


Наклон (интегрирующий) АЦП
До сих пор нам удавалось избежать огромного количества компонентов во флэш-преобразователе, только используя ЦАП как часть нашей схемы АЦП. Однако это не единственный наш вариант. Можно избежать использования ЦАП, если мы заменим аналоговую схему линейного изменения и цифровой счетчик на точную синхронизацию.
Это основная идея так называемого односкатного , или интеграция АЦП. Вместо использования ЦАП с линейным выходом мы используем схему операционного усилителя, называемую интегратором . для генерации пилообразного сигнала, который затем сравнивается с аналоговым входом с помощью компаратора.
Время, необходимое для того, чтобы пилообразная форма волны превысила уровень напряжения входного сигнала, измеряется с помощью цифрового счетчика, синхронизируемого прямоугольной волной с точной частотой (обычно от кварцевого генератора). Основная принципиальная схема показана здесь:
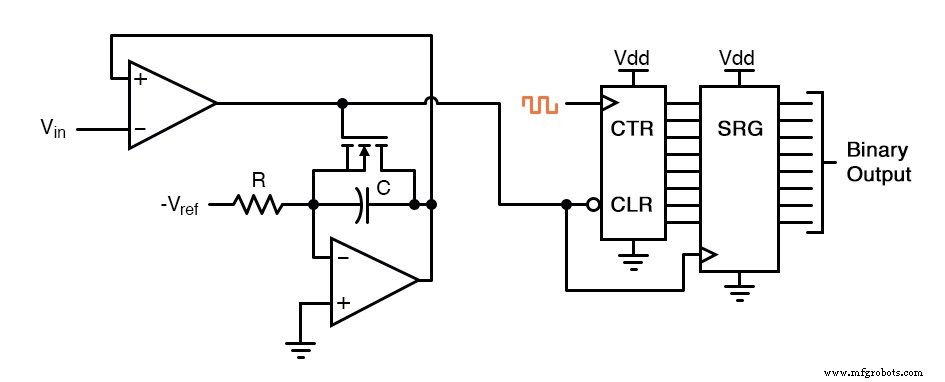
Схема транзистора с разгрузкой конденсатора IGFET, показанная здесь, немного упрощена. В действительности, схема фиксации, синхронизируемая с тактовым сигналом, скорее всего, должна быть подключена к затвору IGFET, чтобы обеспечить полную разрядку конденсатора, когда на выходе компаратора повышается уровень.
Однако основная идея очевидна на этой диаграмме. Когда на выходе компаратора низкий уровень (входное напряжение больше, чем на выходе интегратора), интегратору разрешается заряжать конденсатор линейным образом. Между тем, счетчик ведет счет со скоростью, установленной точной тактовой частотой.
Время, необходимое для зарядки конденсатора до того же уровня напряжения, что и входное, зависит от уровня входного сигнала и комбинации -V ref , R и C. Когда конденсатор достигает этого уровня напряжения, выход компаратора становится высоким, загружая выход счетчика в регистр сдвига для окончательного выхода.
IGFET срабатывает при высоком выходе компаратора, разряжая конденсатор до нуля вольт. Когда выходное напряжение интегратора падает до нуля, выход компаратора переключается обратно в низкое состояние, очищая счетчик и позволяя интегратору снова нарастить напряжение.
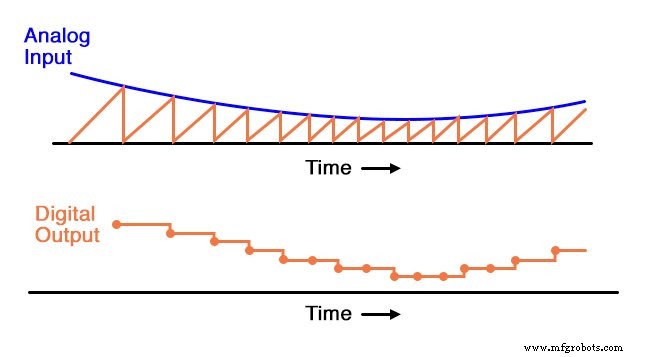
Эта схема АЦП ведет себя очень похоже на цифровой АЦП с линейным нарастанием, за исключением того, что опорное напряжение компаратора представляет собой гладкую пилообразную форму волны, а не «ступенчатую»:
Однократный АЦП страдает всеми недостатками цифрового линейного АЦП, с дополнительным недостатком в виде дрейфа калибровки . . Точное соответствие выхода этого АЦП и его входа зависит от крутизны напряжения интегратора, согласованного со скоростью счета счетчика (тактовой частотой).
В цифровом АЦП с линейным нарастанием тактовая частота не влияла на точность преобразования, только на время обновления. В этой схеме, поскольку скорость интегрирования и скорость счета не зависят друг от друга, различия между ними неизбежны по мере старения и приведут к потере точности.
Единственное, что можно сказать об этой схеме, - это то, что в ней не используется ЦАП, что снижает сложность схемы.
Конвертер двойного наклона
Ответ на эту дилемму калибровочного дрейфа можно найти в варианте конструкции, называемом двойным наклоном конвертер. В преобразователе с двойным наклоном схема интегратора приводится в действие положительной и отрицательной полярностью в чередующихся циклах для постепенного спада, а затем нарастания, а не сбрасывается до 0 В в конце каждого цикла.
В одном направлении линейного изменения интегратор приводится в действие положительным аналоговым входным сигналом (создавая отрицательную переменную скорость изменения выходного напряжения или выходную крутизну ) в течение фиксированного промежутка времени, измеряемого счетчиком с точными частотными часами. Затем, в другом направлении, с фиксированным опорным напряжением (обеспечивающим фиксированную скорость изменения выходного напряжения) со временем, измеренным тем же счетчиком.
Счетчик прекращает отсчет, когда выход интегратора достигает того же напряжения, что и при запуске фиксированной части цикла. Время, необходимое для разрядки конденсатора интегратора до исходного выходного напряжения, измеряемое величиной, накопленной счетчиком, становится цифровым выходом схемы АЦП.
Метод двойного наклона можно рассматривать аналогично с точки зрения поворотной пружины, такой как та, которая используется в механическом часовом механизме. Представьте, что мы создаем механизм для измерения скорости вращения вала.
Таким образом, частота вращения вала является нашим «входным сигналом», который будет измеряться этим устройством. Цикл измерения начинается с пружины в расслабленном состоянии.
Затем пружина поворачивается или «закручивается» вращающимся валом (входной сигнал) на фиксированный промежуток времени. При этом пружина испытывает определенное натяжение, пропорциональное скорости вала:большая скорость вала соответствует более высокой скорости наматывания и большему натяжению пружины, накопленному за этот период времени.
После этого пружина отсоединяется от вала, и ей дают возможность раскручиваться с фиксированной скоростью, время для ее раскручивания обратно в расслабленное состояние измеряется таймером. Количество времени разматывание пружины с этой фиксированной скоростью будет прямо пропорционально скорости на котором он был намотан (величина входного сигнала) в течение фиксированного времени цикла.
Этот метод аналого-цифрового преобразования позволяет избежать проблемы калибровочного дрейфа АЦП с однократным наклоном, поскольку как коэффициент интегрирования интегратора (или «усиление»), так и скорость счетчика действуют во время всего «наматывания» и «разматывания». Порции цикла. Если бы тактовая частота счетчика внезапно увеличилась, это сократило бы фиксированный период времени, когда интегратор «закручивается» (что приводит к меньшему напряжению, накопленному интегратором), но это также означало бы, что он будет считать быстрее в течение периода время, когда интегратору позволяли «раскручиваться» с фиксированной скоростью.
Пропорция, в которой счетчик считает быстрее, будет той же пропорцией, в которой накопленное напряжение интегратора уменьшилось до изменения тактовой частоты. Таким образом, ошибка тактовой частоты компенсируется сама собой, и цифровой выход будет именно таким, каким должен быть.
Еще одно важное преимущество этого метода состоит в том, что входной сигнал усредняется, поскольку он управляет интегратором в течение фиксированной части цикла. Любые изменения аналогового сигнала в течение этого периода времени имеют кумулятивный эффект на цифровой выход в конце этого цикла.
Другие стратегии АЦП просто «захватывают» уровень аналогового сигнала в определенный момент времени в каждом цикле. Если аналоговый сигнал является «зашумленным» (содержит значительные уровни паразитных пиков / провалов напряжения), одна из других технологий преобразователя АЦП может иногда преобразовывать всплески или провалы, поскольку она повторно захватывает сигнал в один момент времени.
С другой стороны, двухканальный АЦП усредняет вместе все всплески и провалы за период интегрирования, тем самым обеспечивая выходной сигнал с большей помехозащищенностью. Двухканальные АЦП используются в приложениях, требующих высокой точности.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
- Таблица аналого-цифрового преобразования
Промышленные технологии