


Ультразвуковой левитационный аппарат с использованием ARDUINO
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
| |||
 |
| |||
 |
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Очень интересно увидеть что-то парящее в воздухе или в открытом космосе, например космические корабли пришельцев. в этом и заключается суть антигравитационного проекта. Объект (в основном небольшой лист бумаги или термоколь) помещается между двумя ультразвуковыми преобразователями, которые генерируют акустические звуковые волны. Объект парит в воздухе из-за этих волн, которые кажутся антигравитационными.
в этом уроке давайте обсудим ультразвуковую левитацию и создадим левитационную машину с использованием Arduino
Шаг 1. Как это возможно
Чтобы понять, как работает акустическая левитация, вам сначала нужно немного узнать о гравитации, воздухе и звуке. Во-первых, гравитация - это сила, заставляющая объекты притягиваться друг к другу. Огромный объект, такой как Земля, легко притягивает объекты, которые находятся рядом с ним, например, яблоки, свисающие с деревьев. Ученые не определили, что именно вызывает это притяжение, но они считают, что оно существует повсюду во Вселенной.
Во-вторых, воздух - это жидкость, которая ведет себя практически так же, как жидкости. Как и жидкости, воздух состоит из микроскопических частиц, которые движутся относительно друг друга. Воздух также движется, как и вода - на самом деле, некоторые аэродинамические испытания проводятся под водой, а не в воздухе. Частицы в газах, как и те, что составляют воздух, просто находятся дальше друг от друга и движутся быстрее, чем частицы в жидкостях.
В-третьих, звук - это вибрация, которая распространяется через среду, например газ, жидкость или твердый объект. если ударить в колокол, он завибрирует в воздухе. Когда одна сторона колокола выдвигается, она толкает молекулы воздуха рядом с собой, увеличивая давление в этой области воздуха. Эта область более высокого давления представляет собой сжатие. По мере того, как сторона колокола возвращается внутрь, он разрывает молекулы, создавая область более низкого давления, называемую разрежением. Без этого движения молекул звук не мог бы распространяться, поэтому в вакууме звука нет.
акустический левитатор
Базовый акустический левитатор состоит из двух основных частей - преобразователя, который представляет собой вибрирующую поверхность, издающую звук, и отражателя. Часто преобразователь и отражатель имеют вогнутые поверхности, помогающие сфокусировать звук. Звуковая волна распространяется от преобразователя и отражается от отражателя. Три основных свойства этой бегущей, отражающей волны помогают ей подвешивать объекты в воздухе.
когда звуковая волна отражается от поверхности, взаимодействие между ее сжатием и разрежением вызывает интерференцию. Сжатия, которые встречаются с другими сжатиями, усиливают друг друга, а сжатия, которые встречаются с разрежениями, уравновешивают друг друга. Иногда отражение и интерференция могут объединяться, создавая стоячую волну . . Кажется, что стоячие волны перемещаются вперед и назад или колеблются сегментами, а не перемещаются с места на место. Эта иллюзия неподвижности и дает название стоячим волнам. Стоячие звуковые волны определили узлы, или области минимального давления, и пучности узлов , или области максимального давления. Узлы стоячей волны являются причиной акустической левитации.
Поместив отражатель на правильном расстоянии от преобразователя, акустический левитатор создает стоячую волну. Когда ориентация волны параллельна силе тяжести, части стоячей волны имеют постоянное давление вниз, а другие - постоянное давление вверх. Узлы имеют очень небольшое давление.
чтобы мы могли помещать туда небольшие предметы и левитировать
Шаг 2. Необходимые компоненты
- Arduino Uno / Arduino Nano ATMEGA328P
- Ультразвуковой модуль HC-SR04
- L239d H-мостовой модуль L298
- Обычная печатная плата
- Аккумулятор или блок питания 7,4 В
- Соединительный провод.
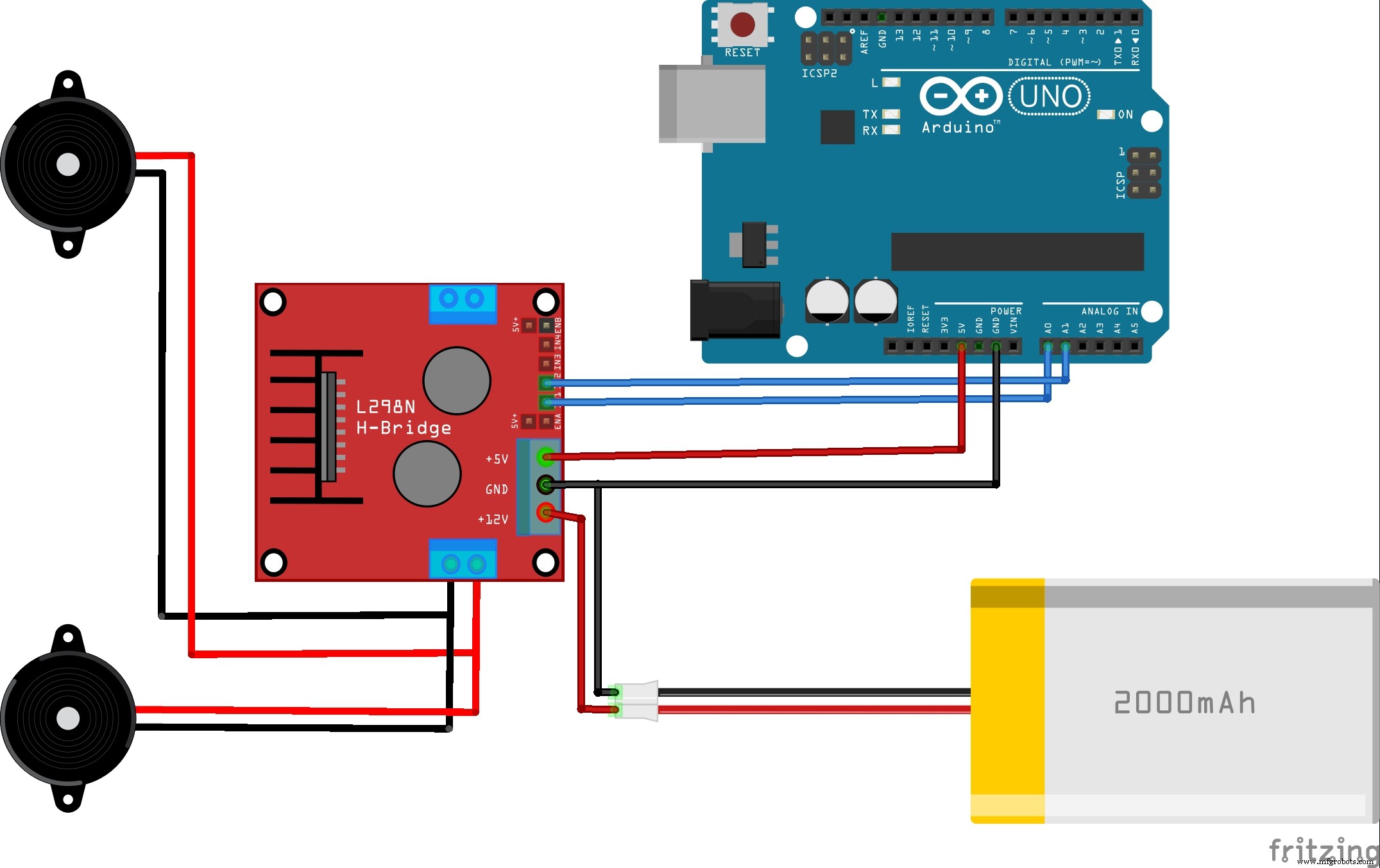
Шаг 3. Принципиальная схема
Принцип работы схемы очень прост. Основным компонентом этого проекта является Arduino, ИС привода двигателя L298 и ультразвуковой преобразователь, собранные из модуля ультразвукового датчика HCSR04. Как правило, ультразвуковой датчик передает акустическую волну частотного сигнала от 25 кГц до 50 кГц, и в этом проекте мы используем ультразвуковой преобразователь HCSR04. Эти ультразвуковые волны создают стоячие волны с узлами и пучностями.
рабочая частота этого ультразвукового преобразователя составляет 40 кГц. Итак, цель использования Arduino и этого небольшого фрагмента кода состоит в том, чтобы сгенерировать высокочастотный колебательный сигнал 40 кГц для моего ультразвукового датчика или преобразователя, и этот импульс подается на вход IC L293D драйвера дуэльного двигателя (от контактов Arduino A0 и A1 ) для управления ультразвуковым преобразователем. Наконец, мы применяем этот высокочастотный колебательный сигнал 40 кГц вместе с управляющим напряжением через управляющую микросхему (обычно 7,4 В) на ультразвуковом преобразователе. В результате ультразвуковой преобразователь производит акустические звуковые волны. Мы поместили два преобразователя лицом к лицу в противоположном направлении таким образом, чтобы между ними оставалось некоторое пространство. Акустические звуковые волны проходят между двумя преобразователями и позволяют объекту плавать. Посмотрите видео. Дополнительная информация обо всем, что объясняется в этом видео
Шаг 4:Изготовление преобразователя
Для начала нам нужно извлечь передатчик и приемник из ультразвукового модуля. Также снимите защитную крышку и подключите к ней длинные провода. Затем поместите передатчик и приемник один над другим, помните, что положение ультразвуковых преобразователей очень важно. Они должны быть обращены друг к другу в противоположном направлении, что очень важно, и они должны находиться на одной линии, чтобы ультразвуковые звуковые волны могли распространяться и пересекаться друг с другом в противоположных направлениях. Для этого я использовал пенопласт, орехи и боты
Для лучшего понимания посмотрите видео о создании
Шаг 5. Программирование
Кодировка очень проста, всего несколько строк. Используя этот небольшой код с помощью таймера и функций прерывания, мы устанавливаем высокий или низкий (0/1) и генерируем колебательный сигнал 40 кГц на выходные контакты Arduino A0 и A1.
скачать код Arduino отсюда
Шаг 6. Подключения
подключить все согласно принципиальной схеме
не забудьте соединить оба заземления вместе
Шаг 7. Важные моменты и улучшения
Размещение датчика очень важно, поэтому постарайтесь разместить его в правильном положении
Мы можем поднимать только небольшие куски легких предметов, таких как термобумага и бумага
Должен обеспечивать ток не менее 2 А
Затем я попытался левитировать большие объекты, для чего сначала увеличил число. О передатчиках и ресиверах, которые не работали. В следующий раз я попробовал с высоким напряжением, и это тоже не удалось.
Улучшения
Позже я понял, что потерпел неудачу из-за. Расположение преобразователей, если мы используем несколько передатчиков, мы должны использовать структуру Curvy.
Шаг 8:Спасибо
Любые сомнения Прокомментируйте это ниже
Код
Суть
https://gist.github.com/EDISON-SCIENCE-CORNER/3ebb7020d0dacbbae949afb8f29bfcc3 Схема
Производственный процесс
- Затемнение света с ШИМ с помощью кнопки
- FlickMote
- IOT - Smart Jar с использованием ESP8266, Arduino и ультразвукового датчика
- Железный человек
- Найди меня
- Как измерить массу Земли с помощью Arduino
- Управление увлажнителем Arduino
- Сонар с использованием Arduino и отображение при обработке IDE
- Счетчик автомобилей с использованием Arduino + Обработка + PHP
- Как сделать компас с помощью Arduino и Processing IDE