


В чем реальная разница между автономным роботом и HMI?
Автономные роботы - это любой робот, который выполняет задачу или поведение под ограниченным контролем человека. Хотя это новая технология, роботы уже работают таким образом во многих обстоятельствах - к сожалению, все они представляют собой сильно структурированные операции массового производства. Для производителей, у которых больше вариаций в деталях, или для предприятий, которые просто не работают в структурированной среде, автономные роботы действительно являются следующим шагом в автоматизации.
Однако в спешке провозгласить автономное «превосходство» многие компании отказались от фундаментального принципа ограниченного надзора в неструктурированных средах и вместо этого выбрали HMI - человеко-машинные интерфейсы. Это интерфейсы, которые обычно полагаются на сенсорные экраны или простые пользовательские интерфейсы, с помощью которых люди могут устанавливать параметры для определенных операций, позволяя роботам адаптироваться в ограниченных обстоятельствах (т.е. все детали имеют одинаковую форму) без необходимости дополнительного программирования.
Помня об этом ключевом различии, важно понимать, что такое автономный робот, а что просто решение на основе HMI, построенное на индивидуальной интеграции. Некоторые из соображений заключаются в следующем:
- Автономные роботы работают в различных неструктурированных средах, в то время как HMI полагаются на определенные рабочие процессы с явными командами.
- Автономные роботы позволяют штатным инженерам развивать системы с течением времени, в то время как человеко-машинный интерфейс только всех поставщиков решений обеспечивает разовую интеграцию.
- Автономные роботы могут принести пользу, превышающую ту, которую может ожидать человеческий надзор, в то время как человеко-машинный интерфейс явно управляется и контролируется оператором.
Автономные роботы работают в разнообразных неструктурированных средах
Автономные роботы полезны прежде всего потому, что они могут работать на основе параметров и моделей процессов. Вместо того, чтобы требовать особого программирования для каждого действия, которое они предпринимают. Они могут перемещаться и реагировать на окружающую среду, соблюдая ограничения и базовое моделирование, а также принимая информацию из интегрированных и связанных систем.
Например:программируемый контроллер доступа в производственном цехе может указывать положение деталей, висящих на конвейере, и даже указывать конвейеру запускаться и останавливаться, когда он находится перед автономным роботом. В зависимости от того, как робот воспринимает продукт, на котором он работает, этот робот может затем выполнить процесс (будь то окраска, сборка, сварка или другие важные дополнительные элементы) и впоследствии адаптироваться к различным деталям по мере их поступления.
В этом случае робот полностью интегрирован с другими промышленными системами управления, что позволяет ему действовать скоординированно и разумно, имея при этом возможность работать с широкими общими инструкциями, а не конкретными деталями для каждой части.
Человеко-машинный интерфейс создан специально для отдельных рабочих процессов
HMI настолько прост, насколько может быть интерфейс робота, но простота сама по себе не всегда хорошо. Например, если ваш HMI слишком прост, вы можете упустить определенные параметры оптимизации процесса или, что еще хуже, разрешить соблюдение только определенных частей и рабочих процессов, в то время как такое функционирование может быть полезно не для каждого контекста или типа. производителя.
Например, у вас может быть установлен HMI для сборки или покраски различных больших окон и дверей. В конечном счете, HMI может быть охвачен окном определенной части в пределах досягаемости - скажем, двери высотой до 10 футов и оконные рамы длиной до 6 футов. Если детали никогда не превышают или не противоречат этим спецификациям, HMI может быть рентабельным решением (хотя интеграция по-прежнему может быть дорогостоящей). Однако, как только появится 11-футовая дверь или 7-футовая оконная рама, ад может вырваться наружу.

Автономный робот может дать инженерам новые модели процессов и возможности
В конечном итоге способность автономного робота к работе зависит от надежности его моделей процессов и его способности интегрироваться с периферийными датчиками и оборудованием. Там, где это возможно, интегрированные среды разработки могут дать автономным роботам возможность изучать новые приложения в соответствии со спецификациями инженеров без необходимости полностью реинжиниринга их исходного поставщика для каждого приложения.
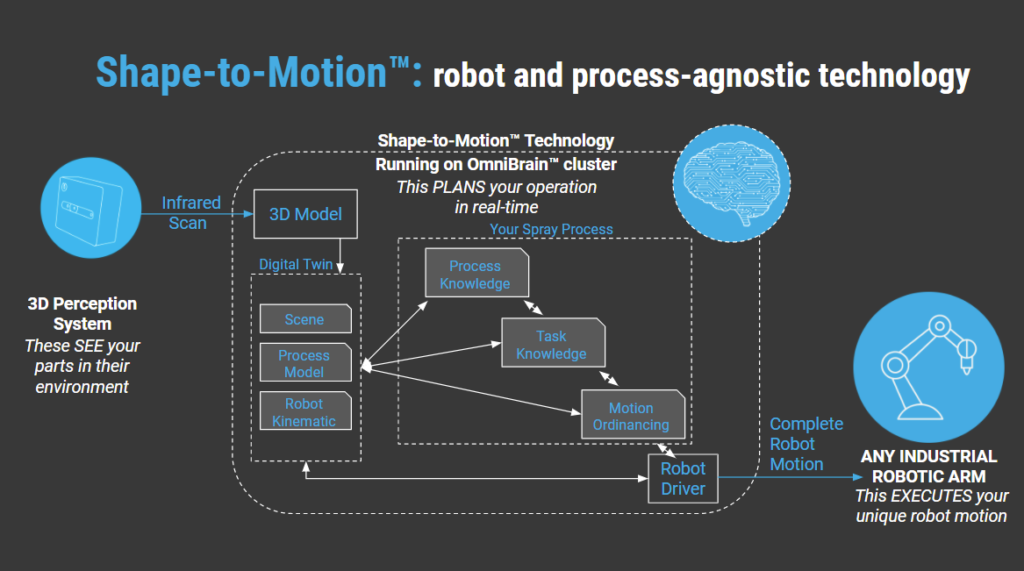
Например, технология автономной робототехники Shape-to-Motion ™ компании Omnirobotic построена так, чтобы не зависеть как от роботов, так и от процессов, что означает, что любое необходимое оборудование или компоновка может быть однажды решена с помощью той же логики планирования движения, которая настроена для вашего индивидуального объекта. При использовании HMI ограничения здесь могут быть ощутимыми, поскольку для каждой интеграции может потребоваться собственное планирование движения и стратегия процесса, основанная на тех же традиционных моделях программирования, которые в настоящее время ограничивают интеграторов в развертывании роботов в средах с большим количеством участников.
Человеко-машинный интерфейс создается исключительно исходным поставщиком
HMI - это, по сути, универсальный инструмент для очень специфических деталей и приложений. Их редко можно адаптировать или улучшить без полной замены. Они не всегда могут быть правильными инвестициями, потому что, в конечном итоге, производство развивается быстрее, чем когда-либо, а это означает, что способ обработки деталей может быть вынужден измениться, чтобы удовлетворить строгие требования клиентов. Чем дольше вы не сможете адаптироваться, тем больше вероятность, что это сделает кто-то другой.
Таким образом, большинство человеко-машинного интерфейса могут быть построены и модифицированы только оригинальными интеграторами. Обычно попытки адаптировать эти системы к новым макетам делают их практически бесполезными. В мире, где гибкое производство более важно для повседневного успеха, действительно ли человеко-машинный интерфейс может соответствовать требованиям?

Автономный робот обеспечивает дополнительную ценность, помимо того, что может подтвердить человеческий контроль
Ядро автономных производственных роботов - это автономное движение. Это означает, что для определенных процессов более высокая точность может быть достигнута для любого приложения, независимо от фактических инструкций для робота.
Почему это так? Рассмотрим, например, кривую. Хотя традиционный инструмент программирования может позволить программисту задавать разные точки и определять радиус, в большинстве случаев требуется двухточечное программирование, которое не всегда устанавливается под фиксированным углом по сравнению с обрабатываемой поверхностью. В случае автономного робота машина может разбить трехмерную реконструкцию изогнутой поверхности и обработать бесконечно точное движение робота за секунды.
Факт остается фактом:с HMI вы можете просто не получать высококачественные программы - и это нормально. Человеческие существа не были посажены на эту землю для программирования роботов - по крайней мере, не до повседневных уровней детализации, которые очень часто приводят к проблемам с качеством, переделкам и отказам, с которыми производители борются при традиционном развертывании.
Человеко-машинный интерфейс автоматизирует только операции, но каждое добавление ценности должно управляться оператором
ЧМИ каждый раз запрашивают инструкции и работают на основе определенных последовательных инструкций. Хотя могут быть исключения, HMI явно не функционируют «автономно», и хотя многие «провайдеры автономии» могут утверждать, что предоставляют это, то, что они часто делают, предоставляет сложный HMI, который фактически ограничивает рабочие процессы и средства разработки, которые производитель может использовать для достижения своих технологических целей.
Вы производитель, который ценит производительность? Ожидаете ли вы высококачественных результатов независимо от того, какой процесс вы используете? Вы хотите адаптироваться к изменениям рынка без необходимости полностью рекапитализировать свои предприятия? Во всех этих обстоятельствах HMI могут быть ответом, но автономные роботы ОПРЕДЕЛЕННО едины.
Omnirobotic предоставляет технологию автономной робототехники для процессов распыления, позволяя промышленным роботам видеть детали, планировать свою собственную программу движения и выполнять важные промышленные процессы нанесения покрытий и отделки. Посмотрите, какую окупаемость вы получите здесь или узнайте больше о том, как вы можете извлечь из этого пользу автономные производственные системы .
Промышленный робот
- В чем разница между массовым и нестандартным производством?
- Что может и что не может автономный робот
- Какова реальность видения роботов?
- Что, черт возьми, такое самопрограммирующийся робот?
- В чем разница между облаком и виртуализацией?
- В чем разница между веб-хостингом и облачным хостингом?
- В чем разница между AU и OEE?
- В чем разница между изготовлением металла и сваркой?
- В чем разница между опалубкой и опалубкой?
- В чем разница между электронным и электрическим?