


Защелка S-R
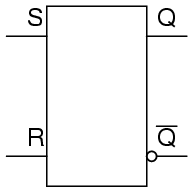
Бистабильный мультивибратор имеет два стабильные состояния, обозначенные префиксом bi в его имени. Обычно одно состояние называется установлено . а другой как сброс . Поэтому простейшее бистабильное устройство известно как set-reset . , или S-R, защелка. Чтобы создать защелку S-R, мы можем подключить два логических элемента ИЛИ-НЕ таким образом, чтобы выход одного возвращался на вход другого, и наоборот, например:
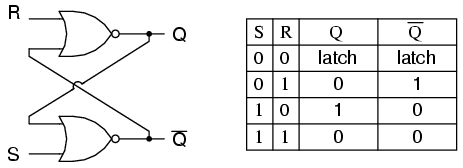
Выходы Q и не Q должны быть в противоположных состояниях. Я говорю «предполагается», потому что если оба входа S и R равны 1, то и Q, и не-Q будут равны 0. По этой причине, когда S и R равны 1, это называется недопустимым или незаконно состояние мультивибратора S-R.
В противном случае установка S =1 и R =0 «устанавливает» мультивибратор так, что Q =1, а не-Q =0. И наоборот, установка R =1 и S =0 «сбрасывает» мультивибратор в противоположное состояние. Когда S и R оба равны 0, выходы мультивибратора «фиксируются» в своих предыдущих состояниях.
Обратите внимание, как та же функция мультивибратора может быть реализована в релейной логике с теми же результатами:
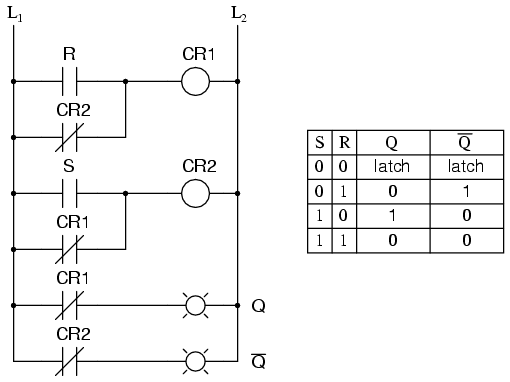
По определению установлено условие Q =1 и not-Q =0. . Условие Q =0 и not-Q =1 сброшено . . Эти термины универсальны для описания выходных состояний любой схемы мультивибратора. Проницательный наблюдатель заметит, что начальное состояние включения затвора или ступенчатой разновидности защелки S-R таково, что оба затвора (катушки) запускаются в обесточенном режиме.
Таким образом, можно ожидать, что схема запустится в недопустимом состоянии, при этом выходы Q и не-Q будут в одном и том же состоянии. Собственно, это правда! Однако недопустимое состояние нестабильно с неактивными входами S и R, и схема быстро стабилизируется в состоянии установки или сброса, потому что один вентиль (или реле) обязательно будет реагировать немного быстрее, чем другой.
Если бы оба затвора (или катушки) были точно идентичны , они будут колебаться между высоким и низким, как нестабильный мультивибратор при включении питания, никогда не достигнув точки стабильности! К счастью, в подобных случаях такое точное соответствие компонентов является редкостью.
Следует отметить, что, хотя нестабильное (постоянно колеблющееся) состояние будет чрезвычайно редким, наиболее вероятно, что в приведенной выше схеме будет один или два цикла колебаний, а конечное состояние схемы (установленное или сброшенное) после включения питания было бы непредсказуемо.
Корень проблемы - состояние гонки между двумя реле CR 1 и CR 2 .
Состояние гонки возникает, когда два взаимоисключающих события одновременно инициируются разными элементами схемы по единственной причине. В данном случае элементами схемы являются реле CR 1 и CR 2 , и их обесточенные состояния являются взаимоисключающими из-за нормально замкнутых блокирующих контактов.
Если одна катушка реле обесточена, ее нормально замкнутый контакт будет держать другую катушку под напряжением, таким образом поддерживая цепь в одном из двух состояний (установленное или сброшенное). Блокировка предотвращает оба реле от фиксации.
Однако, если оба катушки реле запускаются в обесточенном состоянии (например, после того, как вся цепь была обесточена и затем включена), оба реле будут «гоняться», чтобы зафиксироваться, когда они получают питание («единственная причина») через нормально замкнутый контакт другого реле. Одно из этих реле неизбежно достигнет этого состояния раньше другого, тем самым размыкая нормально замкнутый блокирующий контакт и обесточивая катушку другого реле.
Какое реле «выиграет» в этой гонке, зависит от физических характеристик реле, а не от схемы, поэтому разработчик не может гарантировать, в какое состояние схема перейдет после включения питания. При проектировании схем следует избегать условий гонки, прежде всего из-за непредсказуемости, которая будет создана. Один из способов избежать такого состояния - вставить в схему реле с выдержкой времени, чтобы на короткое время отключить одно из конкурирующих реле, дав другому явное преимущество.
Другими словами, намеренно замедляя обесточивание одной эстафеты, мы гарантируем, что другая эстафета всегда будет «выигрывать», а результаты гонки всегда будут предсказуемыми.
Вот пример того, как реле с выдержкой времени может быть применено к вышеуказанной схеме, чтобы избежать состояния гонки:
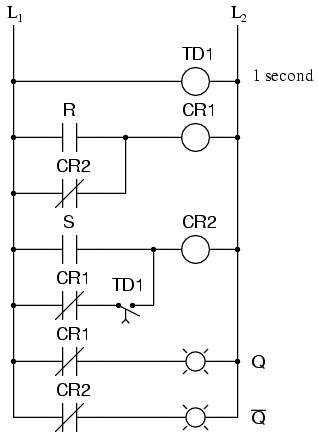
При включении цепи реле с выдержкой времени контактирует TD 1 на пятой ступени вниз задержит закрытие на 1 секунду. Открытие этого контакта на 1 секунду предотвращает реле CR 2 от возбуждения через контакт CR 1 в нормально закрытом состоянии после включения.
Следовательно, реле CR 1 будет разрешено подавать питание первым (с ускорением в 1 секунду), тем самым открывая нормально закрытый CR 1 контакт на пятой ступени, предотвращающий CR 2 от подачи питания без включения входа S.
Конечным результатом является то, что схема включается чисто и предсказуемо в состоянии сброса с S =0 и R =0. Следует отметить, что условия гонки не ограничиваются цепями реле. Цепи полупроводниковой логики также могут пострадать от неблагоприятных последствий условий гонки, если они неправильно спроектированы.
Сложные компьютерные программы, если на то пошло, также могут вызвать проблемы гонки, если они неправильно спроектированы. Проблемы гонки возможны для любой последовательной системы и могут быть обнаружены только через некоторое время после первоначального тестирования системы. Их бывает очень сложно обнаружить и устранить.
Практическое применение схемы защелки S-R может заключаться в запуске и остановке двигателя с использованием нормально разомкнутых, мгновенных контактов кнопочного переключателя для обоих пуска (S) и стоп (R) переключает, затем активирует контактор двигателя с помощью CR 1 или CR 2 контакт (или используя контактор вместо CR 1 или CR 2 ).
Обычно используется гораздо более простая схема релейной логики, например эта:
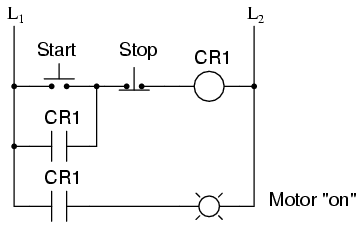
В приведенной выше схеме запуска / остановки двигателя CR 1 контакт параллельно с запуском переключающий контакт называется «герметичным» контактом, потому что он «запечатывает» или фиксирует управляющее реле CR 1 в состоянии под напряжением после старта переключатель был выпущен.
Чтобы сломать «пломбу», или «разблокировать», или «сбросить» цепь, стоп нажата кнопка, которая обесточивает CR 1 и восстанавливает герметичный контакт в нормально разомкнутое состояние. Обратите внимание, однако, что эта схема выполняет почти ту же функцию, что и защелка S-R.
Кроме того, обратите внимание, что эта схема не имеет внутренней проблемы нестабильности (если даже существует отдаленная возможность), как и конструкция защелки S-R с двумя реле. В полупроводниковой форме защелки S-R поставляются в предварительно упакованных единицах, поэтому вам не нужно строить их из отдельных ворот. Они обозначаются так:
ОБЗОР:
- бистабильный мультивибратор - это один с двумя стабильные выходные состояния.
- В бистабильном мультивибраторе условие Q =1 и not-Q =0 определяется как set . Условие Q =0 и not-Q =1, наоборот, определяется как сброс . . Если Q и не-Q принудительно переводятся в одно и то же состояние (оба 0 или оба 1), это состояние называется недопустимым .
- В защелке S-R активация входа S устанавливает цепь, а активация входа R сбрасывает цепь. Если оба входа S и R активированы одновременно, цепь будет в недопустимом состоянии.
- состояние гонки это состояние в последовательной системе, где два взаимоисключающих события одновременно инициируются одной причиной.
Промышленные технологии
- Защелка NOR Gate S-R
- Защелка включения NAND Gate S-R
- Защелка Gated S-R
- Основы изготовления печатных плат
- История печатных плат
- Каково использование контрольных точек в цепи печатной платы?
- Трассировка цепи — Полное руководство
- Процесс сборки печатной платы
- Различные способы сборки печатной платы
- Эволюция печатных плат