


Полностью автоматический контроллер уровня воды с использованием SRF04
Полностью автоматический контроллер уровня воды с использованием SRF04, L293D и PIC16F84A
Введение в автоматический контроллер уровня воды
Мониторинг и контроль уровня воды в резервуарах для воды является одной из самых важных работ практически во многих жилых и коммерческих помещениях. В большинстве случаев, особенно в жилых домах, из-за отсутствия каких-либо автоматических средств становится утомительно и неудобно часто контролировать уровень воды в баках. На самом деле, для мест с нехваткой воды перелив воды будет довольно дорогой вещью.
Единственным решением вышеуказанной проблемы является автоматический способ отслеживания и контроля уровня воды. Несмотря на то, что существует множество методов, таких как использование датчиков расстояния, использование датчиков тока, использование ультразвукового дальномера и т. д., здесь мы сосредоточимся на использовании ультразвукового дальномера.

- Связанный проект: Схема сигнализации дождя — проект детектора снега, воды и дождя
Обзор системы контроллера уровня воды
Система состоит из ультразвукового датчика дальности, размещенного в верхней части резервуара, который после срабатывания посылает ультразвуковой сигнал. Вода, присутствующая в резервуаре, будет отражать сигнал. Датчик получит этот сигнал, и время, прошедшее между этими двумя сигналами, даст оценку расстояния, пройденного сигналами, то есть уровня воды сверху.
Здесь микроконтроллер используется для отправки триггерного сигнала на ультразвуковой дальномер. После получения эхосигнала вычисляется временная задержка между двумя импульсами, которая прямо пропорциональна уровню воды. Временная задержка рассчитывается с помощью таймера, количество счетных импульсов которого обозначает расстояние, пройденное сигналом, или уровень воды.
Поскольку здесь рейнджер находится сверху резервуара, управление потоком воды осуществляется с учетом уровня воды сверху резервуара. Например, если измеренный диапазон находится в пределах от 0 до 1 см, бак переполнен, и микроконтроллер посылает управляющий сигнал для вращения двигателя в обратном направлении, чтобы удалить избыток воды. ‘
Если диапазон составляет от 2 до 5 см, бак заполнен, и микроконтроллер отправляет управляющий сигнал на отключение двигателя. Если диапазон превышает 5 см, бак почти пуст, и микроконтроллер отправляет управляющий сигнал для вращения двигателя вперед.
- Ультразвуковой дальномер SRF04
- Микроконтроллер PIC PIC16F84A
- Драйвер двигателя L293D
- Двигатель постоянного тока
- Два резистора 1K
- Это была бы простая и удобная система.
- Это будет недорогая система из-за использования недорогих компонентов.
- Использование автоматического метода устранит препятствия, с которыми приходится сталкиваться при контроле уровня воды с помощью ручных средств.
- Поскольку механические детали не используются, это исключает риск механического износа или коррозии.
- Ультразвуковой дальномер SRF04 будет подвержен демпфированию из-за использования большого количества электроники, поэтому его необходимо надлежащим образом изолировать.
- Эта система разработана таким образом, что датчик и привод необходимо размещать рядом друг с другом. Говоря простым языком, эта система управления предназначена для мест, где резервуар для воды находится рядом с водяным насосом. Таким образом, для многих зданий, где используются погружные насосы, а резервуары для воды находятся на крышах, эта система автоматического контроля уровня воды нельзя использовать. Однако это можно изменить с помощью канала связи.
Схема цепи автоматического регулятора уровня воды
Нажмите на изображение, чтобы увеличить
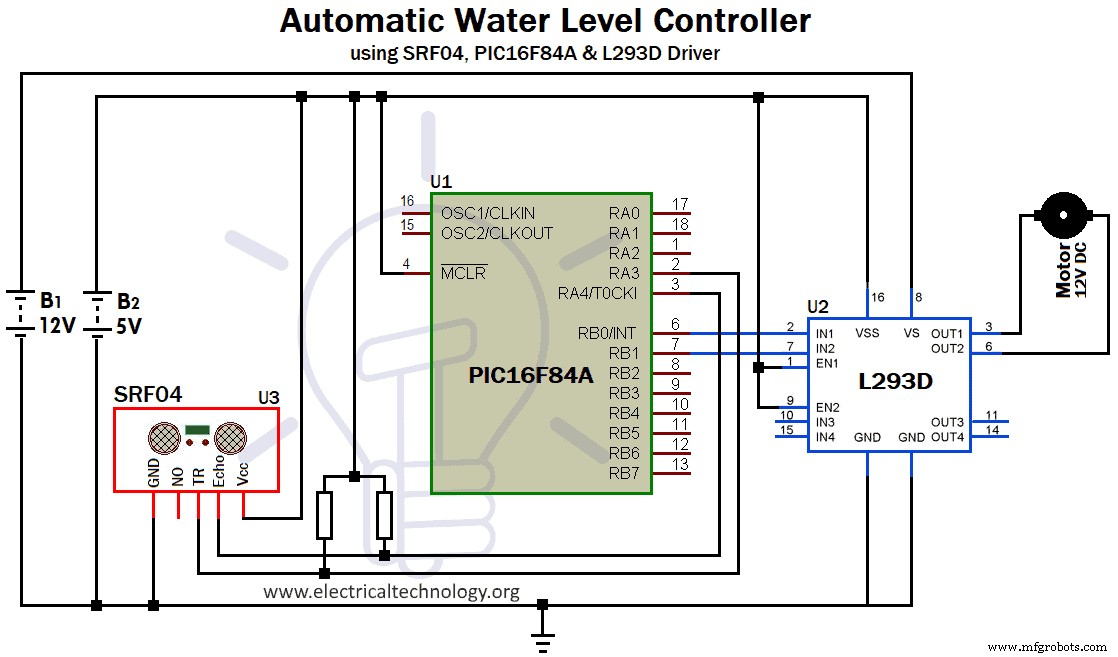
Рисунок 1. Контроллер уровня воды
Описание частей
Для проектирования схемы будут использоваться следующие компоненты.
Давайте кратко расскажем о каждом компоненте
Ультразвуковой дальномер SRF04 :
SRF04 — это высококачественный ультразвуковой дальномер, который используется во многих робототехнических приложениях для легкого обнаружения препятствий. Для срабатывания требуется сигнал длительностью 10 микросекунд. 
Рисунок 2. Ультразвуковой дальномер SRF04
После срабатывания он посылает 8 ультразвуковых импульсов с частотой 40 кГц и одновременно посылает эхо-линию в состояние ВЫСОКИЙ. Как только он получает отраженный сигнал или эхо, он понижает линию эха до НИЗКОГО уровня.
Таким образом, ширина эхо-импульса обозначает расстояние, пройденное сигналом, или, другими словами, расстояние от рейнджера до объекта. Таким образом, эхо-линия представляет собой импульс, ширина которого пропорциональна расстоянию до объекта. Для 1 см ширина эхо-импульса составит 58 микросекунд. 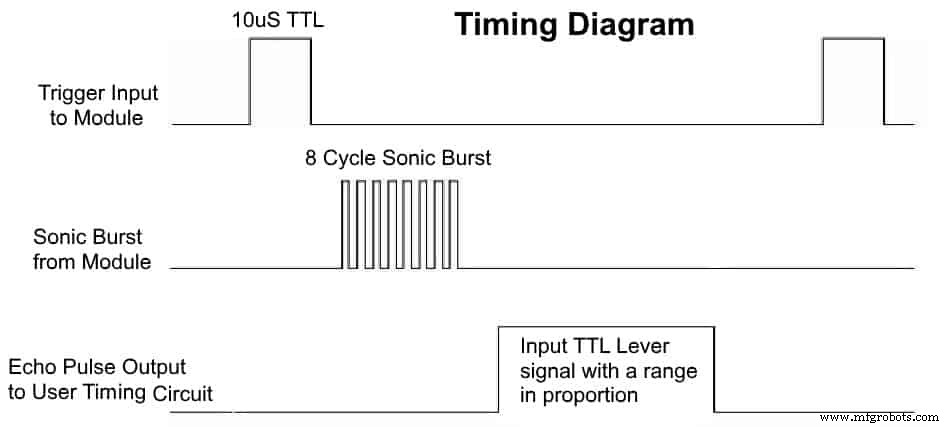
Рис. 3. Временная диаграмма SRF04
Микроконтроллер PIC PIC16F84A:
Рис. 4. Микроконтроллер PIC PIC16F84A
Это CMOS-совместимый 8-разрядный 18-контактный флэш-микроконтроллер с одним 8-разрядным таймером (с 8-разрядным программируемым предделителем). Работа Таймера управляется с помощью следующих регистров – OPTION_REG, TMR0 и INTCON. OPTION_REG — это 8-битный регистр, 5 th бит (T0CS) выбирает требуемую операцию таймера или счетчика.
Установка бита выбирает операцию счетчика, тогда как его очистка выбирает работу таймера. TMR0 — это регистр таймера, тогда как INTCON — это регистр прерывания, 5
ый
бит (T0IE) обозначает флаг таймера, т.е. он устанавливается, когда таймер переполняется. 
Драйвер двигателя L293D:
Рисунок 5:ИС драйвера двигателя L293D
Это 16-контактная микросхема драйвера двигателя постоянного тока на основе H-моста. Он может управлять двумя двигателями в обоих направлениях. Он состоит из двух контактов включения (Pin1 и 9), которые при установке в состояние HIGH разрешают работу микросхемы. Он в основном действует как интерфейс между микроконтроллером и двигателем постоянного тока. Он состоит из четырех входных контактов — по два на каждую схему Н-моста. Ниже приведена таблица, обозначающая управление двигателем. 
| IN1 (контакт 2) | IN2 (контакт 7) | EN1 (контакт 1) | Привод |
| ВЫСОКАЯ | ВЫСОКАЯ | ВЫСОКАЯ | ВЫКЛ |
| НИЗКИЙ | НИЗКИЙ | ВЫСОКАЯ | ВЫКЛ |
| ВЫСОКАЯ | НИЗКИЙ | ВЫСОКАЯ | ВКЛ (по часовой стрелке) |
| НИЗКИЙ | ВЫСОКАЯ | ВЫСОКАЯ | ВКЛ (против часовой стрелки) |
| X | Х | НИЗКИЙ | ВЫКЛ |
Примечание. Поскольку SRF04 является TTL-совместимым устройством, а PIC16F84A — CMOS-совместимым, мы используем подтягивающий резистор номиналом 1 кОм, чтобы компенсировать изменение уровня напряжения.
Работа и работа автоматического контроллера уровня воды
Программа написана таким образом, что микроконтроллер отправляет 10-микросекундный импульс для запуска ультразвукового дальномера. Это написано с использованием функции задержки. Регистр таймера TMR0 загружается десятичным значением 200, так что он делает 55 отсчетов.
Выходной сигнал SRF04, эхо-сигнал поступает на контакт RA4 (синхронизирующий контакт таймера, что обеспечивает подачу внешнего тактового импульса на таймер). Как только эхо-сигнал переходит от ВЫСОКОГО к НИЗКОМУ, таймер активируется. По мере подсчета таймера отслеживается бит флага прерывания T0IE. После установки таймер деактивируется.
Процедура повторяется для другого эхо-импульса и так далее. Подсчитывается количество срабатываний таймера, и это обозначает количество эхо-импульсов. Поскольку каждый эхо-импульс длится 58 микросекунд, он соответствует 1 см. Таким образом, 5 эхо-импульсов будут обозначать 5 см. Значение этого счетчика, сохраненное в виде целого числа, используется для управления двигателем постоянного тока.
Если значение находится в диапазоне от 2 до 5, микроконтроллер посылает сигналы HIGH на контакты RB0 и RB1 (соответственно подключенные к IN1 и IN2 L293D), чтобы выключить двигатель. Если значение находится в диапазоне от 5 до 20, микроконтроллер посылает сигнал ВЫСОКИЙ на вход IN1 и сигнал НИЗКИЙ на вход IN2, чтобы включить двигатель и вращать его по часовой стрелке. Если значение находится в диапазоне от 0 до 1, микроконтроллер посылает сигнал LOW на IN1 и сигнал HIGH на IN2, чтобы включить двигатель и вращать его против часовой стрелки.
Преимущества автоматического контроллера уровня воды с использованием SRF04
Недостатки автоматического контроллера уровня воды
Промышленные технологии
- Использование безводных технологий в процессе окрашивания
- 4 преимущества использования интеллектуального решения для обнаружения утечек в зданиях
- 5 преимуществ использования системы обнаружения утечек воды на базе Интернета вещей Biz4intellias в промышленности…
- Интеллектуальный мониторинг и контроль уровня воды для эффективного управления водными ресурсами
- 7 преимуществ использования интеллектуального решения для мониторинга уровня Biz4Intellia
- Использование системы мониторинга уровня реки на основе IoT для эффективного управления водными ресурсами
- Является ли полиуретан водонепроницаемым?
- Ручной или автоматический список материалов
- 7 преимуществ полностью/полуавтоматической кухни для облачных кухонь
- Что такое автоматический водяной насос?