


Удовольствие от гироскопа с кольцом NeoPixel
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Об этом проекте
В этом руководстве мы будем использовать MPU6050 . гироскоп, NeoPixel Кольцо и Arduino построить устройство, которое зажигает светодиоды, соответствующие углу наклона.
Это простой и увлекательный проект, который будет собран на макете. Если вы будете следовать инструкциям, вы создадите то, что видели в видео. Это хорошее руководство для изучения гироскопа и кольца NeoPixel.
Я создаю этот учебник из-за интереса, который я проявил к другому руководству по min. В этом уроке я заменил простые светодиоды на NeoPixel Ring. Кольцо проще использовать через библиотеку Adafruit, и оно определенно более впечатляющее.
Так что, если у вас есть эти компоненты, это отличный способ их использовать, я постараюсь провести вас шаг за шагом через создание устройства, а также объяснить, как оно работает, на последнем этапе.
Шаг 1. Необходимые действия
Детали
1. Arduino Pro Mini 328P
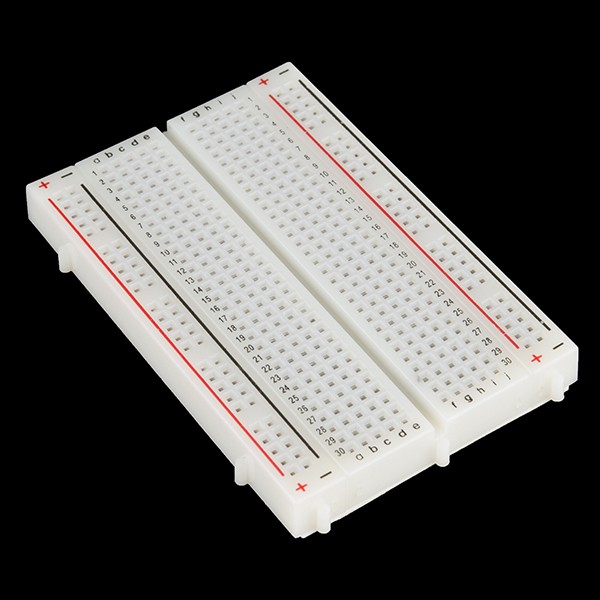
2. Макетная плата
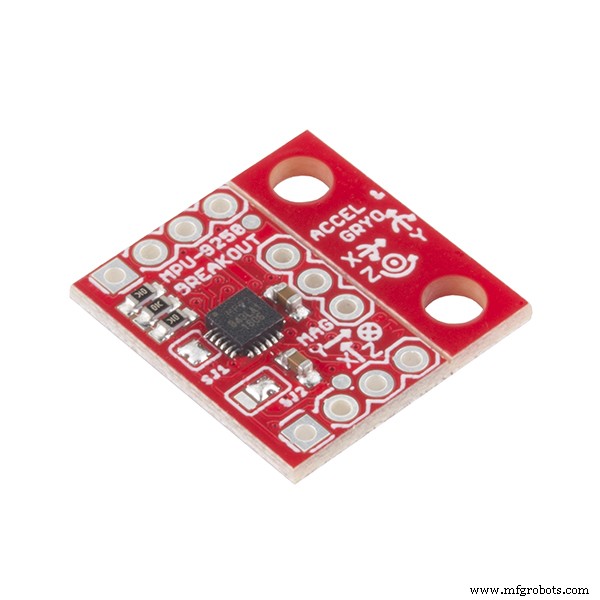
3. Гироскоп MPU6050
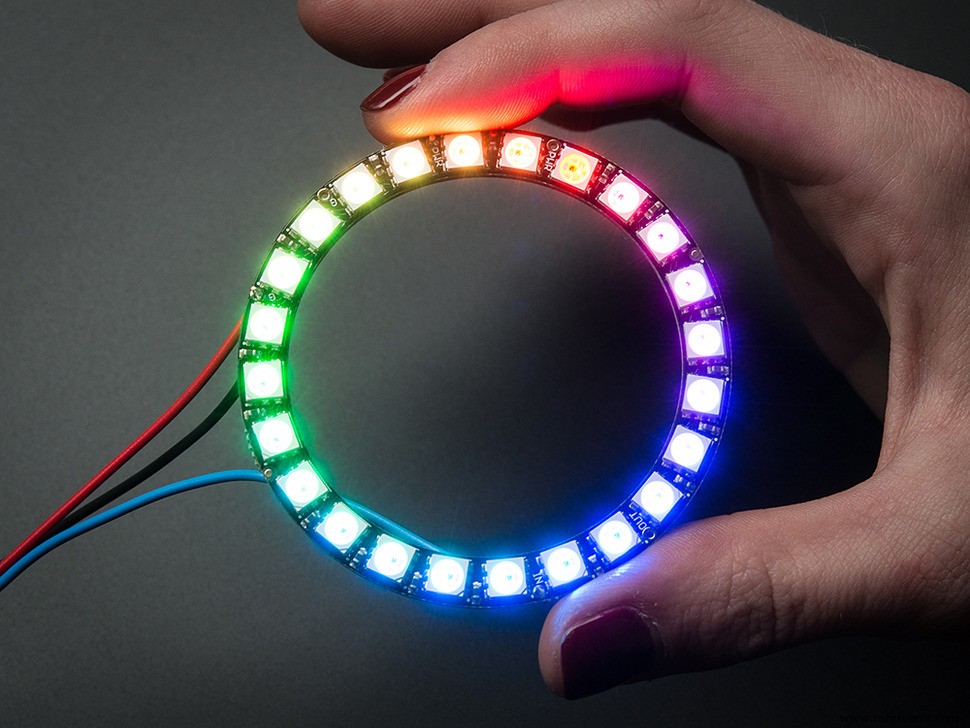
4. 24 светодиодных кольца NeoPixel
5. 4 батарейных блока AA с 4 батареями
6. П-образные соединительные кабели (опция). Я использовал эти перемычки, потому что они лучше смотрятся на макетной плате, и светодиоды в этом случае лучше видны. Вы можете найти коробку 140 на ebay примерно за 4 доллара. Если у вас нет этих кабелей, вы можете заменить их проводами Dupont.
Инструменты:
1. Переходник с USB на последовательный FTDI FT232RL для программирования arduino pro mini
2. IDE Arduino
Навыки:
1. Пайка
3. Основы программирования на Arduino
Шаг 2. Сборка
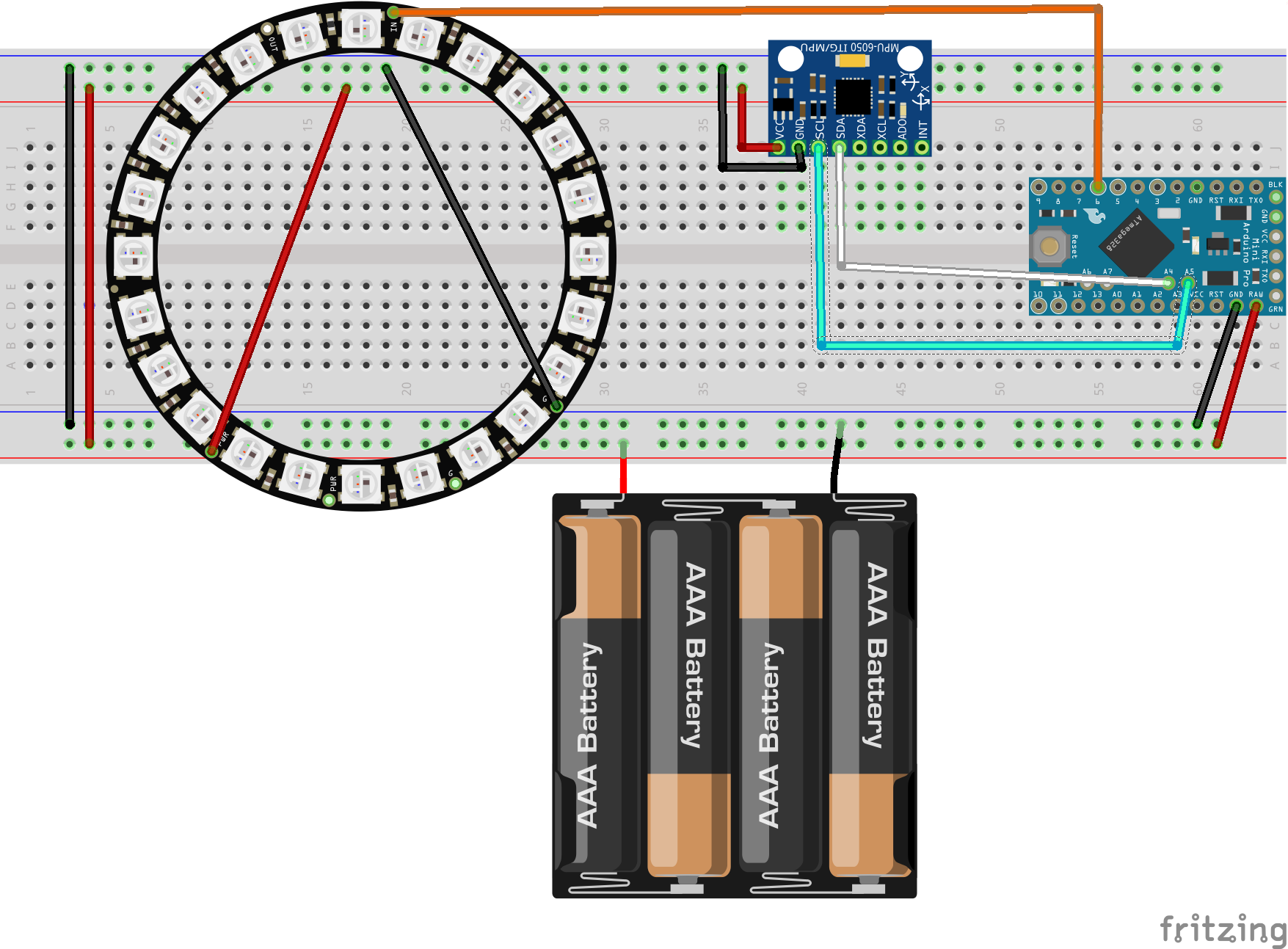

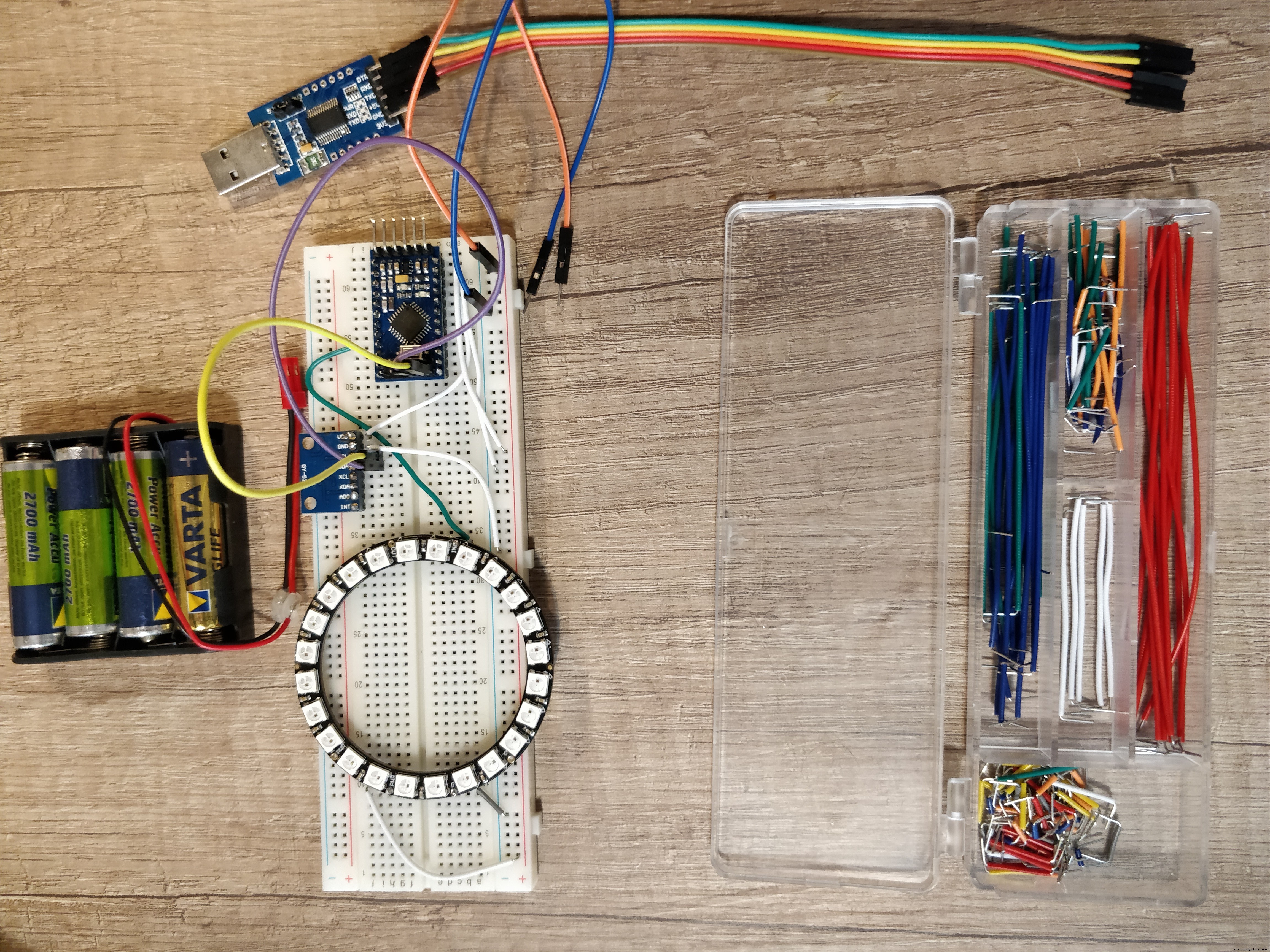
Я приложил схему фритзинга в формате fzz и ее изображение для облегчения визуализации соединений.
1. Вам нужно припаять 3 штыря к задней части кольца neopixel, как показано на картинке
- припаять плюсовой вывод
- припаять землю
- припаять контакт ввода данных
2. Затем у держателя 4х батарей должен быть способ подключения к макетной плате. Простое решение - припаять к его клеммам два штыревых провода Dupont.
3. Подготовьте макет.
- поместите неопиксельное кольцо, микроконтроллер и гироскоп на макетную плату, как на изображении
- разместить все отрицательные провода:к микроконтроллеру, неопиксельному кольцу, гироскопу
- разместить все плюсовые провода:к микроконтроллеру, неопиксельному кольцу, гироскопу
- разместить все провода данных:
* SDA и SCL от микроконтроллера до гироскопа
* вывод D6 от микроконтроллера к неопиксельному кольцу
- дважды проверьте все соединения перед включением
- при желании с помощью клейкой ленты прикрепите аккумуляторный блок к задней части панели, чтобы закрепить его на месте и сделать его более портативным
Шаг 3. Код и калибровка
Первый вам необходимо скачать и установить две библиотеки:
1. Библиотека неопикселей Adafruit для управления неопикселями
2. Библиотека MPU6050 для гироскопа
Это две отличные библиотеки, которые сделают всю тяжелую работу!
Подробнее о неопикселях здесь
Тогда скачайте и установите мою библиотеку отсюда или скопируйте ее снизу:
#include "I2Cdev.h" #include #include "MPU6050_6Axis_MotionApps20.h" #include "Wire.h" #define NEOPIXED_CONTROL_PIN 6 #define NUM_LEDSGLE 24 const int; const int LED_OFFSET =12; MPU6050 mpu; Adafruit_NeoPixel strip =Adafruit_NeoPixel (NUM_LEDS, NEOPIXED_CONTROL_PIN, NEO_RBG + NEO_KHZ800); беззнаковый длинный lastPrintTime =0; bool initialization =false; // устанавливаем истину, если инициализация DMP прошла успешно uint8_t mpuIntStatus; // содержит текущий байт состояния прерывания из MPU uint8_t devStatus; // возвращаем статус после каждой операции с устройством (0 =успех,! 0 =ошибка) uint16_t packetSize; // ожидаемый размер пакета DMP (по умолчанию 42 байта) uint16_t fifoCount; // подсчет всех байтов, находящихся в данный момент в FIFO uint8_t fifoBuffer [64]; // буфер хранения FIFO Quaternion q; // [w, x, y, z] контейнер кватернионов VectorFloat gravity; // [x, y, z] вектор гравитации float ypr [3]; // [рыскание, тангаж, крен] yaw / pitch / roll контейнер и вектор силы тяжести volatile bool mpuInterrupt =false; // указывает, перешел ли вывод прерывания MPU в высокий уровень
void setup () {Serial.begin (9600); Serial.println («Программа запущена»); инициализация =initializeGyroscope (); strip.begin (); } void loop () {если (! инициализация) {возврат; } mpuInterrupt =false; mpuIntStatus =mpu.getIntStatus (); fifoCount =mpu.getFIFOCount (); если (hasFifoOverflown (mpuIntStatus, fifoCount)) {mpu.resetFIFO (); возвращение; } если (mpuIntStatus &0x02) {в то время как (fifoCount <размер пакета) {fifoCount =mpu.getFIFOCount (); } mpu.getFIFOBytes (fifoBuffer, packetSize); fifoCount - =размер пакета; mpu.dmpGetQuaternion (&q, fifoBuffer); mpu.dmpGetGravity (&gravity, &q); mpu.dmpGetYawPitchRoll (ypr, &q, &gravity); redrawLeds (ypr [0] * 180 / M_PI, ypr [1] * 180 / M_PI, ypr [2] * 180 / M_PI); }} логическое hasFifoOverflown (int mpuIntStatus, int fifoCount) {return mpuIntStatus &0x10 || fifoCount ==1024; } void redrawLeds (int x, int y, int z) {x =constrain (x, -1 * MAX_ANGLE, MAX_ANGLE); y =ограничение (y, -1 * MAX_ANGLE, MAX_ANGLE); если (y <0 и z> 0) {светодиоды (y, z, 0, 5, 0, 89); } иначе, если (y <0 и z <0) {светодиоды (y, z, 6, 12, 89, 0); } else if (y> 0 и z <0) {светодиоды (y, z, 13, 19, 0, 89); } иначе, если (y> 0 и z> 0) {светодиоды (y, z, 20, 24, 89, 0); }} void lightLeds (int x, int y, int fromLedPosition, int toLedPosition, int fromAngle, int toAngle) {двойной угол =(atan ((double) abs (x) / (double) abs (y)) * 4068) / 71; int ledNr =map (угол, fromAngle, toAngle, fromLedPosition, toLedPosition); printDebug (x, y, ledNr, угол); uint32_t color; для (int я =0; я position + LED_OFFSET) {return position + LED_OFFSET; } позиция возврата + LED_OFFSET - NUM_LEDS; } void printDebug (int y, int z, int lightLed, int angle) {if (millis () - lastPrintTime <500) {return; } Serial.print ("a ="); Serial.print (угол); Serial.print (";"); Serial.print ("ll ="); Serial.print (светодиоды); Serial.print (";"); Serial.print ("y ="); Serial.print (y); Serial.print (";"); Serial.print ("z ="); Serial.print (z); Serial.println (";"); lastPrintTime =миллис (); } bool initializeGyroscope () {Wire.begin (); TWBR =24; mpu.initialize (); Serial.println (mpu.testConnection ()? F («Соединение MPU6050 выполнено успешно»):F («Соединение MPU6050 не удалось»)); Serial.println (F ("Инициализация DMP ...")); devStatus =mpu.dmpInitialize (); mpu.setXGyroOffset (220); mpu.setYGyroOffset (76); mpu.setZGyroOffset (-85); mpu.setZAccelOffset (1788); if (devStatus! =0) {Serial.print (F ("Ошибка инициализации DMP (код")); Serial.println (devStatus); return false;} mpu.setDMPEnabled (true); Serial.println (F ("Включение обнаружение прерывания (внешнее прерывание Arduino 0) ... ")); attachInterrupt (0, dmpDataReady, RISING); mpuIntStatus =mpu.getIntStatus (); Serial.println (F (" DMP готов! Ожидание первого прерывания ... " )); packetSize =mpu.dmpGetFIFOPacketSize (); return true;} void dmpDataReady () {mpuInterrupt =true;}
Загрузите код:
Используя адаптер FTDI, загрузите код в Arduino.
Подключите блок питания (аккумуляторы)
Калибровка:
Здесь самое важное, что нужно откалибровать, - это константа LED_OFFSET. В моем примере - 12. Вам нужно отрегулировать это значение от 0 до 23, чтобы после включения платы светодиод загорался в том направлении, в котором вы наклоняете плату.
Если вы хотите узнать больше о том, как это работает, перейдите к следующему шагу
Шаг 4. Как это работает (необязательно)
Первый немного информации о гироскопе MPU6050. Это гироскоп MEMS (MEMS - микроэлектромеханические системы).
Каждый тип гироскопа MEMs имеет некоторую форму колеблющегося компонента, откуда может быть обнаружено аккклерация и, следовательно, изменение направления. Это потому, что согласно закону сохранения движения, вибрирующий объект любит продолжать вибрировать в той же плоскости, и любое колебательное отклонение можно использовать для изменения направления.
Гироскоп также содержит собственный микроконтроллер для вычисления крена, тангажа и рыскания с помощью причудливой математики.
Но необработанные данные гироскопа страдают от шума и дрейфа, поэтому мы использовали внешнюю библиотеку, чтобы сгладить ситуацию и предоставить нам чистые данные, пригодные для использования.
Неопиксель это светодиоды RGB с индивидуальной адресацией и объединенные цепочкой в группы и кольца. Они работают от 5 В и содержат собственные схемы, поэтому вам нужно только запитать неопиксели и связаться с ними по линии передачи данных. Связь осуществляется с помощью единственной линии данных, содержащей часы и данные (подробнее здесь). Adafruit предоставляет чистую библиотеку для взаимодействия с кольцами неопикселей.
Код
Внутри l oop () вызывается функция библиотека MPU6050_6Axis_MotionApps20. Когда в библиотеке появляются новые данные от гироскопа, она вызывает redrawLeds (x, y, z) с 3 аргументами, представляющими рыскание, тангаж и крен
Внутри redrawLeds ():
- мы ориентируемся на две оси:y, z
- мы ограничиваем обе оси от -MAX_ANGLE до + MAX_ANGLE, мы определили максимальный угол до 45, и его можно изменить
- мы разбиваем 360 градусов на 4 квадранта и вызываем функции lightLeds () для каждого следующим образом:
* y отрицательный, z положительный первый квадрант будет управлять светодиодами от 0 до 5, угол будет от 0 до 89
* y отрицательный, z отрицательный второй квадрант управляет светодиодами от 6 до 12, угол будет от 89 до 0
* ... и т. д.
- внутри светодиода функция
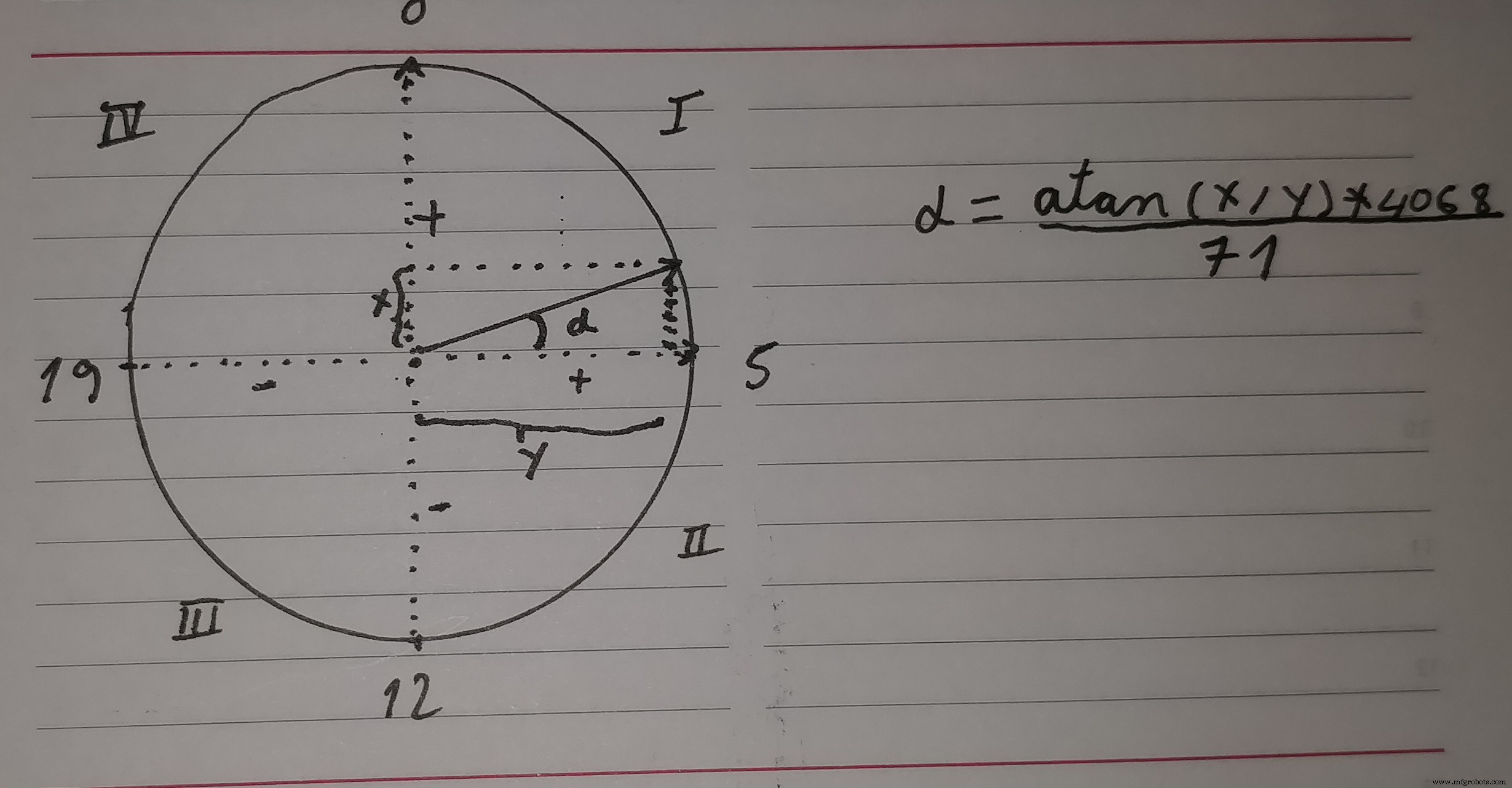
* я вычисляю угол на основе двух осей, используя арктангенс (проверьте прикрепленное изображение)
* я вычисляю, что привело к отображению, используя функцию карты arduino
* Я сбрасываю все светодиодные ленты, кроме двух, один из которых соответствует положению светодиода, которое я рассчитал ранее, и положению светодиода перед (чтобы показать эффект затухания)
* я использую функцию под названием normalizeLedPosition () учитывать калибровку неопикселей. Калибровка полезна, потому что неопиксельное кольцо можно вращать по своему усмотрению, и его следует выровнять с гироскопом
* Я также печатаю ось буксировки, какой светодиод имеет свет и угол
Математика
Я прикрепил картинку со светодиодным кольцом и тригонометрической функцией, используемой для определения угла.
Код
Код Arduino
https://github.com/danionescu0/arduino/tree/master/projects/neopixel_ring_gyroscopeСхема
sketch_gMlSrk3rCX.fzzПроизводственный процесс
- Игра с гироскопом Arduino с MPU-6050
- Простые настенные часы с использованием Adafruit 1/4 60 Ring Neopixel
- Мониторинг CO2 с помощью датчика K30
- Слепоглухое общение с 1Sheeld / Arduino
- Игровой контроллер Arduino
- Управление монетоприемником с помощью Arduino
- Pixie:наручные часы NeoPixel на базе Arduino
- Arduino с Bluetooth для управления светодиодом!
- Емкостной датчик отпечатков пальцев с Arduino или ESP8266
- Распознавание и синтез речи с помощью Arduino