем.
- Безопасное управление тяговым инвертором электромобиля.
- Новые решения улучшают управление питанием электромобилей.
- Определение требований к разработке электронного и электронного оборудования.
- Контроллер мотора объединяет ядро Arm Cortex-M0
Чтобы получить больше информации о Embedded, подпишитесь на еженедельную рассылку Embedded по электронной почте.
Встроенный
- Разрешающие схемы и схемы блокировки
- Цепи управления двигателем
- Программный пакет упрощает дизайн управления двигателем
- МОДУЛЬ ДАННЫХ:23,1-дюймовый ультра-растянутый TFT-дисплей с интеллектуальным управлением
- Maxim:двунаправленный усилитель считывания тока с подавлением ШИМ
- Контроллер мотора объединяет ядро Arm Cortex-M0
- Lanner:оптимизированное для виртуализации решение с многоядерным процессором
- Блог:медицинские носимые устройства с отличными характеристиками
- Токарный станок с ЧПУ
- Почему вам следует доверить SEW-Eurodrive все ваши потребности в управлении двигателем