


Слепой навигатор палки
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
| |||
|
Об этом проекте
История началась, когда я увидел слепых людей, которые изо всех сил пытались пройти через препятствия, такие как дорожная яма, лестницы и т. Д., С их традиционной слепой тростью. Это действительно побудило меня попробовать построить этот прототип, хотя я недостаточно разбираюсь в электронных устройствах. Используя различные источники в Интернете, мне удалось завершить его в прошлом году в рамках моего последнего года проекта. Кроме того, я также улучшил прототип, добавив местоположение GPS. Благодаря 1Sheeld, это действительно помогло мне закончить этот прототип за 6 месяцев.
Шаг 1
Чтобы включить Blind Stick Navigator, он должен получать питание от внешнего источника. Я использую 9-вольтовую батарею для ознакомления с ее отключением. Судя по тому, что я видел, недостатком моего прототипа было долгосрочное энергопотребление. Таким образом, ему как-то нужно улучшение, такое как солнечная панель / питание.
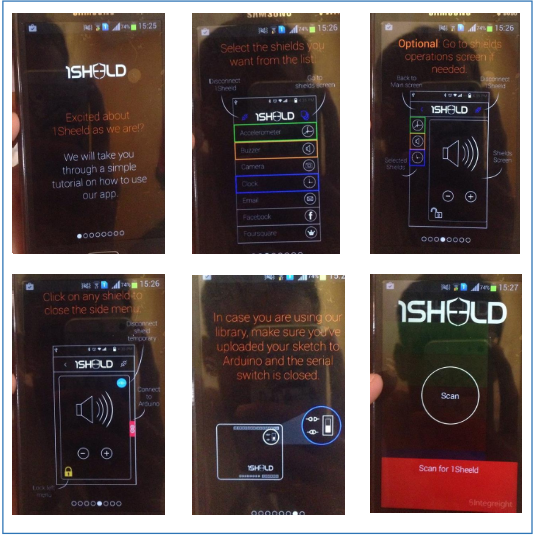
Шаг 2
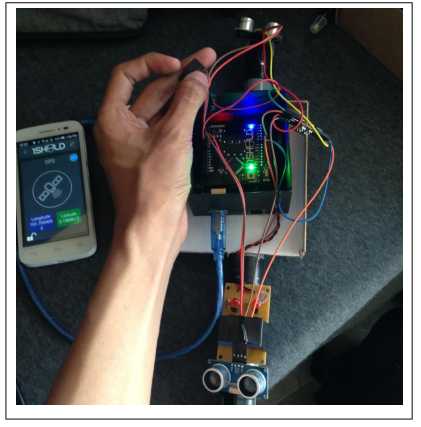
После включения с помощью аккумулятора, который подключается к адаптеру питания USB на микроконтроллере Arduino Uno, опекун должен всегда позволять соединению Bluetooth (смартфон Android) подключаться к микроконтроллеру. Затем вам нужно открыть приложения 1Sheeld, которые уже установлены на смартфоне, и включить функции GPS и SMS.
** Да, я знаю, что слепые люди не могут видеть и получать доступ к смартфону, но, по крайней мере, если мне или вам удастся внести изменения в смартфон на ОС Android, это значительно упростит работу. Я уже изо всех сил старался найти лучший смартфон с кнопкой Брайля, но мне это не удалось. Таким образом, я надеюсь, что в будущем будет обновление моего прототипа.
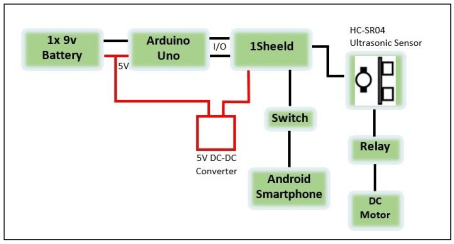
Шаг 3
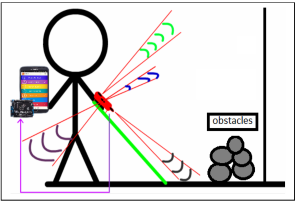
Судя по приведенной выше блок-схеме, как вы можете видеть, именно так происходит соединение между устройствами. После включения этих двоих слепые люди могут начать использовать Blind Stick Navigator. Основываясь на наблюдении на традиционной белой трости, слепые люди всегда будут вращать слепую трость, чтобы получить подтверждение от своего окружения. Но с Blind Stick Navigator он поможет им получать вибросигнал о препятствии в средней и нижней части прицела. Препятствие обнаружено с помощью ультразвукового датчика HC-SR04. Он был прикреплен к верхней и нижней части палки. Я использую трубу из ПВХ, потому что я могу поместить вибрирующий двигатель постоянного тока внутрь трубы из ПВХ. Режим вибрации можно изменить в коде, заданном с помощью программного обеспечения Arduino IDE.
Шаг 4
Кроме того, Blind Stick Navigator может определять долготу и широту местонахождения слепых. Это связано с тем, что смартфон выступает в качестве поставщика и предоставляет местоположение GPS для этого процесса. Тумблер является дополнительным, чтобы слепым людям было легче нажать кнопку экстренной помощи, чтобы сообщить получателю, что он / она уже потерялись или находятся в опасности. Если щелкнуть ее один или несколько раз, смартфон отправит сообщение о том, что ему нужна помощь, и выполните поиск по ссылке GPS и Google Map. Номер получателя может быть установлен независимо от того, хотите ли вы отправить сообщение органу власти или только опекуну слепых. Длина ручки регулируется в зависимости от роста пользователя. Для этого прототипа я использую определенную длину, и длину обнаружения можно изменить в коде.
Шаг 5
И последнее, но не менее важное:я надеюсь, что мой прототип будет использоваться во всем мире или будет коммерциализирован, что поможет слепым людям в их путешествии / жизни. Более того, я очень сожалею о своей грамматике, потому что я не очень хорошо владею английским. Я не знаю, чтобы описать больше в этом посте. Всю информацию я уже собрал во вложении. Вы можете узнать больше об этом проекте по ссылке, которую я предоставил ниже.
Документ проекта:
- FYP 1
- FYP 2
Афиша проекта:
- FYP 1
- FYP 2
Видео проекта:
- Видео 1
- Видео 2
Код
- OneSheeldBlindStickNavigator
OneSheeldBlindStickNavigator C / C ++
#define CUSTOM_SETTINGS #define INCLUDE_GPS_SHIELD # define INCLUDE_SMS_SHIELD / * Включить библиотеку 1Sheeld. * / # include#include #define trigPinL 4 # define echoPinL 5 # define echoPinL 5 # define echoPinL 5 # define echoPinL 5 # define echoPinL 5 #define trigPinL 4 # define echoPinL 5 #define #define Vib1 12 # define Vib2 13 #define SW 8 / * Определяет логический флаг. * / boolean isInRange =false; float lat; float lon; String PhoneNumber ="0134087286"; String Message; String Message1; String Message2; char latitude [10]; char longitude [10]; void setup () {pinMode (trigPinL, ВЫВОД); pinMode (echoPinL, ВХОД); pinMode (trigPinH, ВЫХОД); pinMode (echoPinH, ВХОД); pinMode (Vib1, ВЫХОД); pinMode (Vib2, ВЫХОД); pinMode (SW, ВХОД); / * Начать общение. * / OneSheeld.begin (); // Serial.begin (9600);} void loop () {long durationL, distanceL, durationH, distanceH, MixDist; digitalWrite (trigPinL, LOW); // Добавил эту строку delayMicroseconds (2); // Добавил эту строку digitalWrite (trigPinL, HIGH); delayMicroseconds (10); // Добавил эту строку digitalWrite (trigPinL, LOW); durationL =pulseIn (echoPinL, HIGH); distanceL =(durationL / 2) / 29,1; digitalWrite (trigPinH, LOW); // Добавил эту строку delayMicroseconds (2); // Добавил эту строку digitalWrite (trigPinH, HIGH); delayMicroseconds (10); // Добавил эту строку digitalWrite (trigPinH, LOW); durationH =pulseIn (echoPinH, HIGH); distanceH =(durationH / 2) / 29,1; // Serial.println (distanceL); // Serial.println (distanceH); // задержка (1000); если (расстояниеL> 40) {digitalWrite (Vib1, HIGH); } если (расстояниеL <40) {digitalWrite (Vib1, LOW); } если (distanceH <100) {digitalWrite (Vib1, HIGH); задержка (200); digitalWrite (Vib1, LOW); задержка (200); } / * Всегда проверяйте, находятся ли GPS смартфона и заданные долгота и широта в диапазоне 100 метров. * / //if(GPS.isInRange(30.0831008,31.3242943,100)) // {// if (! isInRange) // {/ * Отправить SMS. * / lat =GPS.getLatitude (); lon =GPS.getLongitude (); Сообщение1 =Строка (широта, 8); Сообщение2 =Строка (lon, 8); if (digitalRead (SW) ==0) {Сообщение ="Мне нужна помощь! Я нахожусь на широте:" + Сообщение1 + "и долготе:" + Сообщение2; Сообщение ="Карты Google - https://www.google.co.in/maps/place/" + Сообщение1 + "," + Сообщение2; SMS.send (Номер телефона, Сообщение); задержка (3000); } // isInRange =true; //} //} // else // {// if (isInRange) // {/ * Отправить SMS. * / // SMS.send ("+ 601123413946", "Смартфон вне зоны действия."); // isInRange =false; //} //} delay (1000);}
Схема
OneSheeldTONGKAT.fzzПроизводственный процесс
- Детектор языка TinyML на основе Edge Impulse и Arduino
- Игра с гироскопом Arduino с MPU-6050
- Цифровые игральные кости Arduino
- Рулетка DIY 37 LED
- Мини-аркада ATtiny85:Змейка
- Переносимый детектор дальности
- Реактивный настольный светильник для звука Arduino
- Умный автомобиль-робот с отслеживанием лиц
- Гальваника медью
- NeoMatrix Arduino Pong