


Наборы микросхем радаров для получения 4D-изображений улучшают идентификацию объектов
Радары становятся все популярнее, особенно благодаря достижениям, которые обещают идентификацию / классификацию объектов и более высокое разрешение по широте - то, что традиционные радары не могут сделать. Благодаря этим нововведениям, радары становятся наиболее востребованными датчиками среди автопроизводителей и компаний первого уровня, разрабатывающих высокоавтоматизированные автомобили.
Решение для радиолокационной системы (Источник:NXP)
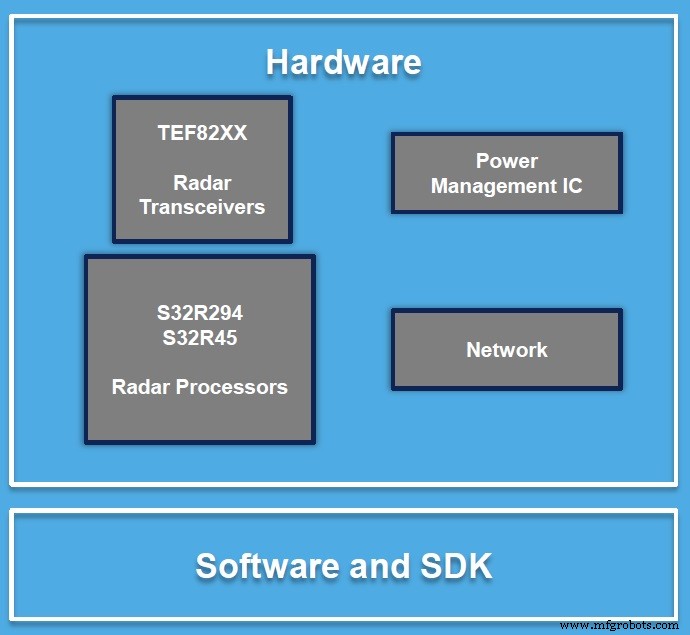
Отвечая на высокие ожидания автомобильной промышленности, NXP Semiconductors объявила о тестировании набора новых наборов микросхем радарных датчиков, состоящего из радарного процессора S32R45 компании и новых приемопередатчиков 77 ГГц под названием TEF82xx.
Компания NXP, которая пять лет назад впервые представила РЧ-КМОП-радары, выпустив свой первый радиолокационный чип под названием «Dolphin», является ведущим поставщиком автомобильных радаров.
Датчики 4D-изображения NXP могут измерять не только дальность и скорость, но также «высоту, направление и угол прибытия, идентифицируя объекты с гораздо более высоким разрешением», - объяснил Торстен Леманн, исполнительный вице-президент и генеральный менеджер по радиочастотной обработке. интервью с EE Times . По словам Лемана, с помощью радара 4D-изображения, который может распознавать не только горизонтальную, но и вертикальную плоскости, транспортное средство может, например, определить, двигаться ли он «под» или «над» объектом.
«Представьте себе сцену, когда автомобиль движется по шоссе со скоростью 80 километров в час, а мотоцикл - небольшой объект с низкой отражательной способностью - движется сзади со скоростью 200 километров в час», - сказал он. В отличие от камер и лидаров, эти новые улучшенные радары могут идентифицировать мотоцикл, изначально находящийся далеко друг от друга, и распознавать эти два объекта, движущихся с двумя разными скоростями, пояснил Леманн.

(Источник:NXP)
До сих пор радар был единственным датчиком, способным работать на расстоянии более 300 метров, распознавая объекты, движущиеся с высокой скоростью. Ни камеры, ни лидары не могут справиться с таким большим расстоянием и скоростью.
С появлением радаров для формирования изображений с более высоким разрешением многие поставщики радаров, включая NXP, стремятся превратить радары в единственный высокоскоростной датчик, способный работать в самых неблагоприятных погодных условиях и условиях освещения.
Масштабируемость
Компания NXP не единственная, кто говорит о радарах с 4D-изображениями. В сентябре прошлого года компания Continental объявила, что использует ПЛИС Xilinx для развертывания первого в автомобильной промышленности готового к производству радара 4D-изображения, который, как ожидается, поступит в легковые автомобили в 2021 году.
Учитывая большой опыт NXP в производстве КМОП-трансиверов с тактовой частотой 77 ГГц и радиолокационного процессора S32R45, NXP утверждает, что их набор микросхем для радара 4D-изображения может существенно снизить стоимость и энергоэффективность по сравнению с универсальной реализацией FPGA. Однако NXP воздержалась от указания степени снижения затрат / мощности.
Фил Мэгни, основатель и президент VSI Labs, сказал нам:«Мы внимательно следим за этим пространством уже несколько лет. По иронии судьбы, впервые я услышал об этом на презентации NXP несколько лет назад. В то время он был представлен как потенциальный конкурент лидару, поскольку новые радары могли создавать облако точек ».
Очевидно, NXP уже какое-то время планирует запуск радара с 4-мерным изображением.
Но позиция NXP меняется. Вместо того, чтобы просто говорить о своей способности создавать облака точек, компания теперь делает акцент на масштабируемости, предлагаемой набором ее новых радарных решений.
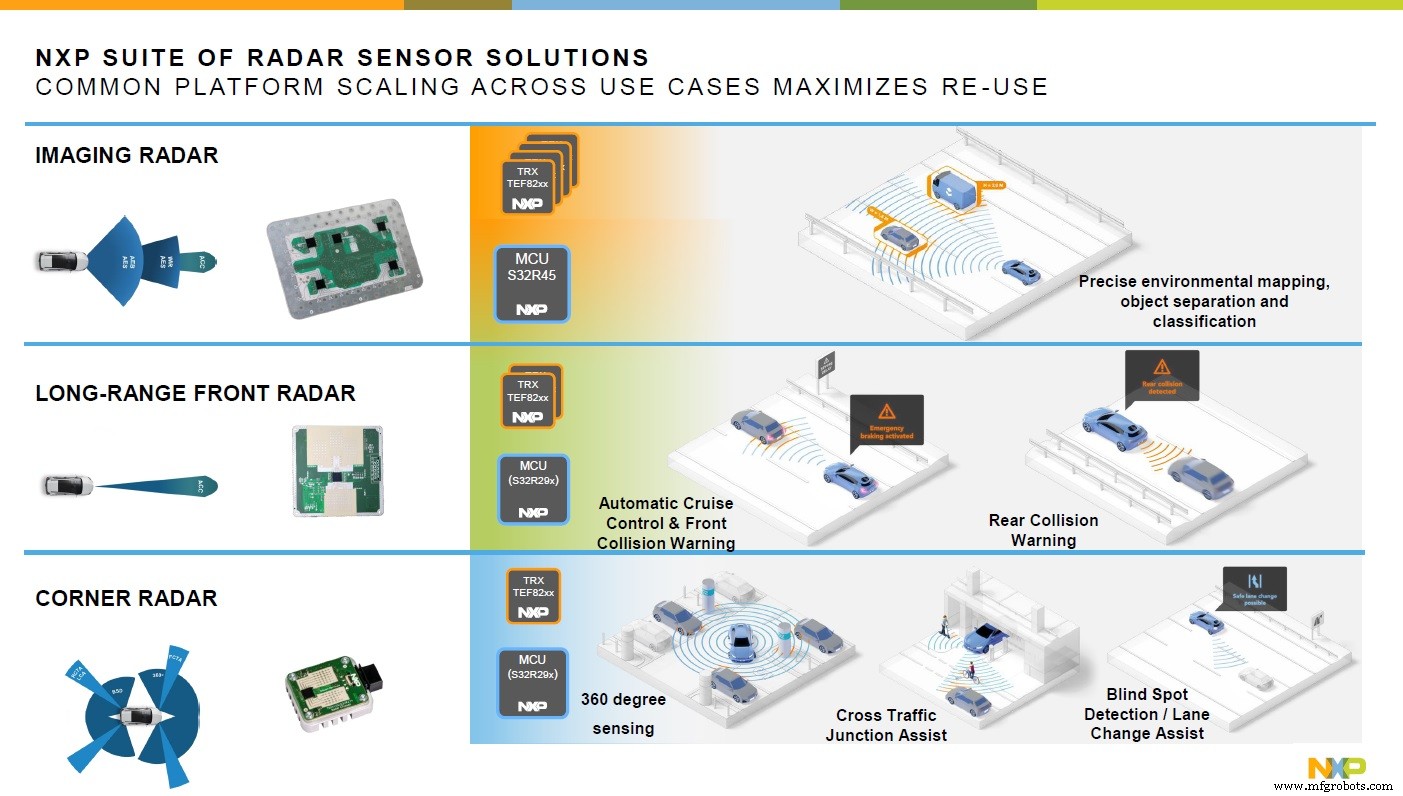
NXP теперь рекламирует «общую платформу, которая масштабируется для различных сценариев использования», начиная от углового радара и дальнего переднего радара до радара формирования изображений. Это важно для отрасли, которая ищет технологии для устранения требований Программы оценки новых автомобилей (NCAP), требующих лучшей производительности в слепых зонах и функций автоматического экстренного торможения. В то время как NCAP не указывает предпочтительные сенсорные технологии, автопроизводители, стремящиеся выполнить требования NCAP, ищут более совершенные радарные технологии, которые могут обнаруживать объекты в углу и спереди, объяснил Леманн.
щелкните, чтобы увидеть полноразмерное изображение
(Источник:NXP)
Для обнаружения слепых зон и ассистента движения по полосе в автомобилях Уровня 1 и 2 работает комбинация одного приемопередатчика NXP TEF82xx и радиолокационного процессора S32R45. Добавление автоматического круиз-контроля и предупреждения о лобовом и заднем столкновении для автомобилей L2 и L3 потребует два трансивера вместо одного. Для разделения и классификации объектов, требуемых автономными транспортными средствами L4 и L5, производители оригинального оборудования могут объединить четыре каскадных приемопередатчика с одним процессором радара.
Ключевым моментом является то, что на протяжении всего перехода к более высокой степени автоматизации автопроизводители, которым приходится работать с разными брендами и моделями, должны иметь возможность использовать единую платформу, предназначенную для повторного использования программного и аппаратного обеспечения.
Переход на радар с 4D-изображением
Однако эволюция автомобильных радаров омрачена маркетинговым жаргоном.
Традиционные радары - иногда их называют 2D - превратились в радары для построения изображений. «Визуализирующий радар, по сути, создает массив, благодаря которому плотность измерений резко возрастает», - пояснил Мэгни. «Традиционный 2D-радар груб по сравнению и дает только одну точку на объект. Но радар с отображением может дать много точек, чтобы лучше понять, что отслеживается ». Подводя итог, он отметил:«Визуализирующий радар обеспечивает вертикальное разрешение, в то время как традиционный радар работает с одной плоскостью».
Чем же тогда отличаются радары с трехмерным и четырехмерным изображением?
«Я думаю, что время используется в четвертом измерении. Я слышал это и от нескольких других компаний, и вот как они это используют », - отметила Мэгни. Но он добавил:«Честно говоря, 4D - это больше маркетинговая шумиха, чем что-либо еще, потому что элемент времени происходит от Доплера. Так что, если бы это было так, то традиционное 2D можно было бы назвать 3D ».
Другими словами, время всегда было критически важным для того, что предлагают радары. Отвечая на тот же вопрос, Леман из NXP отметил, что четвертым элементом датчика изображения 4D является «поперечное разрешение». Радиолокатор 4D-изображений лучше захватывает окружающую среду, определяя, может ли транспортное средство пролететь над объектом или под ним.
Разрешение широты
«Более высокое разрешение по широте» означает более высокое вертикальное разрешение, - отметил Мэгни. «Это само по себе является одной из наиболее важных особенностей».
Это обсуждение напоминает случай Джошуа Брауна. Седан Tesla Model S Брауна убил водителя, столкнувшись с тягачом, пересекавшим его путь на шоссе 27A в США во Флориде в мае 2016 года. Широко сообщается, что Tesla, оснащенная камерами и традиционным 2D-радаром, предполагала, что автомобиль может попасть под гигантская установка, и въехал прямо в нее.

На фото видна правая сторона полуприцепа. Область в красном овале выделяет повреждения от столкновения Tesla S. Джошуа Брауна (Источник:Национальный совет по безопасности на транспорте)
Мог ли датчик изображения 4D предотвратить такую смертельную аварию? Магни сказал:«Да, этот тип радаров не будет подвержен ложным срабатываниям, исходящим от традиционных радаров. И это не допустило бы аварии Tesla ».
Высокопроизводительные трансиверы и радиолокационная обработка
Новый TEF82xx от NXP - 75 x 75 мм - основан на RFCMOS второго поколения, основанном на техпроцессе 40 нм. Компания утверждает, что она может удвоить РЧ-характеристики для улучшения восприятия по сравнению с предыдущей версией.
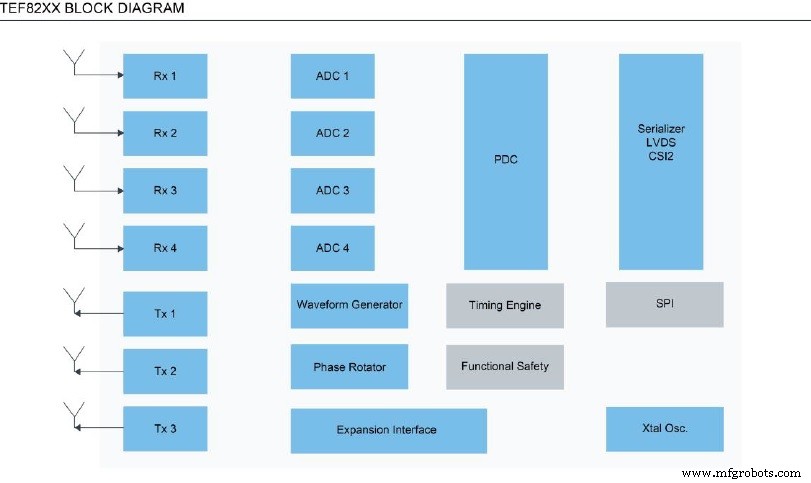
Новый чип приемопередатчика также обеспечивает 4-кратное снижение фазового шума вокруг цели, что позволяет лучше разделить объекты. Он поставляется с 6-битным фазовращателем для приложений управления лучом и поддержкой расширенной модуляции MIMO.
Новый радар S32R45 компании NXP построен по 16-нм техпроцессу FinFET. По заявлению компании, он предлагает поддержку каскадных приемопередатчиков с увеличением до 4х для «точного отображения окружающей среды и улучшенного понимания сцены» в транспортных средствах L4 и L5.
щелкните, чтобы увидеть полноразмерное изображение
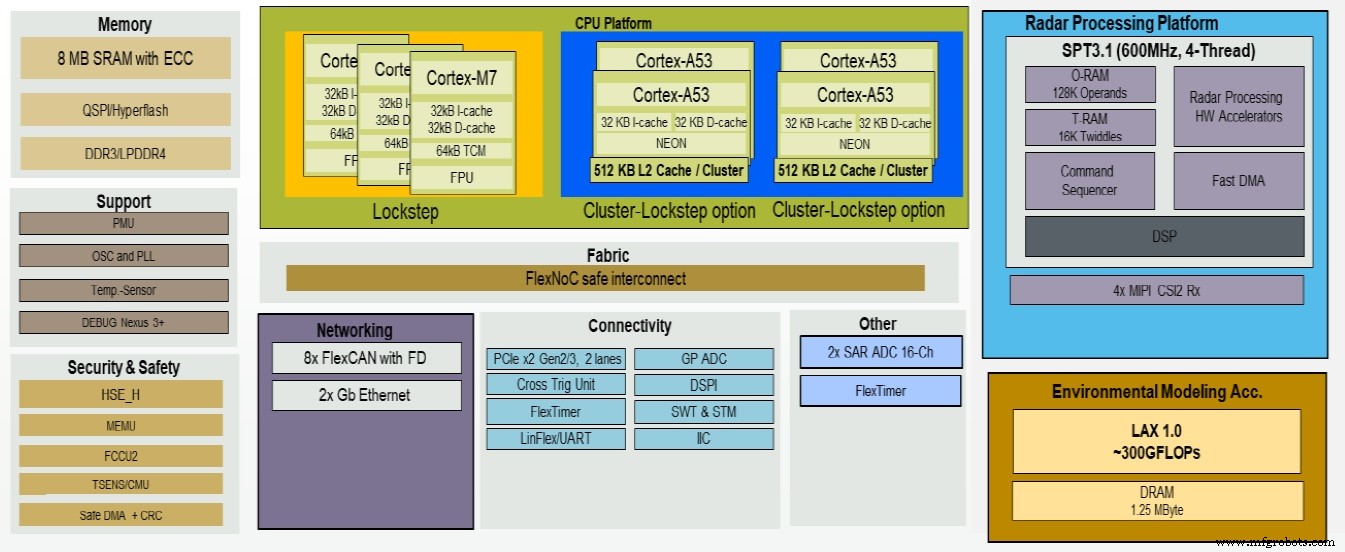
Блок-схема S32R45. (Источник:NXP)
Важно отметить, что S32R45 способен на новые радиолокационные ускорения. В частности, он предлагает новый «радарный ускоритель линейной алгебры», обеспечивающий до 64 раз производительность по сравнению с ядром ARM A53, согласно NXP. Это означает выполнение «алгоритмов направления прибытия со сверхвысоким разрешением (DoA) и истинную работу MIMO даже в неблагоприятных погодных условиях», - заявила NXP.
Возобновление дебатов:лидар против радара
NXP утверждает, что ее новый радар с 4D-изображением обеспечивает угловое разрешение менее 1 градуса. Но как это сравнить с лидаром?
Леман отметил:«Если вы говорите о высокопроизводительном лидаре - например, о механическом вращающемся лидаре, используемом Waymo, он может создавать много гранулированных облаков точек, поскольку обеспечивает угловое разрешение менее 0,1 ° или 0,5 °». Он добавил, но такой лидар «громоздкий и стоит тысячи долларов».
Мэгни заметил:«Ходят слухи, что Tesla рассматривает возможность построения радара для платформы Model 3, и это было бы хорошим шагом, потому что он дает лучший ответ на вопрос об отказе от лидара». Разборка System Plus Consulting показала, что Tesla использовала 2D-радар Continental, как сообщает EE Times . .
Однако, по словам Мэгни, Tesla перешла с Continental на Bosch для увеличения дальности действия. Он пояснил, что это оба 2D-радара с ограничениями традиционных радаров. «Насколько я понимаю, переход Tesla к использованию радаров для формирования изображений был бы разумным. Поймите, что радар формирует облако точек. Несмотря на то, что он имеет более низкое разрешение, чем лидар, [все же] он является огромным улучшением по сравнению с традиционным радаром », - сказал Мэгни.
Вкратце, однако, Мэгни подчеркнула:«Я пока не собираюсь бросать лидар под автобус».
По его мнению, лидар сейчас имеет огромное преимущество перед радаром, хотя этот пробел может быть сокращен с новыми радарами. «Одно из ключевых применений лидара - это его способность выполнять относительную локализацию по базовой карте. Это жизненно важно для городских роботакси и шаттлов, и я не думаю, что вы могли бы заменить лидар для этой задачи ».
Мэгни заключил:«Лидар не исчезнет, даже если появится 4D-радар. Можно сказать, что новые радары не заменяют лидар, а преодолевают некоторые ограничения традиционных радаров ».
Доступность
Новый набор микросхем для радаров NXP, образец которого сегодня представлен, поступит в серийное производство в 2021 году. Угловой радар, передний радар и радар с 4D-изображением будут выпущены в течение нескольких месяцев в 2021 году, но все три будут доступны во второй половине, сказал Леман. Он отказался комментировать цены.
>> Эта статья была первоначально опубликована на наш дочерний сайт EE Times.
Встроенный
- Класс и объект С#
- Одноэлементный класс Java
- Apacer представляет новую идентификацию промышленного продукта
- Microchip:решение на основе FPGA PolarFire позволяет создавать видео и изображения 4K с наименьшим форм-фактором
- Kymati разрабатывает индивидуальные решения для радаров
- Представлен процессор автомобильных радаров со скоростью 30 кадров в секунду
- Радиолокационный чип с низким энергопотреблением использует нейронные сети с пиками
- Горизонт Манхэттена:компактный ARM COM с NXP i.MX 8MM
- congatec:новый модуль SMARC с процессором NXP i.MX 8M Mini
- Kit предоставляет платформу разработки mmWave