


MEMS IMU следующего поколения — высокая производительность, масштабируемость
Чтобы узнать, что ждет автомобильные навигационные системы МЭМС, я взял интервью у Янга Чжао, генерального директора, и Теомана Устуна, вице-президента по маркетингу и развитию бизнеса, ACEINNA, Inc. (Бостон, Массачусетс).
Технические обзоры: Почему вы называете IMU ACEINNA следующего поколения?
Ян Чжао: В идеальных условиях управлять автомобилем можно с помощью одной камеры. Но для обеспечения постоянной безопасности и доступности автономные транспортные средства все чаще полагаются на дополнительные сенсорные технологии. Однако такие датчики, как Vision, Radar, Lidar, GNSS, RTK, могут быть отключены в определенных ситуациях. IMU — единственный датчик, который продолжает работать, даже когда все остальные датчики выходят из строя. Наша задача состоит в том, чтобы увеличить количество времени, в течение которого счет с ИДУ будет надежным. Текущий продукт, который у нас есть, больше похож на высококлассный промышленный уровень, но предназначен для включения в пассажирские карты.
Теоман Устун: Революционная технология MEMS, которую мы разрабатываем, позволит достичь производительности оптоволоконного гироскопа по цене кремниевого решения MEMS. По сути, это революционная технология.
С каждым поколением мы улучшали характеристики нашего IMU с точки зрения углового случайного блуждания (ARW), нестабильности смещения и устойчивости к вибрации/ударам. В этом последнем поколении мы также добавили архитектуру с тройным резервированием, что чрезвычайно важно по двум причинам. Это повышает надежность автомобильного уровня, а также повышает производительность IMU. Например, насколько мне известно, у нас есть единственная на рынке INS (инерциальная навигационная система), сертифицированная ASIL-B ISO 26262 (уровень целостности автомобильной безопасности), интегрированная с тройным резервированием IMU. Эта квалификация в основном дает клиентам автомобилей уверенность в том, что наш датчик будет надежно генерировать данные в течение всего срока службы автомобиля.
Наши новейшие IMU также имеют функции открытой архитектуры, которые позволяют нашим клиентам использовать свои ноу-хау или реализовывать свои секреты в нашем оборудовании.
Чжао: IMU аэрокосмического класса обладают превосходной стабильностью, но они большие, тяжелые и дорогие — см. Рисунок 1 для сравнения IMU различных классов. Мы стремимся вывести на рынок систему IMU, которая будет приближаться к навигационному уровню. Сегодня вы можете получить IMU навигационного класса, но все они используют волоконно-оптические гироскопы и стоят в диапазоне десятков тысяч долларов. Они большие, тяжелые и дорогие, но в авионике и военных это не является решающим фактором.
Но когда вы говорите об использовании IMU в автомобиле, никто не будет платить такие деньги. Итак, что мы пытаемся сделать, так это разработать технологию MEMS IMU нового поколения, которая может достичь производительности навигационного класса, которая может приблизиться к производительности волоконно-оптического гироскопа. В отличие от других, которые изначально ориентировались на IMU потребительского уровня, а теперь пытаются переключить их на более производительные приложения, мы начали с высокопроизводительных промышленных приложений, чтобы установить требования к нашему автомобильному датчику.
Самые последние автомобильные продукты, которые мы представили, являются экономически эффективными. Они в значительной степени спроектированы и разработаны снизу вверх, чтобы оптимизировать соотношение цена / производительность для приложений с большим объемом. Мы стремимся к цене менее 500 долларов США, а в конечном итоге и того меньше.
Технические обзоры: Не могли бы вы объяснить некоторые функции, повышающие точность, стабильность и надежность вашего нового IMU.
Устун: Во-первых, наши датчики IMU имеют тройное резервирование — три акселерометра и три гироскопа. Мы контролируем все критические параметры, включая напряжения, токи и температуры, а также производительность отдельных IMU. Наличие этой тройной избыточности позволяет нам осуществлять непрерывное самотестирование. Мы получаем уверенность в производительности гироскопа и акселерометра, сравнивая и сопоставляя этот тройной поток данных.

У нас также есть шесть степеней свободы:три акселерометра и три гироскопа измеряют оси XYZ. Гироскопы измеряют скорость вращения, что при интегрировании дает изменение углового положения. Акселерометр измеряет ускорение, которое при интегрировании дает скорость, а при повторном интегрировании дает положение. Обрабатывая данные гироскопа и акселерометра, а также используя фильтры и алгоритмы, оптимизированные для данного приложения, мы получаем действительно точные угловые данные для крена, тангажа и рыскания (см. рис. 2). Наиболее важными данными для автомобильного приложения являются рыскание, которое указывает степень дрейфа автомобиля. Шаг указывает, идете ли вы вверх или вниз по склону. Надеюсь, вы никогда не увидите крена в своей машине.
Технические обзоры: Какую точность вы могли бы поддерживать в течение какого периода времени?
Устун: Это очень сложно сказать, потому что это зависит от очень многих разных сценариев. В настоящее время мы должны добиться точности на уровне полосы движения. Ширина полосы составляет около трех метров, а ширина легкового автомобиля — около двух метров. Поскольку вы хотите убедиться, что не выходите за пределы полосы движения, у вас есть примерно плюс-минус полметра, прежде чем вы занесете слишком далеко. При типичной автомобильной скорости коррекция на полметра может быть достигнута менее чем за секунду. Так как при нулевом счислении можно сохранять требуемую точность от 60 до 90 секунд, наш IMU может легко удерживать машину в пределах своей полосы.
Технические обзоры: Таким образом, IMU дает вам относительную точность. А как насчет абсолютной точности?
Устун: Данные об абсолютном местоположении обычно извлекаются из сигнала GNSS. Исторически точность позиционирования приемников GNSS составляла метр и более. Таким образом, GNSS сама по себе недостаточно хороша для требуемой точности на уровне автомобильной полосы до 2 см.
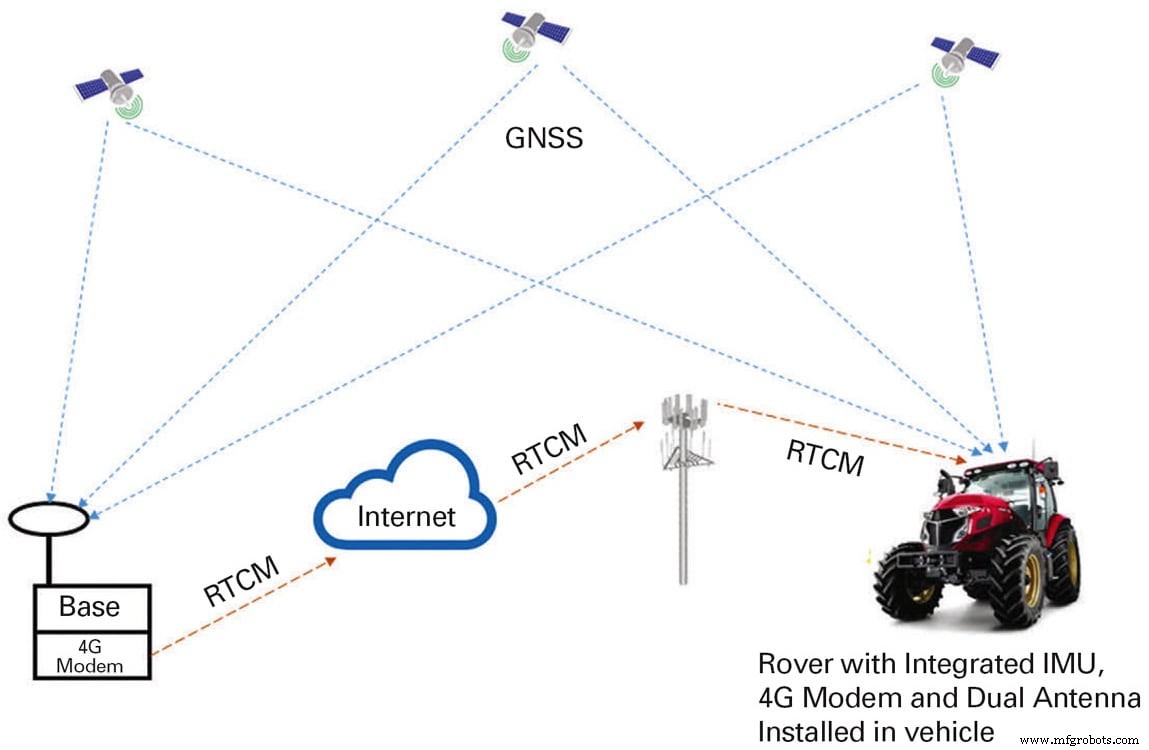
Кинематика в реальном времени (RTK) — это метод повышения точности позиционирования приемника GNSS. Он использует сеть базовых станций, которые могут отправлять поправки в наш установленный на транспортном средстве механизм позиционирования RTK, который использует их для более точного пересчета своего местоположения.
RTK — это услуга, которую вы можете купить или подписаться из многих источников. Мы все чаще видим, что коммуникационная инфраструктура — даже поставщики телекоммуникационных услуг, такие как Verizon, Softbank или China Mobile, — начали предлагать услуги RTK. С точки зрения нашего продукта мы не зависим от поставщика услуг — мы намерены поддерживать любого из этих поставщиков услуг RTK, чтобы помочь нашим клиентам достичь пределов точности, которые они ищут. Мы предоставляем аппаратное и программное решение.
Хотя мы не предоставляем услугу, мы даем возможность нашим клиентам выбрать наиболее подходящую для них. Тем не менее, мы сначала квалифицируем эти услуги. Мы гарантируем их совместимость с нашим аппаратным и программным обеспечением. Затем мы размещаем его на нашем веб-сайте, чтобы предоставить клиентам возможность выбора из списка поставщиков услуг. Чаще всего RTK предоставляется как услуга в сети 4G LTE. Если нет приема 4G LTE, есть альтернативные способы приема корректирующих сигналов, например спутниковая связь.
Для RTK вы размещаете базовые станции в сети:есть эмпирическое правило, что обычно вы размещаете базовые станции в радиусе 50 миль. Эти базовые станции расположены так, что их местоположение известно очень точно. Поправки генерируются путем измерения ошибки между сигналом GNSS и точно известным местоположением базовой станции.
Итак, у нас есть комплексное решение:инерциальная навигационная система, которая включает в себя наш тройной резервный высокопроизводительный IMU с шестью степенями свободы в сочетании с двухчастотным приемником GNSS в двух разных форм-факторах. Одним из них является форм-фактор модуля. Если клиент хочет переплавить его в своем собственном блоке управления двигателем (ЭБУ), он может это сделать, или в противном случае он может использовать наше готовое решение «включай и работай». По сути, вы просто подключаете антенну GPS/GNSS, и система будет работать на шине CAN или Ethernet.
Эта статья была написана Эдом Брауном, редактором Sensor Technology. Для получения дополнительной информации посетите здесь .
Датчик
- VersaLogic выпускает высокопроизводительный встроенный компьютер на базе Xeon
- Подразделение Lanxess ’по производству высокопроизводительных материалов становится юридически независимым
- Технология HDPE с барьером высокой влажности для многослойной гибкой упаковки
- Маркировка в пресс-форме:высокая эффективность при меньших затратах
- Высокоэффективный алюминиевый сплав DISPAL S220 F
- Высокоэффективный алюминиевый сплав DISPAL S220 O
- Высокоэффективный алюминиевый сплав DISPAL S225 F, формованный методом распыления
- Высокоэффективный алюминиевый сплав DISPAL S232 T6, формованный методом распыления
- Высокоэффективный алюминиевый сплав DISPAL S232 T6x, формованный методом распыления
- Высокоэффективный алюминиевый сплав DISPAL S250 F